



【例6-12】数字PID调节器的设计仿真分析仪。
数字PID调节器的设计仿真分析仪程序如shixz06_12所示。前面板和程序框图面板分别如图6-5-2和图6-5-3所示。
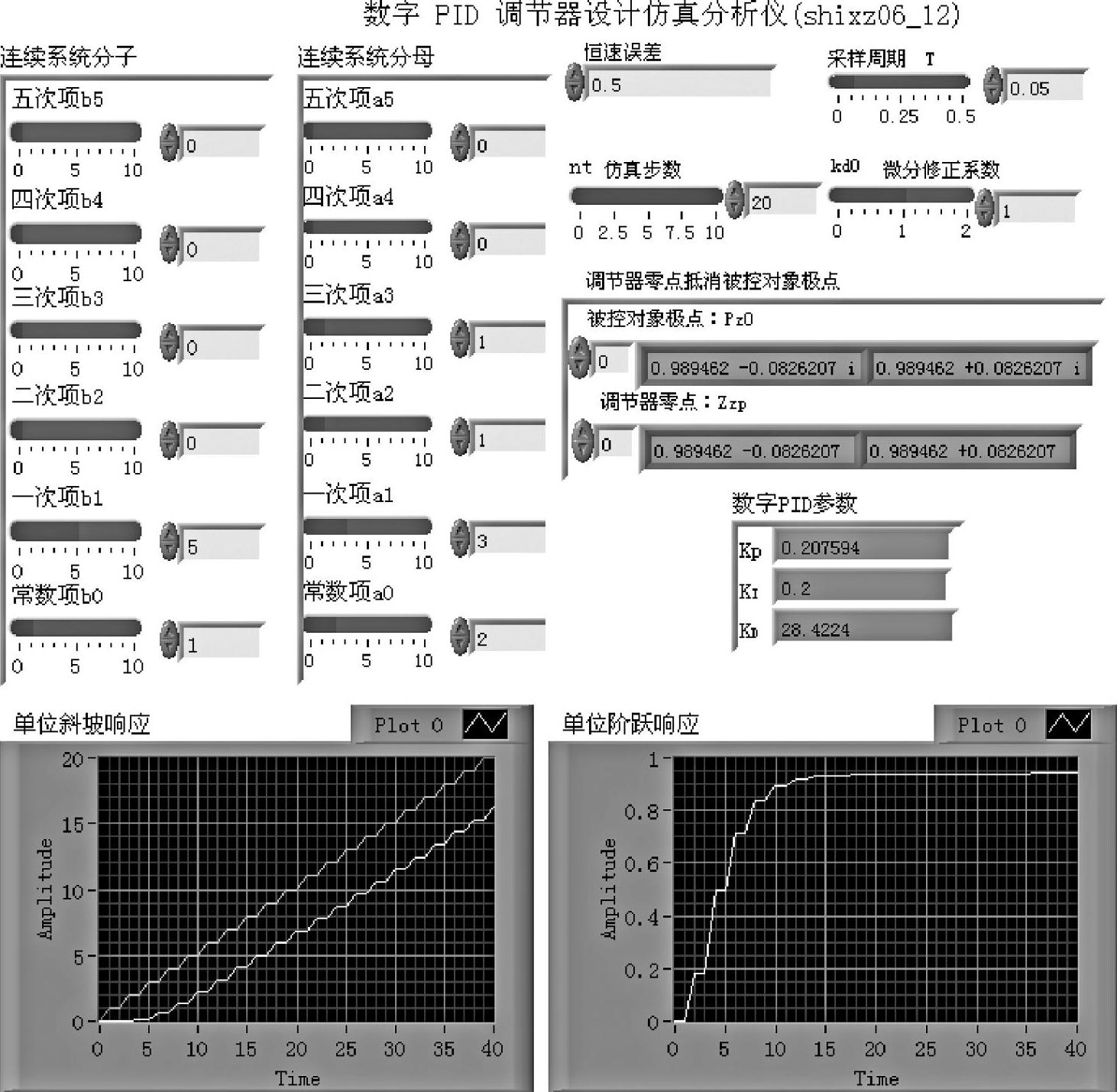
图6-5-2 程序shixz06_12前面板
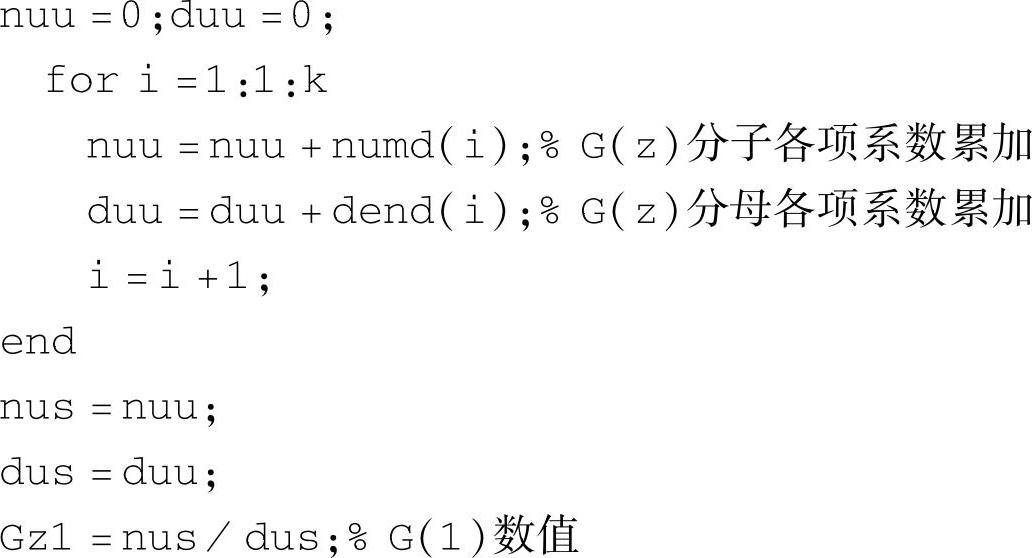
(1)离散化被控对象程序段
