



下面讨论两种PID校正仿真分析仪,即常规PID调节器解析设计仿真仪和改进型PID调节器图形设计仿真仪。
1.常规PID调节器解析设计仿真仪
【例6-10】常规PID调节器解析设计仿真分析仪。
使用解析方法设计常规PID调节器的仿真仪程序如shixz06_10所示。程序框图面板和前面板分别如图6-4-1和图6-4-2所示。
程序说明:
主要程序段是求解PID调节器的3个系数,即Ki,Kp和Kd。
(1)计算积分系数Ki的程序段
由式(6-4-7),计算积分系数Ki主要包括判断原待校正系统的型次及计算极限两部分。设待校正系统为最小相位系统,程序段如下:
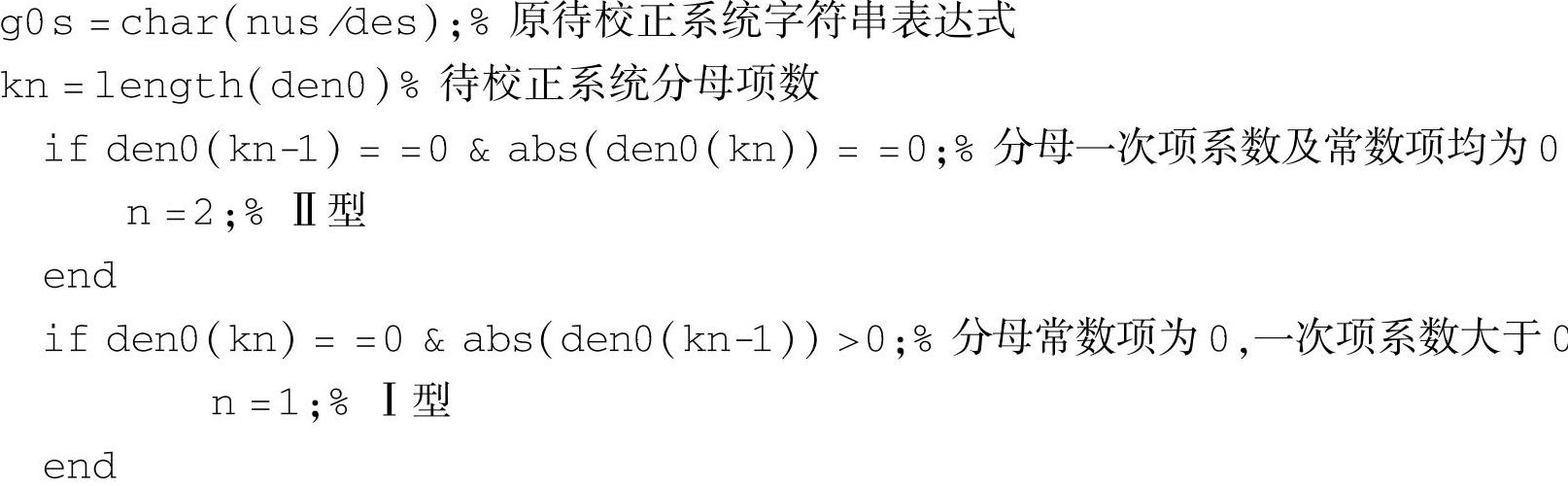
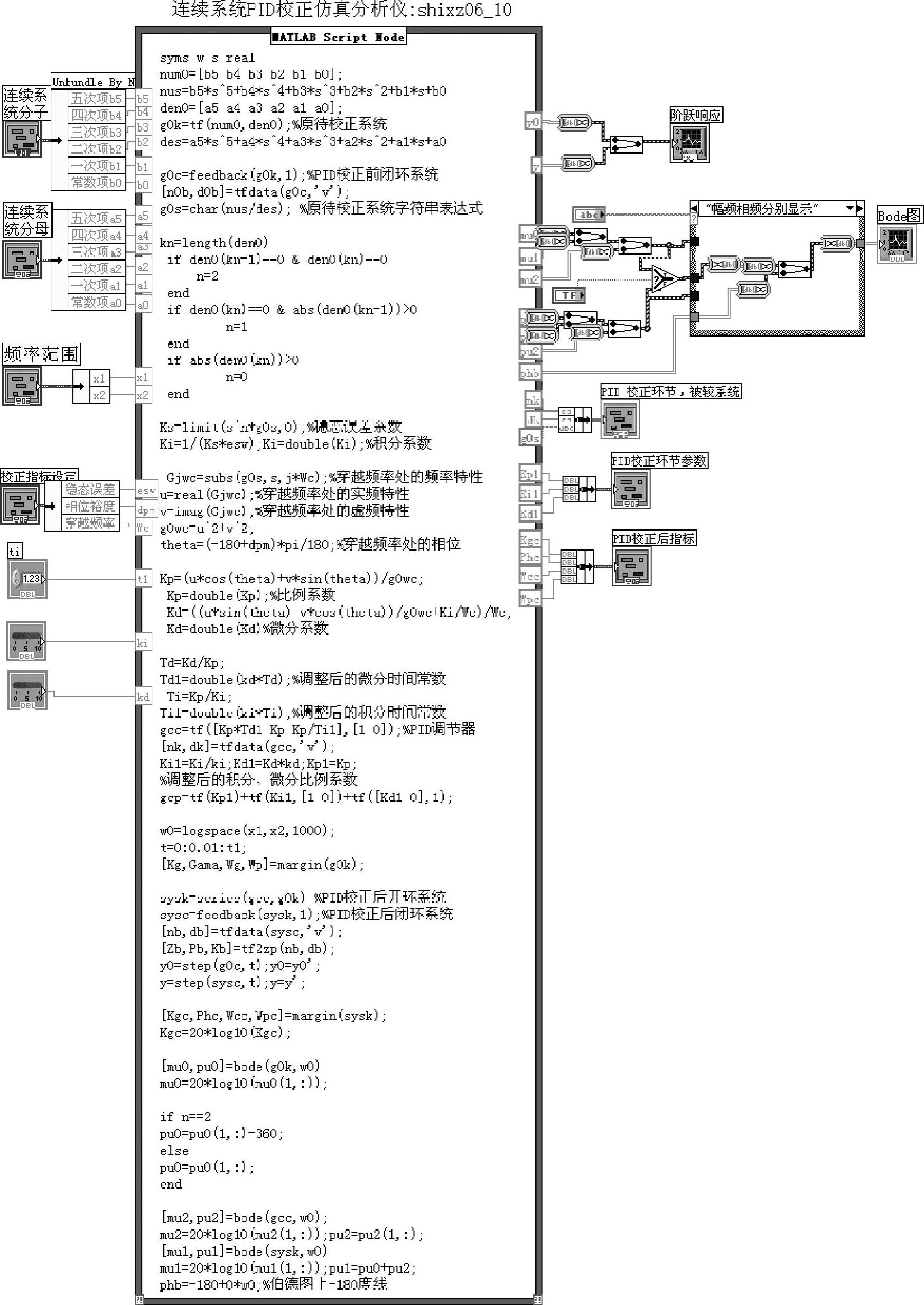
图6-4-1 程序shixz06_10框图面板
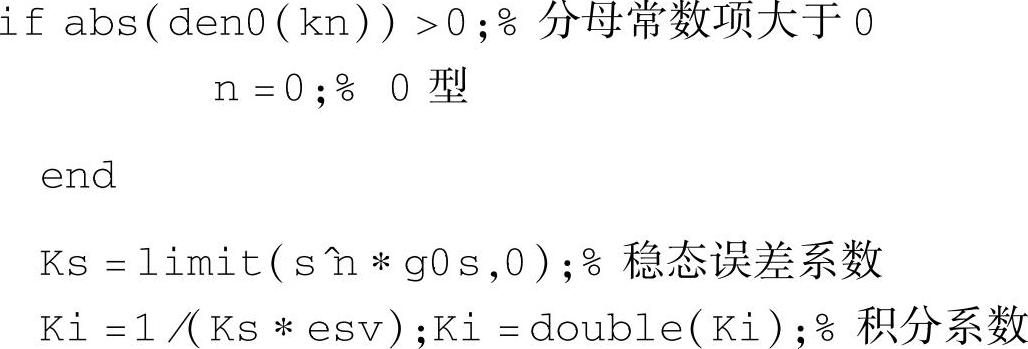
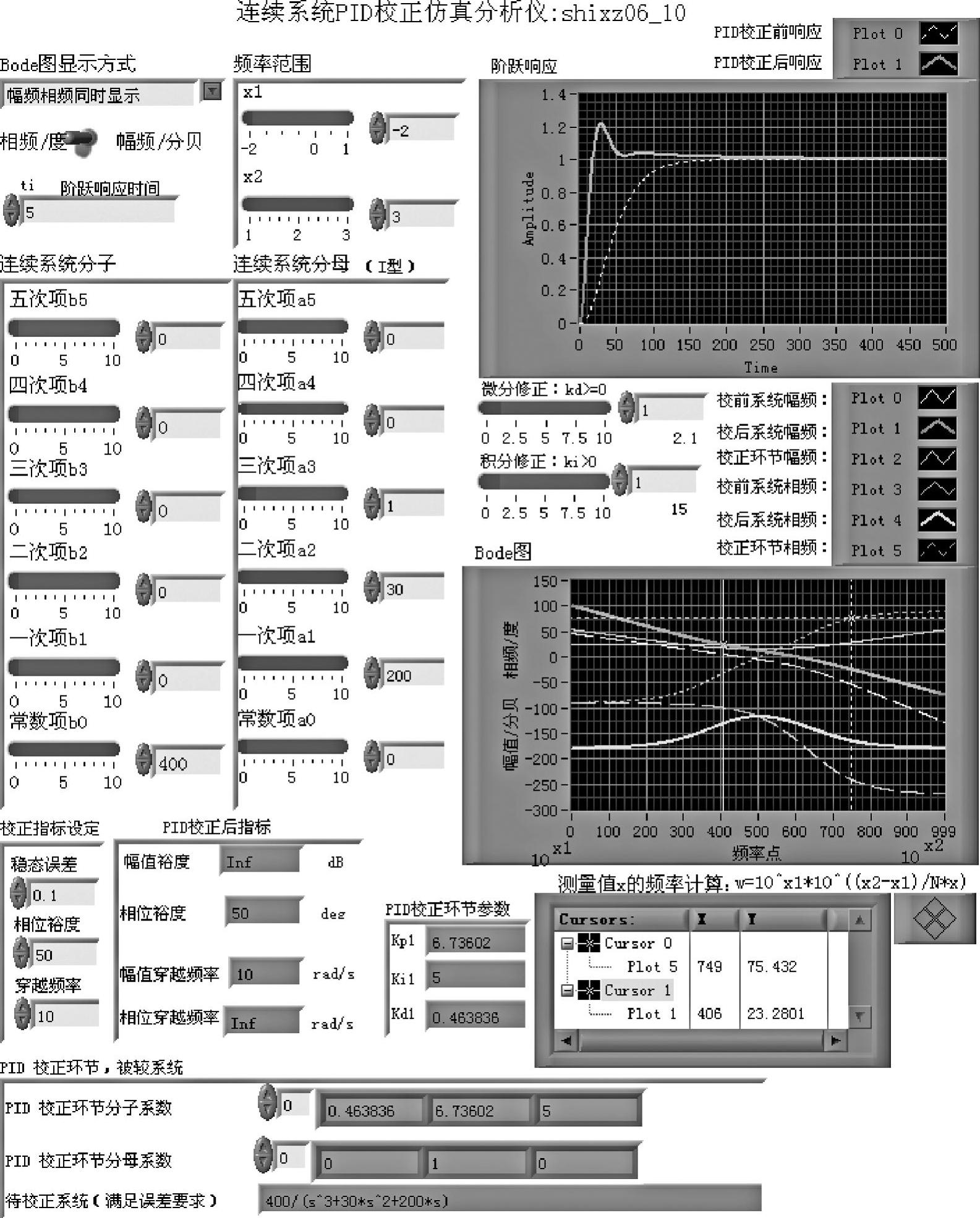
图6-4-2 程序shixz06_10前面板
程序段通过查看待校正系统分母的常数项和一次项是否为0来判断其型次:当常数项和一次项均为0时,原系统为Ⅱ型(n=2);当仅有常数项为0时,原系统为Ⅰ型;当常数项不为0时,原系统为0型。
极限计算语句“Ks=limit(s^n*g0s,0)”中的“g0s”,必须使用符号工具箱,参见图6-4-1。
(2)计算比例系数Kp和微分系数Kd的程序段
