



【例6-13】大林算法仿真仪。
大林算法仿真分析仪程序如shixz06_13所示。其程序框图面板和前面板分别如图6-6-2和图6-6-3所示。
(1)纯滞后二阶惯性被控对象和期望闭环传递函数离散化模型
用户在前面板上按照式(6-6-1)和式(6-6-2)设定二阶系统时间常数T1,T2,延迟时间tao,增益K,采样周期Ts和期望时间常数Th,离散化程序段如下:

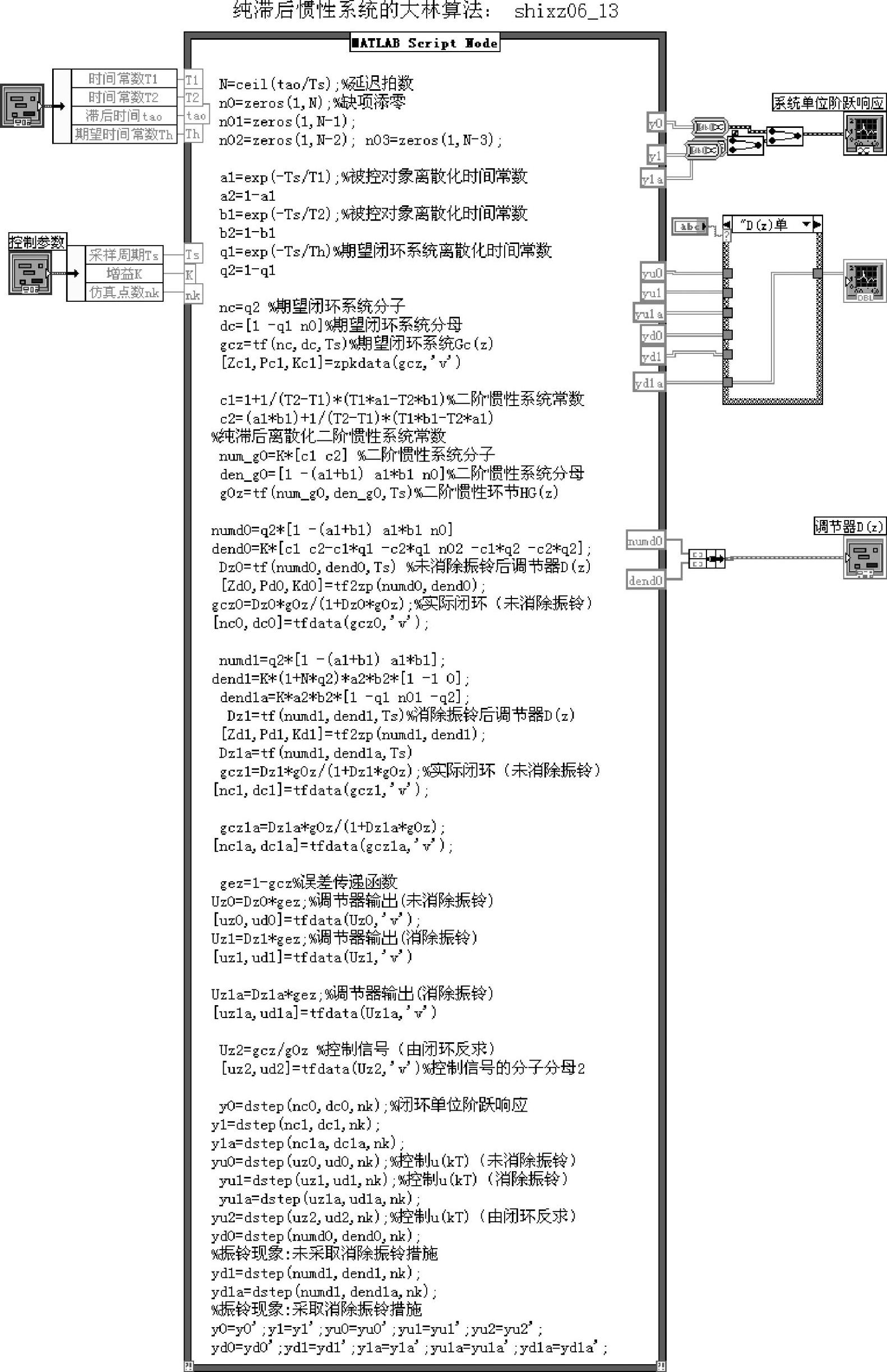