前面板由用户设定连续被控对象的传递函数,带零阶保持器离散化的程序段如下:
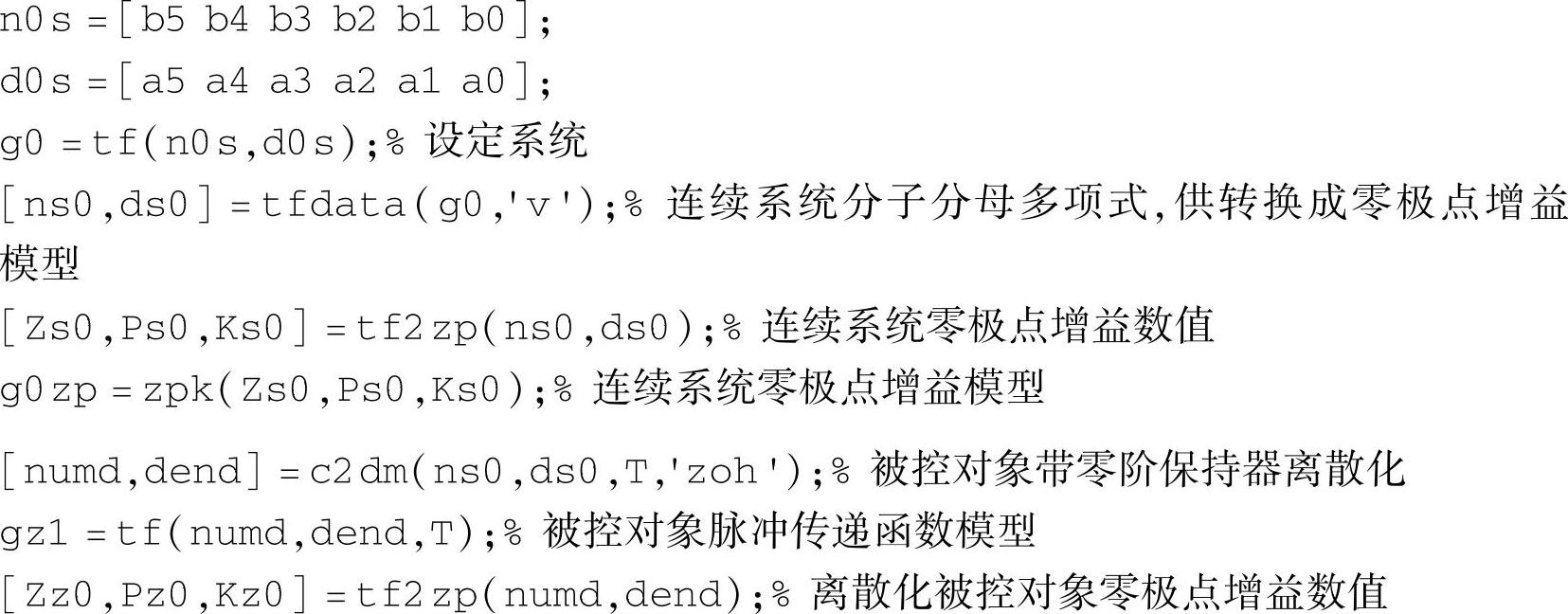

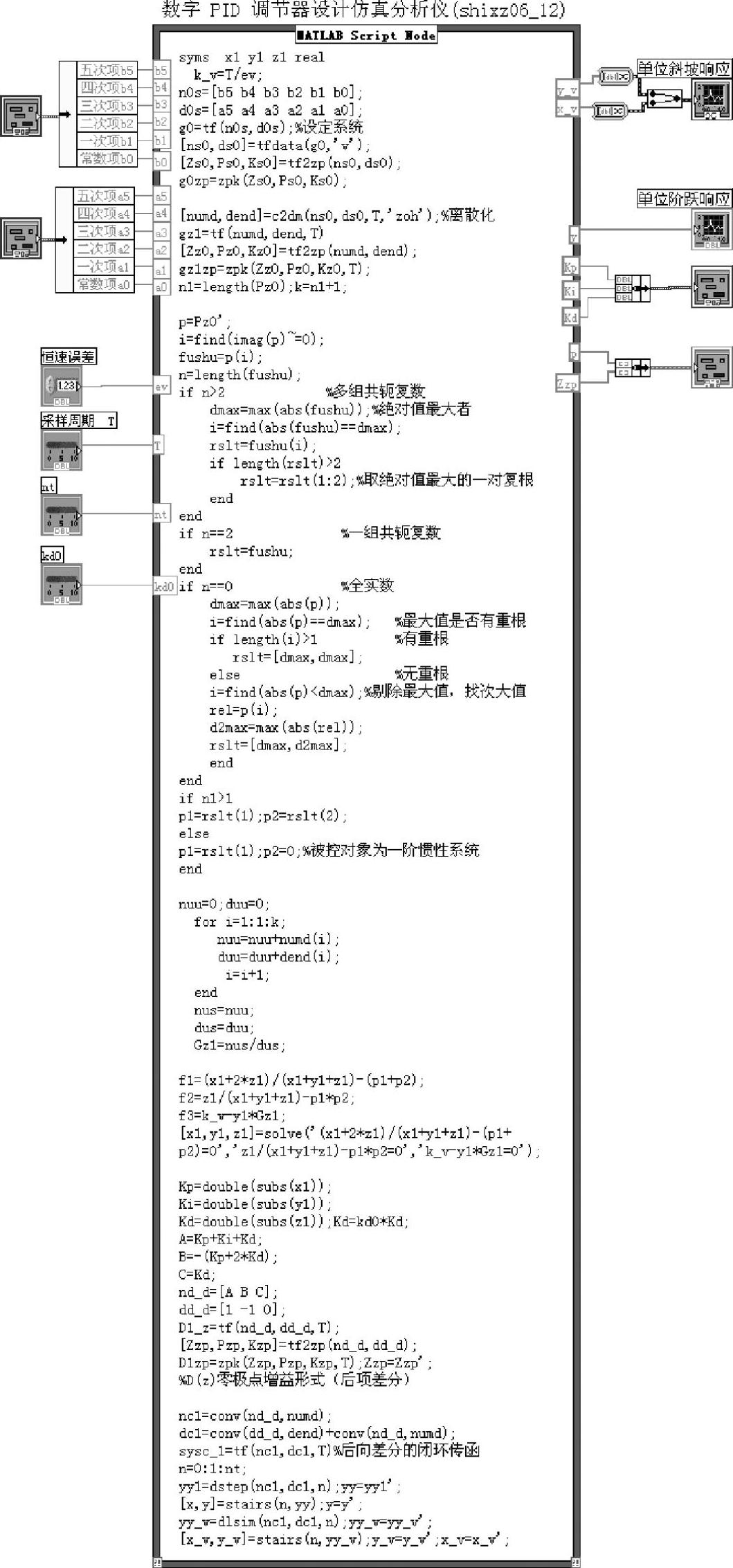
图6-5-3 程序shixz06_12框图面板
最后一句用于求被控对象极限。
运行后可得实例被控对象的连续(g0zp)和离散系统(构造gz1zp)