本段程序完成式(6-4-9)~式(6-4-15)的计算。语句命令如下:
(3)积分时间常数Ti和微分时间常数Td的计算及其调整
本仿真仪在计算出积分时间常数Ti和微分时间常数Td之后,利用前面板的控制节点对其进行调整,可以方便地研究PID调节器中,积分环节和微分环节对校正结果的影响。
程序中,前面板上的积分修正系数ki>0,ki越大,积分功能越弱。微分修正系数kd不小于0,当取kd=0时,微分环节不起作用,PID校正退化成PI校正。
请注意,最后进入PID调节器的各参数都是经过修正以后的参数。式(6-4-2)和式(6-4-3)的各种表达形式都是等价的,例如程序中的gcc和gcp完全相同。
(4)修正Ti,Td对校正结果的影响
解析方法设计PID调节器可以完全满足规定的设计指标,参见图6-4-2,在不对Ti,Td修正(ki=kd=1)时,校正后的相位裕度和幅值穿越频率与规定指标完全相同,但是校正后的单位阶跃响应曲线并不理想。通过使用前面板的控制节点连续改变修正系数kd和ki,对Ti,Td进行修正,可以进一步提高系统的动态性能,如图6-4-3所示。
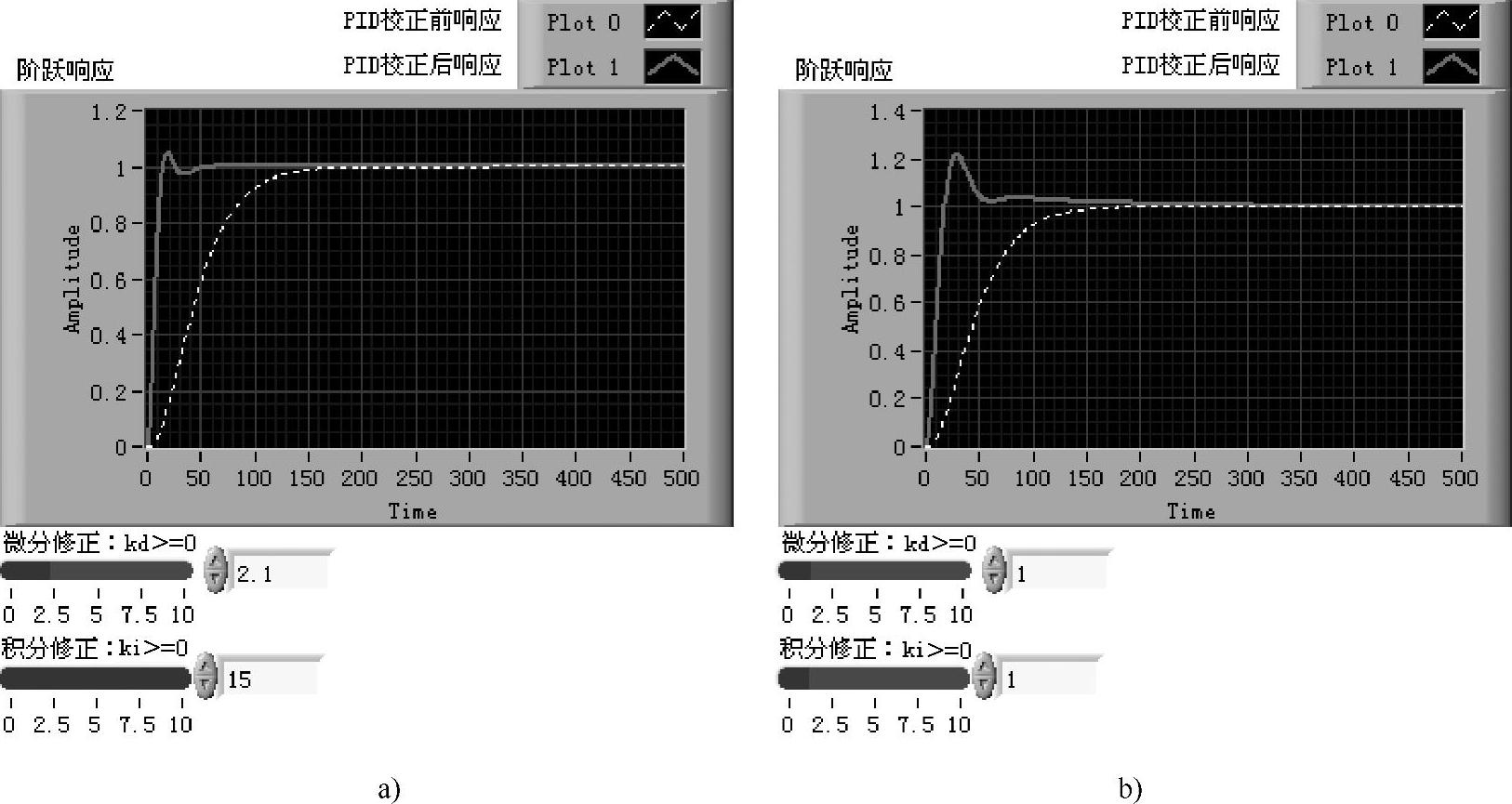
图6-4- 3修正Ti,Td对动态特性的影响
a)对Ti,Td进行修正 b)不对Ti,Td进行修正
修正后系统的超调明显下降,快速性明显提高。
分析一下Ti,Td修正前后系统闭环极点的分布,研究一下系统动态性能提高的机理。
修正前(ki=kd=1),仿真实例的各传递函数如下:
PID调节器(gcc)