图6-6-2 程序shixz06_13框图面板
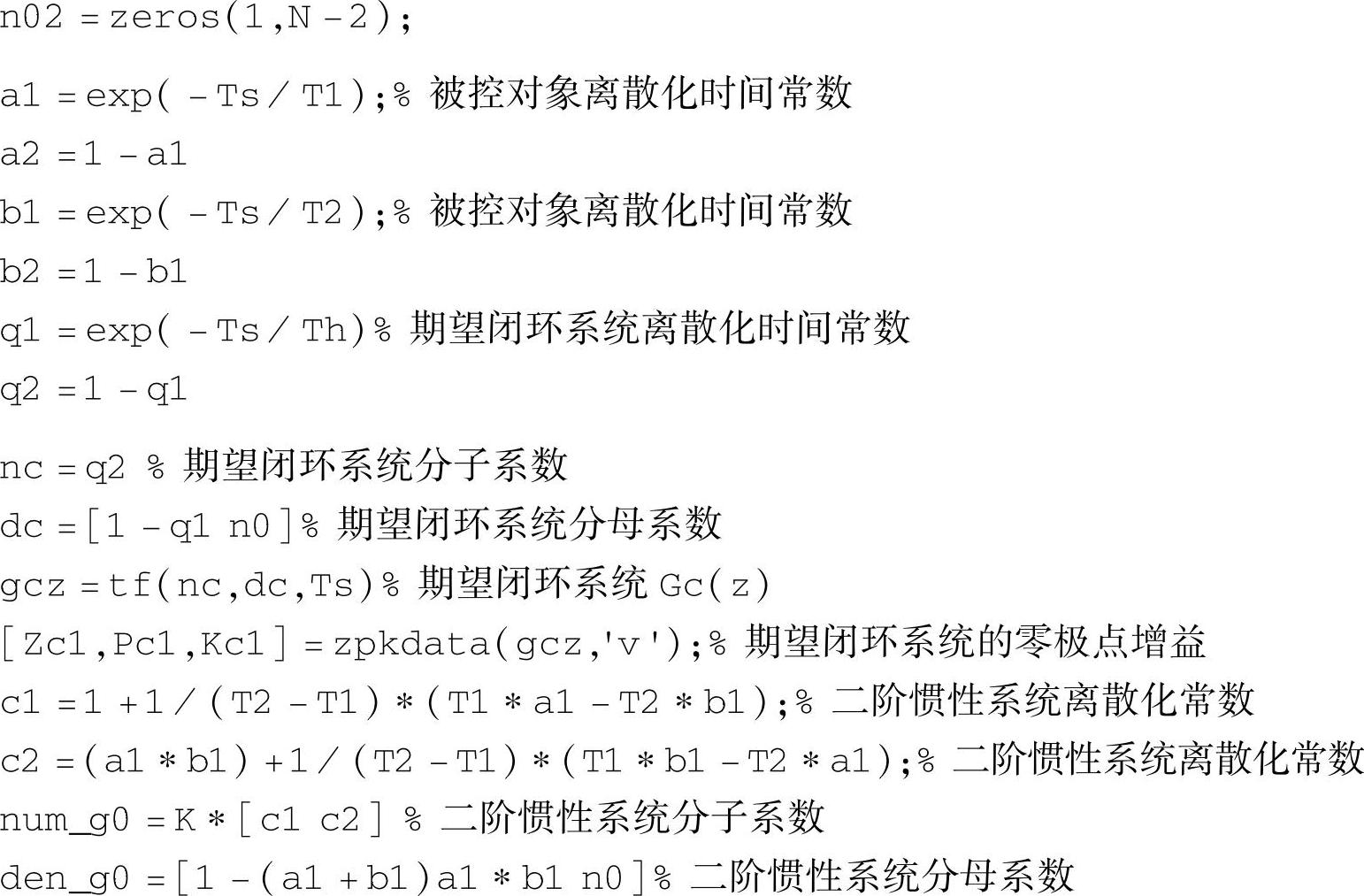
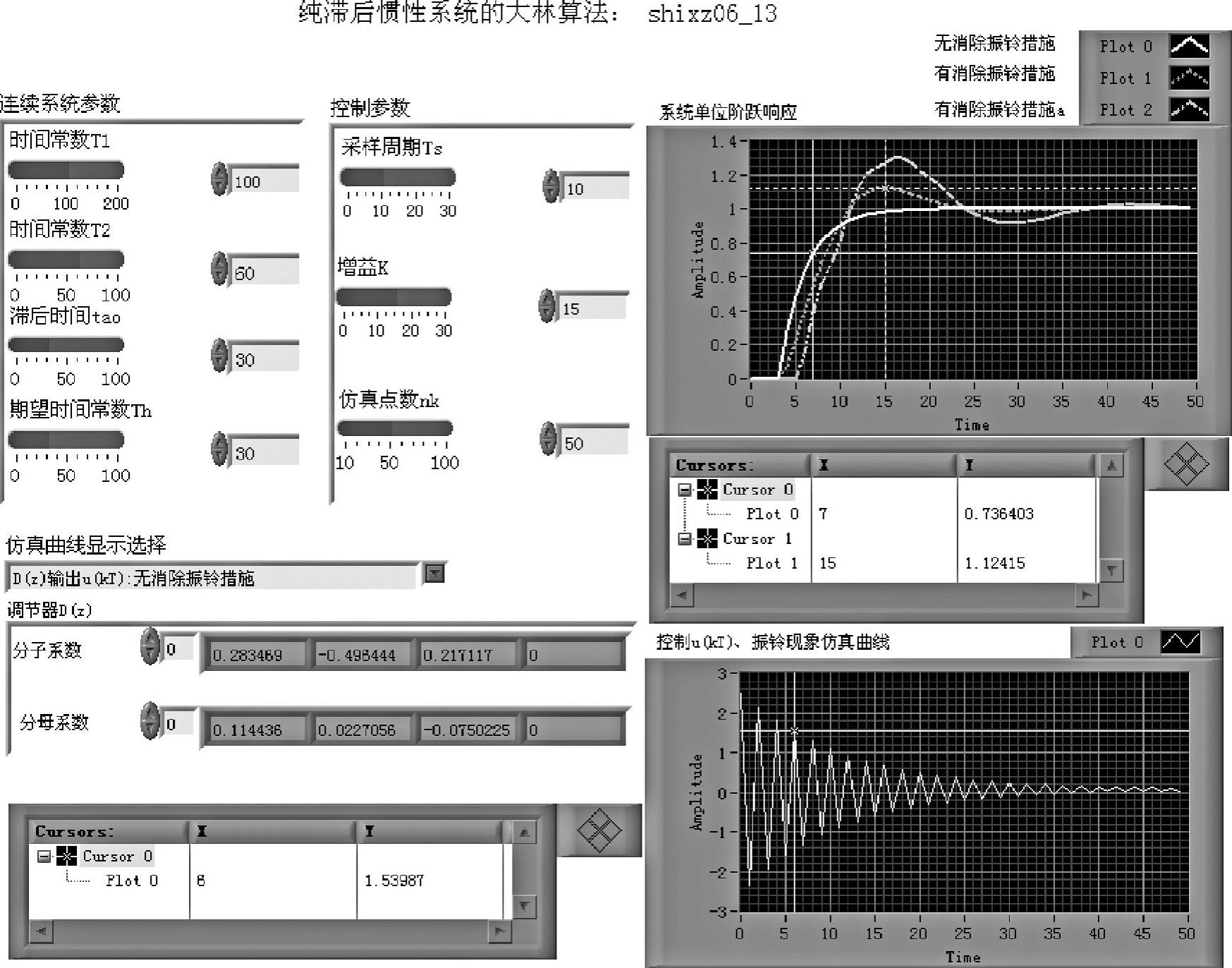
图6-6-3 程序shixz06_13前面板