(2)取离散化被控对象极点程序段
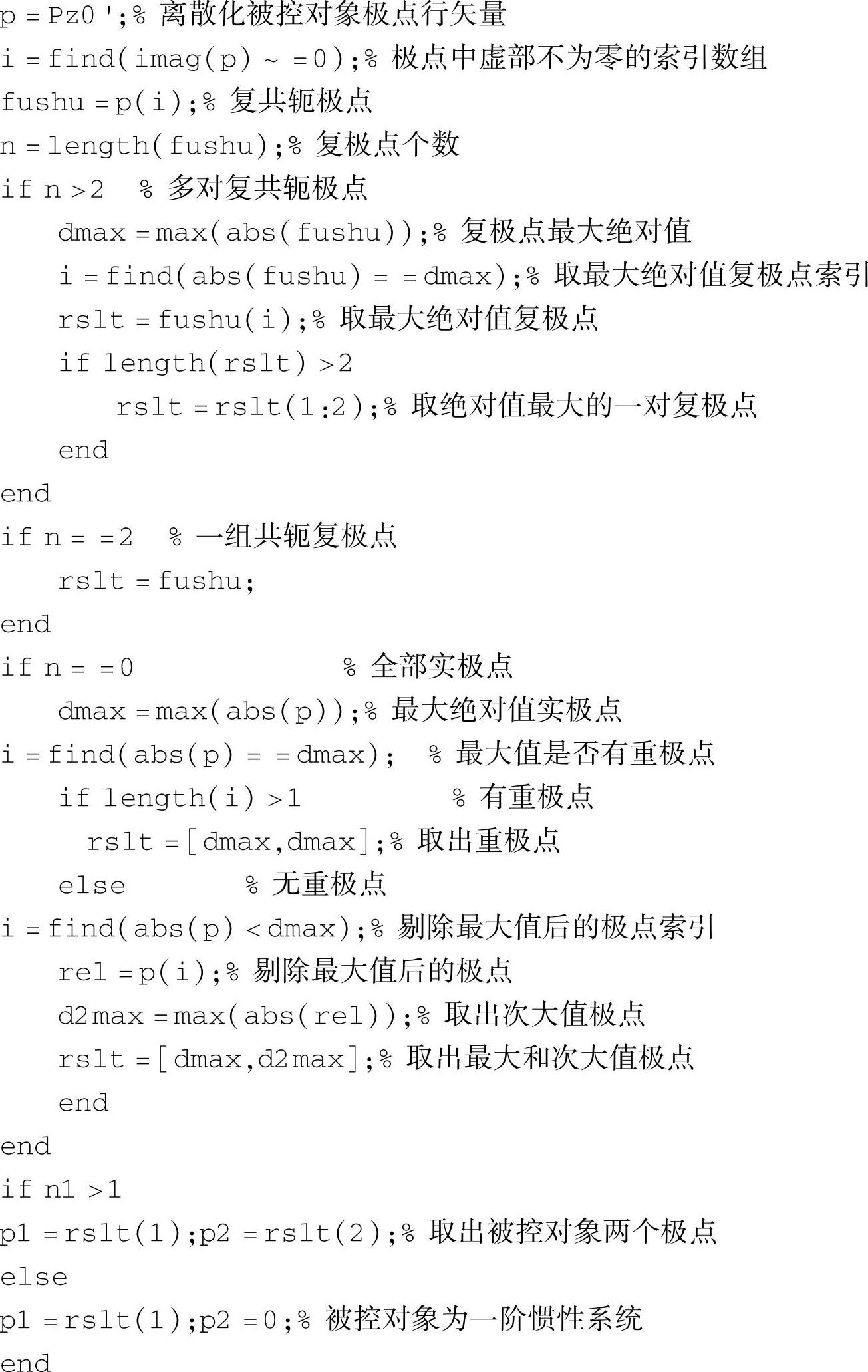
该程序段实现6.5.2节的设计步骤(4)。
运行后得p1=0.9895-0.0826i,p2=0.9895+0.0826 i,如图6-5-4所示。
(3)计算被控对象当z=1的值G(1),求出式(6-5-9)的极限值(https://www.xing528.com)
运行后得到G(1)=0.5000。