校正后开环系统(sysk)

校正后为Ⅱ型系统,恒加速稳态误差为设计指标0.1,恒速输入和阶跃输入时为无差系统。
校正后闭环系统

闭环零极点分布
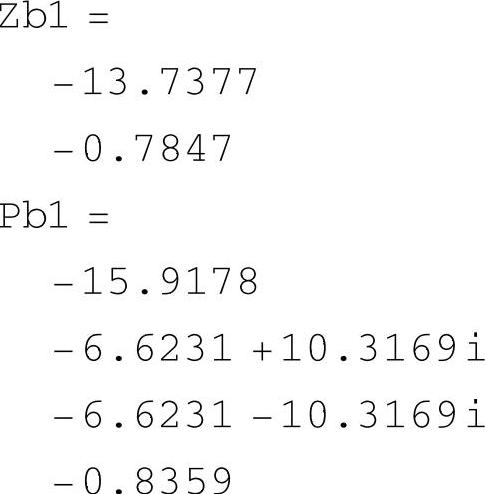
闭环零点完全由PID调节器的零点贡献。最靠近的零极点分别为-0.7847和-0.8359,相差约6%,不能进行零极点对消。
修正后(ki=15,kd=2.1),同一待校正仿真实例的各传递函数如下:
PID调节器

校正后开环系统

校正后闭环系统

闭环零极点分布
最靠近的零极点分别为-0.0498和-0.0500,二者相差约0.4%,可以进行零极点对消。对消后的闭环传递函数为

系统由4阶降成3阶。修正前后的相对稳定性指标如图6-4-4所示。相位裕度由50°提高到63.3604°,幅值穿越频率由10rad/s提高到14.3883rad/s,致使系统快速性和超调都有较大改善。
(5)关于Ⅱ型系统PID校正仿真的一些讨论
对Ⅱ型系统进行PID校正,获得的开环传递函数将含有3个积分环节,其伯德图相频曲线起始相位为-270°,在整个仿真频段可能只对-180°线相交一次(正穿越),因而出现两个特点。
第一,按照以往程序绘制伯德图,其相频曲线可能出现起始于正90°的问题,这是由于反正切函数主值限制所致。当使用以往的伯德图绘制程序(例如图6-3-10)对Ⅱ型系统