运行后,实例期望闭环系统式(6-6-3)(gcz)为

广义被控对象式(6-6-4)(g0z)为

读者还可以使用命令c2d获得无延迟部分的离散化模型。
(2)无消除振铃措施的调节器D(z)(Dz0)


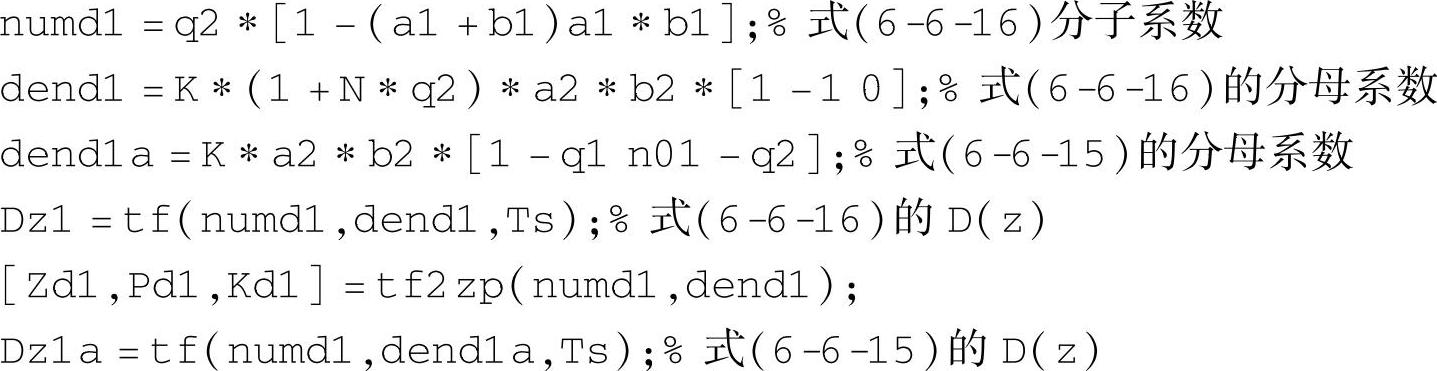
(3)有消除振铃措施的调节器D(z)
 (https://www.xing528.com)
(https://www.xing528.com)

(4)实际闭环传递函数
(5)调节器的输出U(z)

(6)输出、控制及振铃的时域数值
图6-6-3的系统单位阶跃响应示波器上绘制了3条响应曲线。曲线plot0对应的闭环使用调节器式(6-6-11),未采用消除振铃措施;曲线plot1对应的闭环使用调节器式(6-6-16),消除了部分振铃极点;曲线plot2对应的闭环使用调节器式(6-6-15),消除了全部振铃极点。它们的稳态特性相同,但其瞬态特性不同,未消除振铃极点的响应无超调,最符合纯滞后惯性被控对象控制的初衷要求。采用消除全部振铃极点的调节器,其闭环响应出现较大超调和一次振荡。消除部分振铃极点的瞬态特性居于二者之间。造成这种情况的原因在于,使用未消除振铃的调节器构成实际闭环系统时,可以还原成期望闭环传递函数,实际上曲线plot0就是期望闭环传递函数的单位阶跃响应。而消除振铃极点之后的调节器构成闭环时与期望闭环有一定误差,使其输出响应也与期望闭环响应产生差距。
系统的控制u(kT)和调节器的单位阶跃响应示于第二个示波器上。可以使用图6-6-4的选择开关选择需要显示的曲线。
几种不同振铃现象的仿真曲线如图6-6-5~图6-6-7所示。根据振铃幅度的定义式(6-6-12),图6-6-5~图6-6-7的振铃幅度依次为4.8297,0.5252和0。附带说明,调节器的输出(控制)和调节器的单位阶跃响应(振铃)的最初几拍具有相同的幅值,但随着拍数的增加,二者出现差别。读者可以通过仿真仪的显示曲线选择加以研究。
程序shixz06_13a示出了使用阶梯波显示曲线的大林算法,可供参考。