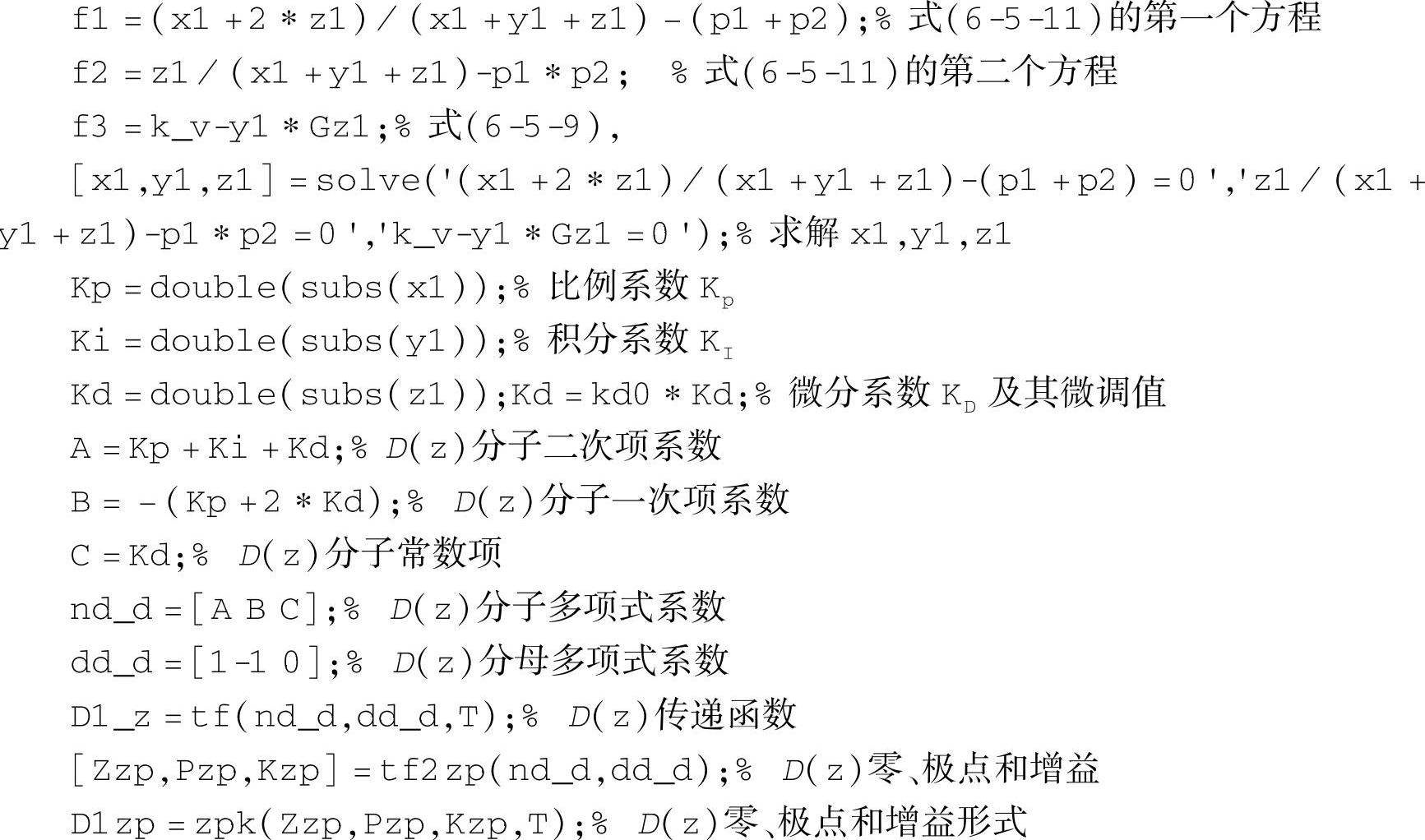
(4)求出由Kp,KD和KI构成数字PID调节器的程序段
在MATLAB符号工具箱下求解三元一次方程组,求解Kp,KD和KI。
运行后,数字PID(D1_z)参数如图6-5-5所示。PID调节器为

对比式(6-5-15)与式(6-5-14)的零极点相消情况。
(5)显示说明
参见图6-5-2,两个示波器屏幕分别显示恒速响应(含输入)和单位阶跃响应。