进行PID校正时,在其余参数不变的情况下,伯德图将如图6-4-5所示。系统式(6-4-23)和PID校正后系统(sysk)的相频曲线(plot3和plot4)分别起始于180°和90°,未能反映相频滞后的特征。
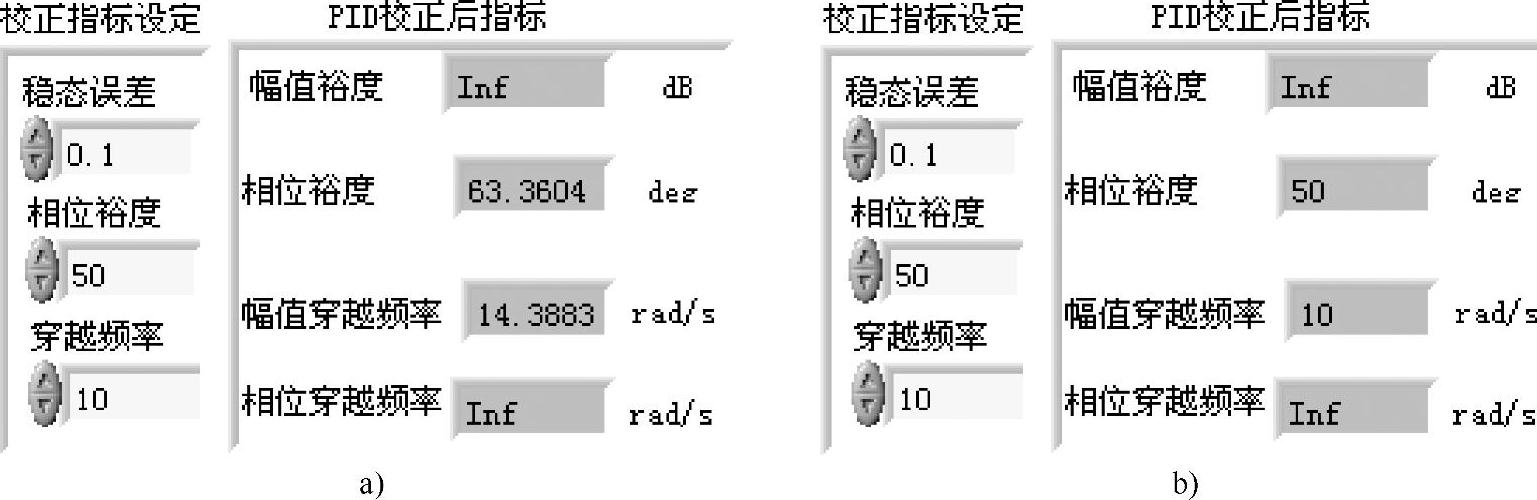
图6-4-4 修正Ti,Td对相对稳定性的影响
a)对Ti,Td进行修正 b)不对Ti,Td进行修正
为了避免这种情况,本仿真仪伯德图绘制程序添加了型次判断功能块:
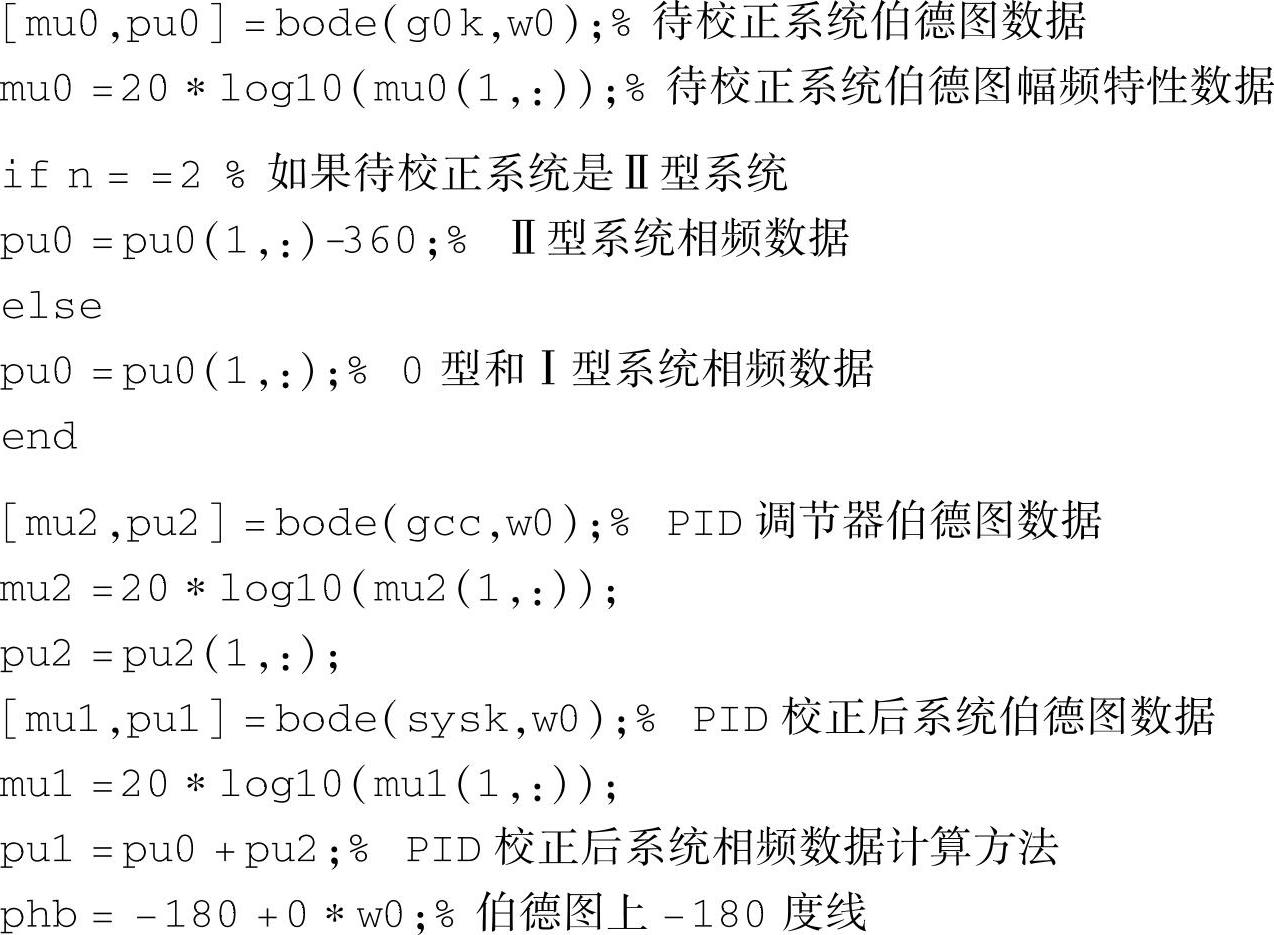
经过修改后,在同样条件下,系统式(6-4-23)校正前后的伯德图如图6-4-6所示。
在上述程序中,对Ⅱ型系统的相频数据使用减去360°的计算方法,同时,对于PID与原系统串联后的相频数据使用二者相频数据相加的计算方法。
第二,可能造成幅值裕度为负值,但系统却是稳定的矛盾情况,这方面请读者参考有关论著。不同的学者,对于稳定性的伯德判据尚有不同论述[12]。
对系统式(6-4-23)进行常规PID校正后的前面板如图6-4-7所示。
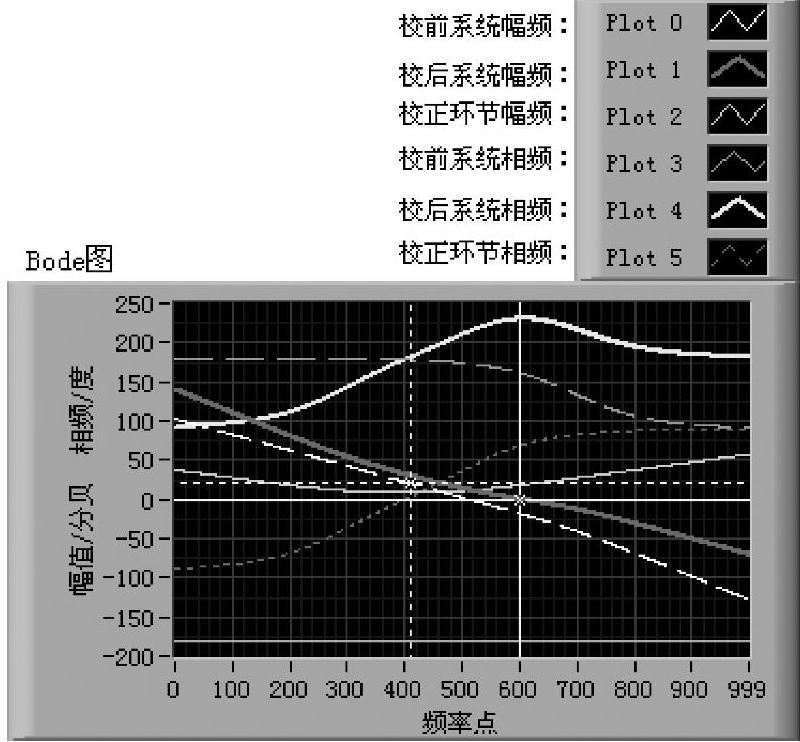
图6-4-5 不正确的Ⅱ型系统相频曲线图
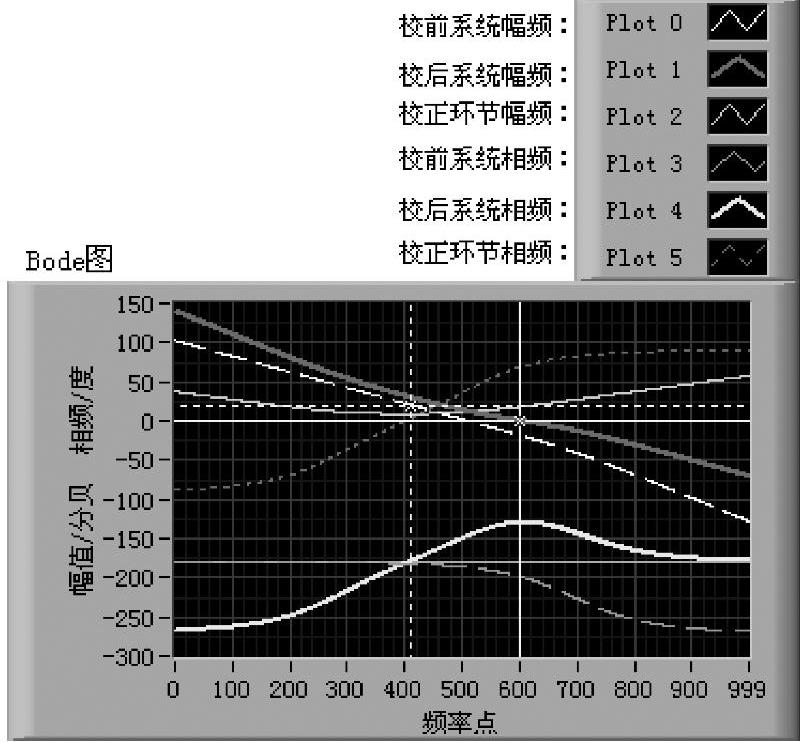
图6-4-6 正确的Ⅱ型系统相频曲线图
由图可见,系统式(6-4-23)经PID校正后,示出的幅值裕度为-30.47dB,参见图6-4-7“Bode图”中实线坐标系(cursor1)所示。这是使用命令margin(sysk)获得的,这表明命令“margin”所获得的结果判断系统稳定性有时会出现偏差。
分析图6-4-7的各传递函数,可以证明该系统校正前不稳定,经PID校正后系统稳定。
PID校正环节(gcc)