图6-6-4 仿真曲线显示选择开关
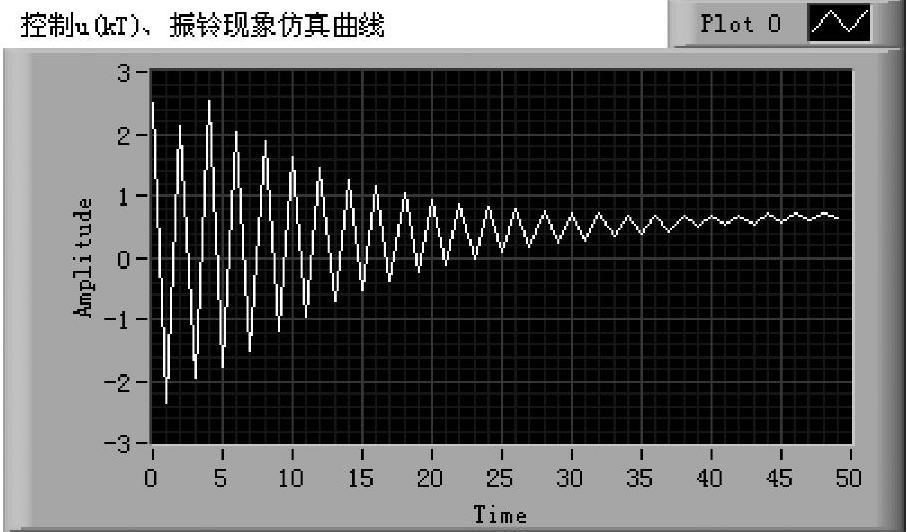
图6-6-5 无消除振铃措施的u(kT)
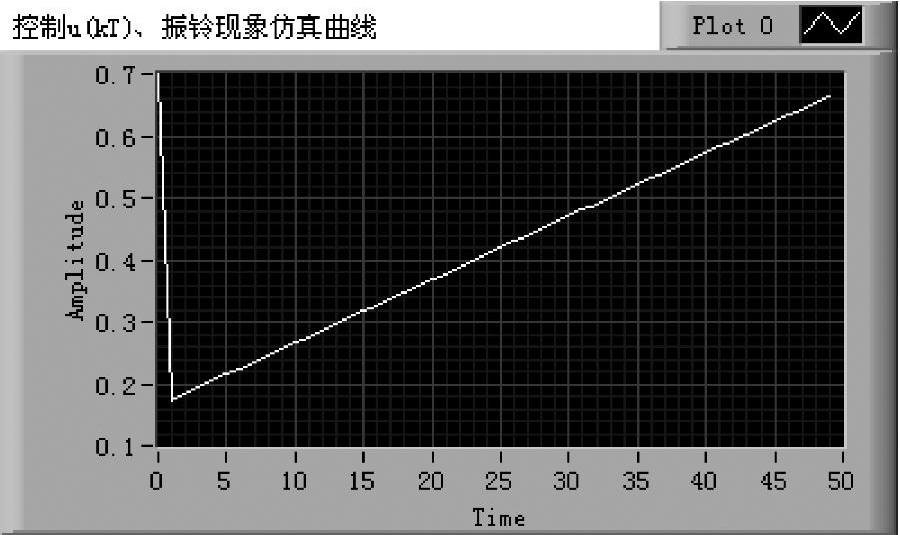
图6-6-6 消除部分振铃极点的u(kT)
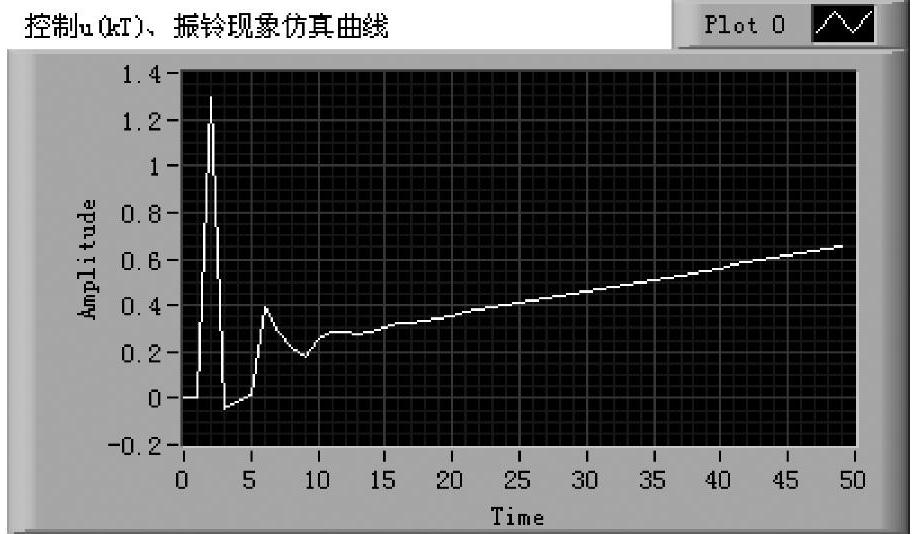
图6-6-7 消除全部振铃极点的u(kT)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。