



【摘要】:史密斯预估补偿调节器力图避免反馈信号的延迟,使进入调节器输入端的反馈信号提前于被调量,使调节器的输出纠正这种“迟来的控制”。使用史密斯预估补偿调节器后,会将被控对象的延迟排除于系统特征方程之外,使其仅仅表现为系统响应对输入的延迟,对于提高系统稳定性有很大好处。计算机控制的史密斯预估补偿调节器框图如图6-7-1所示。图6-7-1 史密斯预估补偿调节器控制原理图图中,将被控对象分离成不含延迟的Gp和延迟环节e-τs两部分。
由于被控对象的滞后特性,使被调量的反馈信号延迟到达调节器的输入端,使调节器的输出,即系统的控制也发生相应的延迟。史密斯预估补偿调节器力图避免反馈信号的延迟,使进入调节器输入端的反馈信号提前于被调量,使调节器的输出纠正这种“迟来的控制”。使用史密斯预估补偿调节器后,会将被控对象的延迟排除于系统特征方程之外,使其仅仅表现为系统响应对输入的延迟,对于提高系统稳定性有很大好处。
计算机控制的史密斯预估补偿调节器框图如图6-7-1所示。
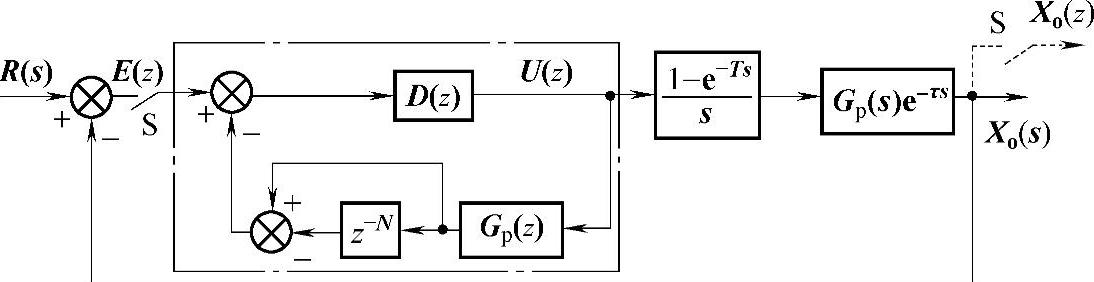
图6-7-1 史密斯预估补偿调节器控制原理图
图中,将被控对象分离成不含延迟的Gp(s)和延迟环节e-τs两部分。设延迟时间τ=NT,则延迟部分的脉冲传递函数为z-N。将不含延迟的部分带零阶补偿器离散化,得到

考虑延迟之后,被控对象的离散化传递函数为z-NGp(z)。
点画线框内补偿器部分的传递函数为
Dg(z)=(1-z-N)Gp(z) (6-7-2)(https://www.xing528.com)
点画线框内由普通调节器D(z)与补偿器式(6-7-2)构成史密斯预估补偿调节器

图6-7-1的前向通道由史密斯预估补偿调节器与被控对象串联,其闭环传递函数为

代入式(6-7-3)化简,有

式(6-7-5)表明,延迟部分已经分离到闭环之外,只对系统的响应造成延迟。式中不含延迟的被控对象Gp(z)通常为一阶或二阶惯性环节,但并不像大林算法那样仅限于一阶或二阶惯性环节。D(z)通常为数字PID调节器。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。