PID校正后系统开环传递函数(sysk)

校正后开环系统为Ⅲ型。
PID校正后系统闭环传递函数

PID校正后系统闭环零极点分布为
闭环极点全部处于复平面左边,而且具有零极点相消的条件。

图6-4-7 对系统式(6-4-23)的PID校正前面板
2.改进型PID校正设计仿真仪[13]
例6-10通过解析方法得到常规PID调节器的设计参数。在工程实用中,这种PID调节器有一定的局限,常常需要进行改进。下面介绍一种改进型PID校正设计仿真仪,并且利用虚拟仪器面板上的控件功能,直接使用仿真结果研究调节器参数对校正结果的影响,借助于图形方法,在获得优良控制效果的基础上获得改进PID调节器的参数。
设反馈控制系统框图如图6-4-8所示,图中Gc(s)采用图6-4-9不完全微分的改进型PID调节器。引入低通滤波器改进理想微分器,可以更好地抑制高频干扰,减弱对噪声的放大。
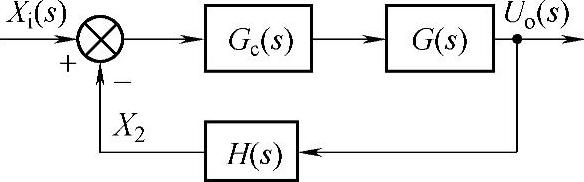
图6-4-8 反馈控制系统框图
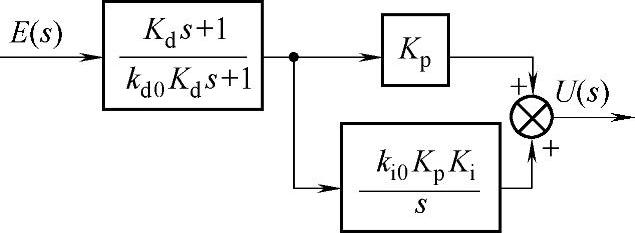
图6-4-9 改进型PID调节器框图
改进型PID调节器(图6-4-9)的传递函数为(https://www.xing528.com)

式中,Kp为比例系数;Kd为微分时间常数;Ki为积分时间常数的倒数;kd0是调节低通滤波器时间常数的系数;ki0为控制积分环节的常数,ki0=1表示投入积分环节,ki0=0表示切除积分。
通过参数选择与调整,式(6-4-27)(图6-4-9)可以构成多功能校正环节。其中包括不实施校正,采用P、PI、PD或PID等校正方法实施校正,简述如下:
1)当Kp=1,kd0=1,ki0=0时,式(6-4-27)为

比例、积分和微分环节均不投入。校正环节出现两对零极点对消,不起校正作用,便于研究被控对象校正前的特性。如果此时Kp不等于1,校正环节成为单一的比例(P)环节。
2)当ki0=0,Kp和kd0可调且不为1时,式(6-4-27)为

校正环节对消了原点处的零极点,成为带低通滤波器的比例微分(PD)调节器。调节Kp可以改变增益,调节kd0和Kd,特别是kd0,可以改变PD调节器的频率特性,从而改变其校正功能。为使PD调节器具有超前校正功能,应当使kd0在区间(0,1)之间可调。
3)当kd0=1,ki0=1,Kp可调,式(6-4-27)为