前面板使用数组簇给出调节器零点和被控对象极点。实例被控对象是3阶,有3个极点,使用数组索引可以查看全部极点。PID调节器的两个零点都已显示,如图6-5-4所示。图6-5-5示出了后向差分调节器的参数。
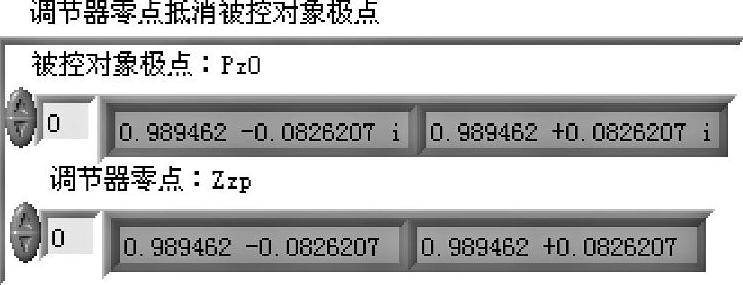
图6-5-4 调节器与被控对象的零极点对消
如果使用式(6-5-12)求解数字调节器D(z)的参数,程序如shixz06_12a所示。与shixz06_12十分相似,对同样的被控对象获得的PID参数只有Kp有些差别,如图6-5-6所示。

图6-5-5 数字PID的参数(积分取后向差分)
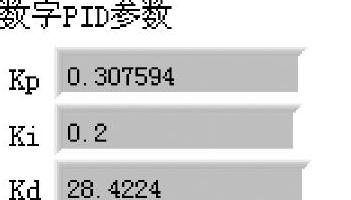
图6-5-6 数字PID的参数(积分取双线性变换)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。