在对消了(-1/Kd)处的零极点之后,校正环节成为比例积分(PI)调节器。
4)当ki0=1,kd0≠1,Kp可调且不为1时,式(6-4-27)为

校正环节还原成完整的PID调节器,可调参数为4个。
改进型PID校正设计、仿真仪见例6-11。
【例6-11】采用不完全微分的改进型PID校正设计、仿真仪[13]。
不完全微分PID校正设计、仿真仪程序如shixz06_11所示。程序框图面板和前面板分别如图6-4-10和图6-4-11所示。
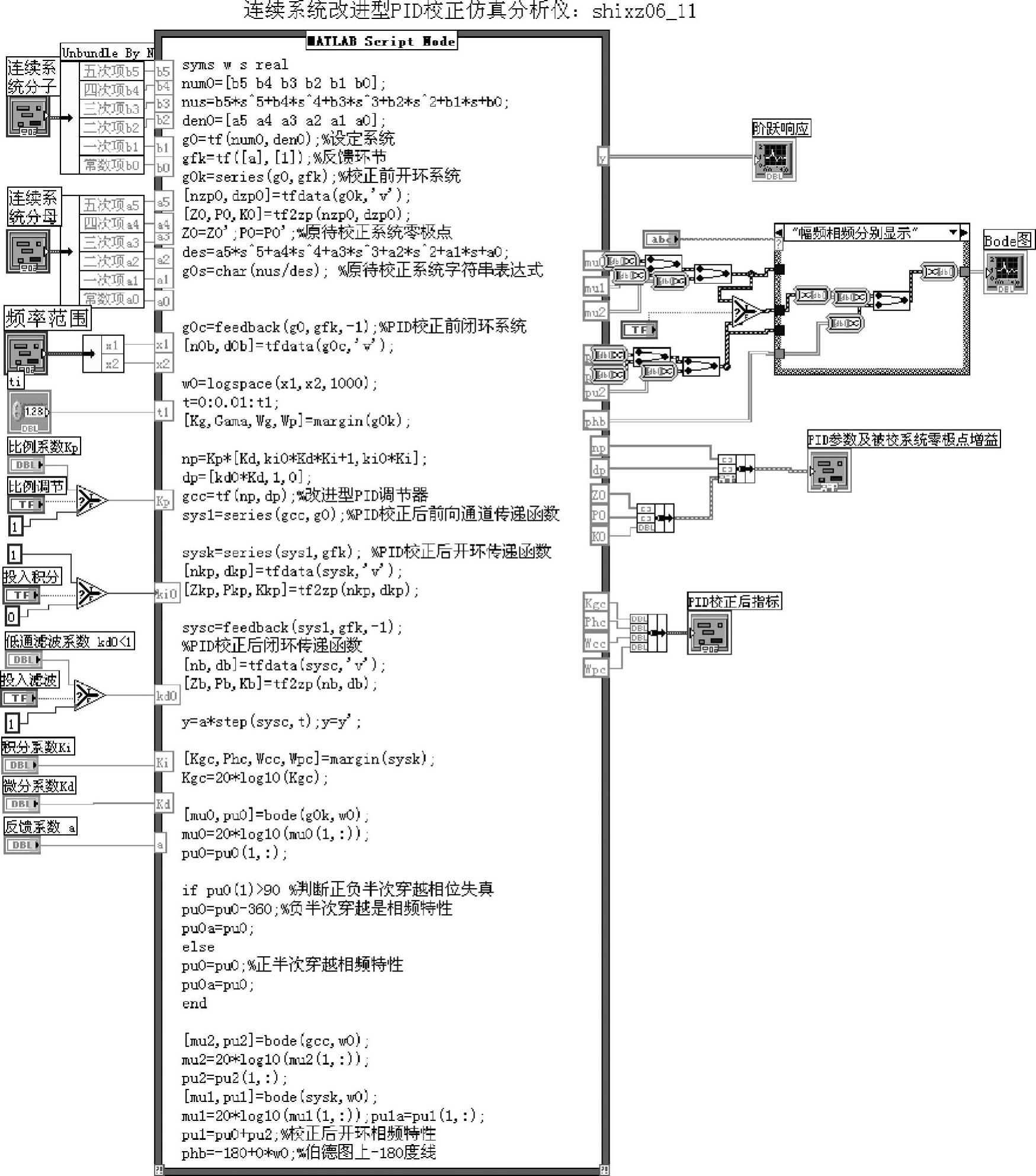
图6-4-10 程序shixz06_11框图面板
程序说明:
(1)PID调节器几种算法的切换
本仿真仪的主要特点是PID调节器的参数通过前面板的对应控件调节设定,主要控件包括3个选择开关和4个可调参数滑竿,参见图6-4-12。选择开关在程序面板中的输入接口如图6-4-13所示。
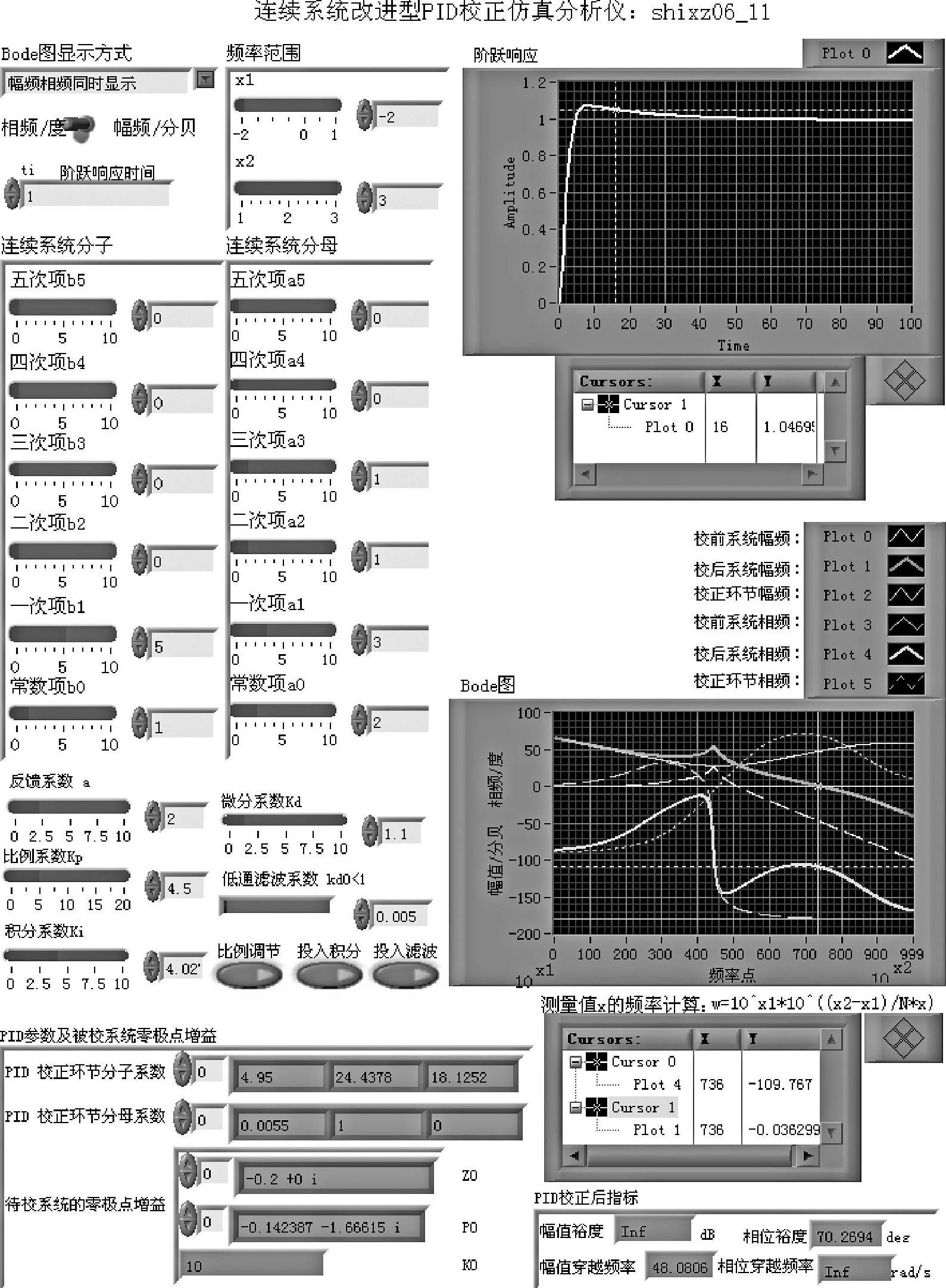
图6-4-11 程序shixz06_11前面板
图6-4-12中“比例调节,投入积分,投入滤波”3只开关有接通和断开两种状态,当开关上的小绿灯点亮时表接通,熄灭时表断开。
完整的PID校正:3只开关均接通。“投入积分”使ki0=1,“比例调节”和“投入滤波”分别使比例系数Kp和低通滤波系数kd0可调。
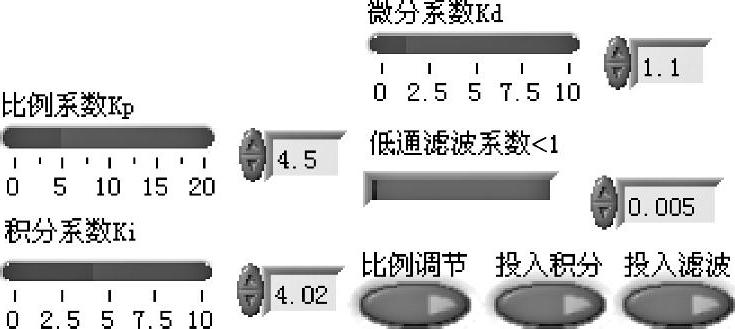
图6-4-12 PID校正方式及参数调节控件
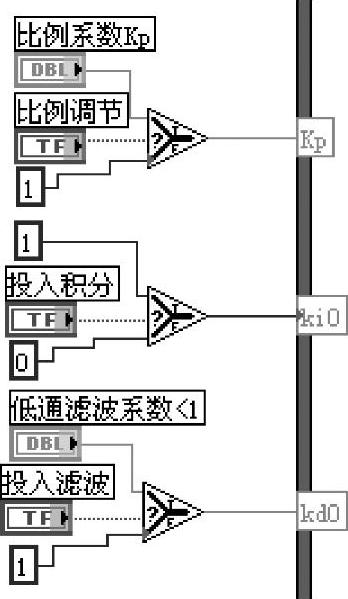
图6-4-13 选择开关的输入接口
PI校正:“投入滤波”开关断开,使kd0=1,低通滤波系数不可调;“比例调节,投入积分”两只开关接通,使ki0=1,构成式(6-4-30)的PI调节器。
PD校正:“投入积分”开关断开,使ki0=0,积分环节不起作用;“比例调节,投入滤波”两只开关接通,使Kp,kd0和Kd可调,构成如式(6-4-29)的PD调节器。
(2)部分语句说明
改进型PID传递函数、校正后系统开环传递函数和系统闭环传递函数的构成语句如下:
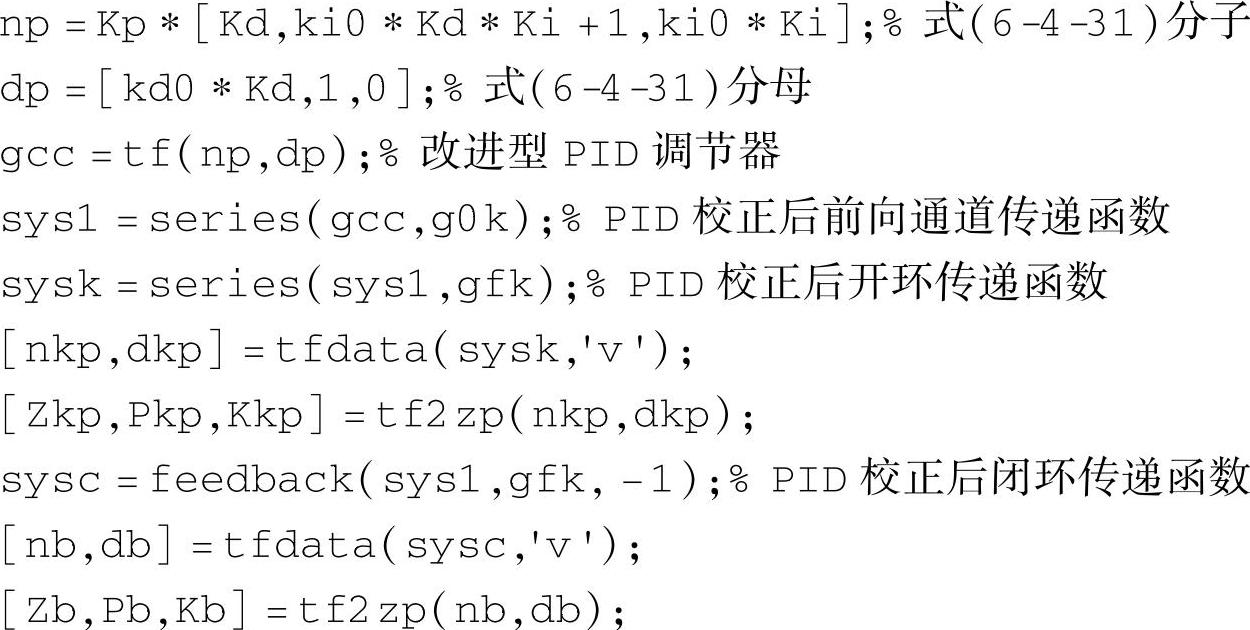
由于系统反馈环节(gfk)可以设定,开环传递函数与前向通道传递函数不一定相等,语句中sys1表示前向通道传递函数,sysk表示开环系统传递函数(参见图6-4-8)。
程序还给出了待校正系统、前向通道传递函数和开环传递函数的零极点增益模型,以便判断最小相位系统与非最小相位系统。
仿真发现,对于Ⅱ型系统中的负半次穿越,MATLAB命令所绘制的伯德图的纵坐标表达为相位超前(示数为正)。设Ⅱ型系统的频率特性为

当系统中T1<T2,导前环节的转角频率大于惯性环节的转角频率(ωc1=1/T1>ωc2=1/T2)时,惯性环节相位滞后作用先于导前环节相位超前作用,总体效果滞后。对数相频曲线起始于-180o,并且构成负半次穿越。以T1=5,T2=10为例有

对系统(6-4-33)使用命令bode所编写的相频特性曲线语句为
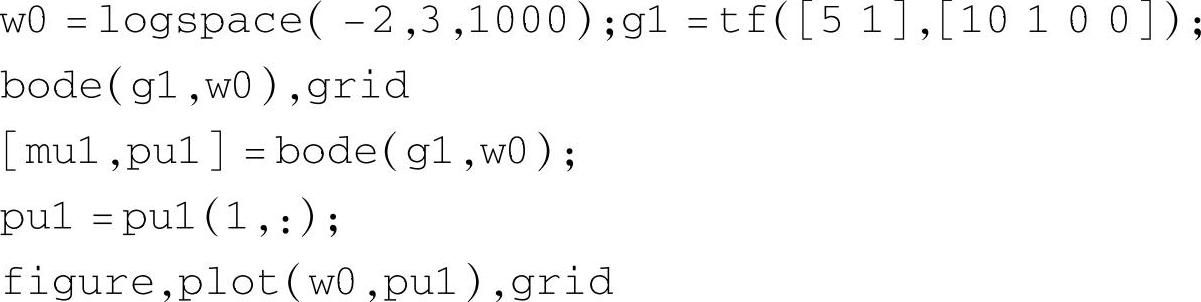
得到对数相频特性曲线如图6-4-14所示。曲线纵坐标示数为正相位,不能真实反映式(6-4-33)
总体的相位滞后和起始负半次穿越的相频特性。
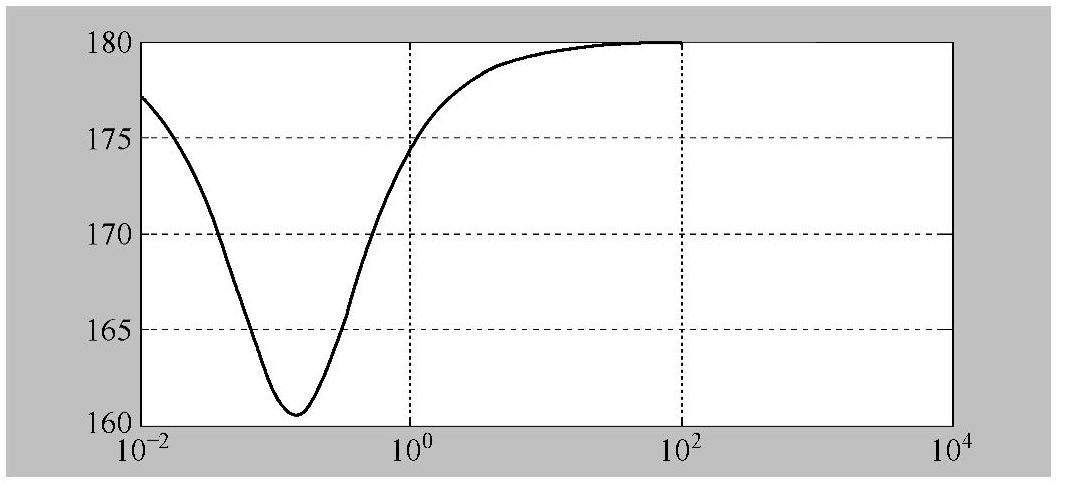
图6-4-14 bode命令未能正确反映Ⅱ型系统式(6-4-33)相频特性
本仿真仪对此段程序进行如下修改:
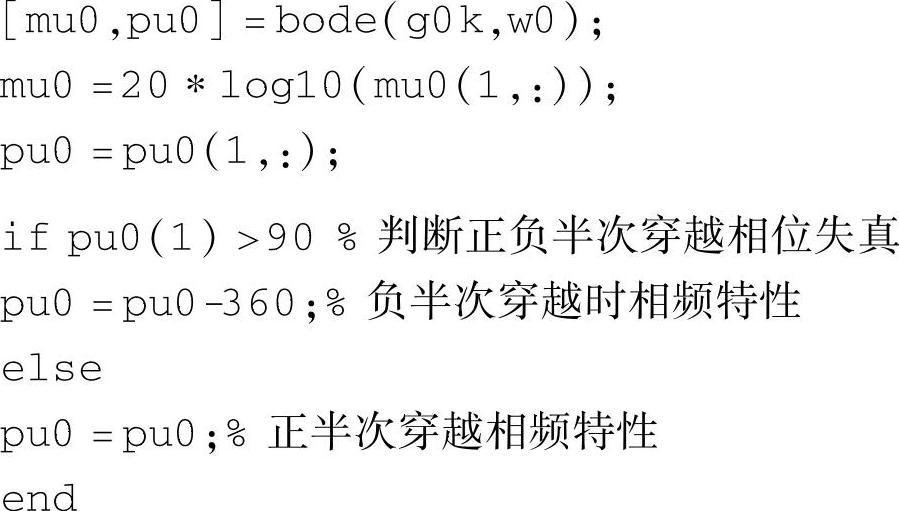
将系统式(6-4-33)输入仿真仪shixz06_11,运行后得到如图6-4-15所示的对数相频特性曲线,能够正确反映滞后和负半次穿越的特征。
(3)仿真实例的传递函数
校正前的系统开环传递函数(g0k)

校正前的系统闭环传递函数(g0c)

注意反馈系数为2。
改进型PID调节器(gcc)

校正后系统开环传递函数(sysk)

采用幅频、相频分别显示方式校正前系统,PID校正环节和校正后开环系统的相频曲线如图6-4-16。
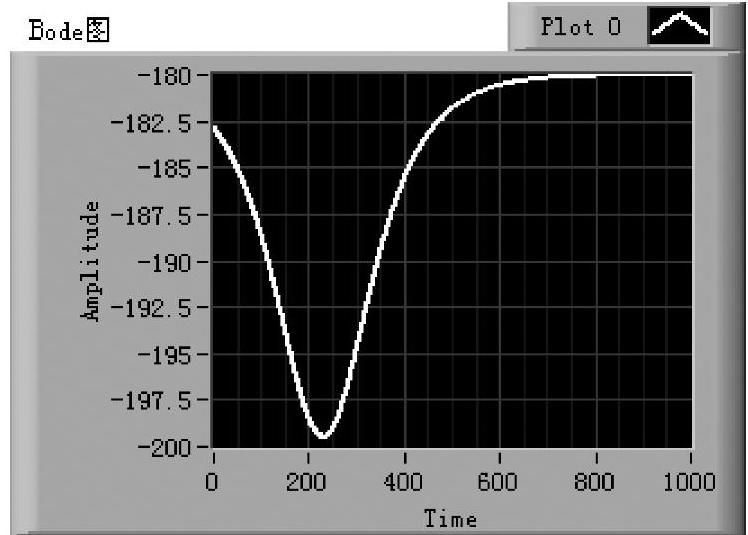
图6-4-15 Ⅱ型系统式(6-4-33)的负半次穿越相频特性曲线
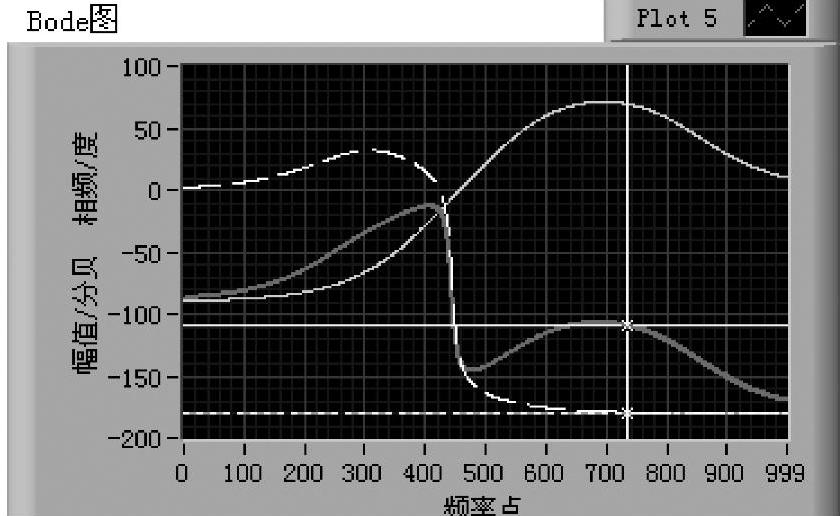
图6-4-16 PID校正环节和校正后开环系统的相频曲线
图中虚线为校正前系统式(6-4-34)相频特性曲线,PID校正环节显示出滞后超前相频特性,校正后开环系统式(6-4-35)相频特性起始于-90°,终止于-180°。
校正后系统闭环传递函数(sysc)

作为对比,图6-4-17给出图6-4-11仿真实例校正前后系统的单位阶跃效应曲线。
图6-4-17 校正前后单位阶跃效应曲线对比
a)校正前 b)校正后
(4)仿真结果的显示与直接测量
仿真仪前面板上提供的数字显示器可以直接显示仿真结果,也可以使用前面板上示波器内的测量坐标对仿真结果进行测量,参见图6-4-11。
PID调节器参数和待校系统零极点增益数字显示器簇如图6-4-18所示。
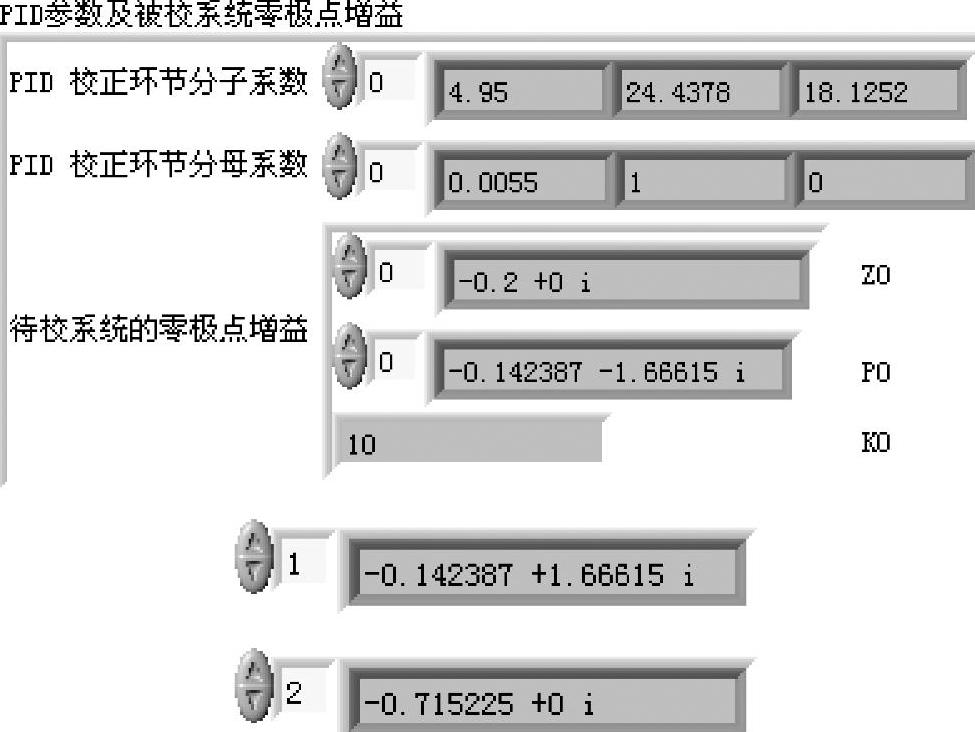
图6-4-18 PID调节器参数和待校系统零极点增益数字显示器簇
PID算法与式(6-4-31)一致。根据使用者在前面板上选择调整的参数,参数由算法式(6-4-31)决定。
“待校系统的零极点增益”显示的是校正前系统开环传递函数(g0k)(式6-4-34)的数据(参见图6-4-8)。注意图6-4-18中极点只显示了一个数值,其余两个极点可以通过改变簇的数组索引得到。
由坐标系测量校正后系统时域性能指标如下:峰值时间为0.08s,超调约为7%,当规定误差带为±5%时,调整时间为0.16s。可见,校正后系统时域性能有很大提高。
由坐标系测量部分频域性能指标如下:将图6-4-11的幅值穿越频率代入起始和终止频率点,幅频曲线穿越0dB线的频率点736,得

相位裕度γ=180°-109.77°=70.23°,结果和数字指示器之间的误差在允许范围之内。
作为对比,此处研究一个非最小相位系统的仿真结果。
在仿真仪上输入原始开环系统

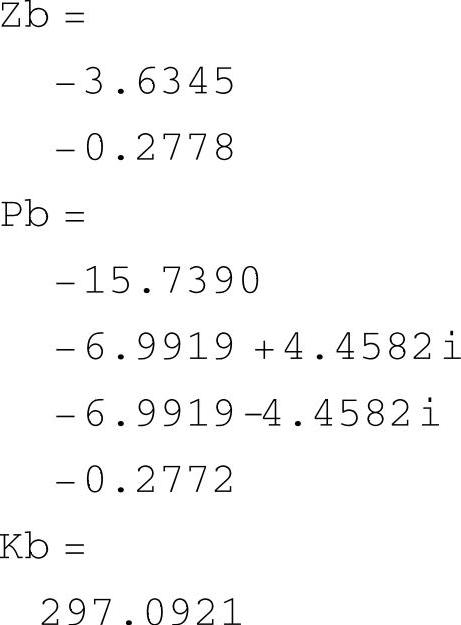
得到系统对数相频特性曲线如图6-4-19所示,待校正系统零极点增益如图6-4-20所示。
分别对比图6-4-19与图6-4-16,图6-4-20与图6-4-18,由于非最小相位系统式(6-4-39)有一对正实部共轭极点,因此总体相位超前。
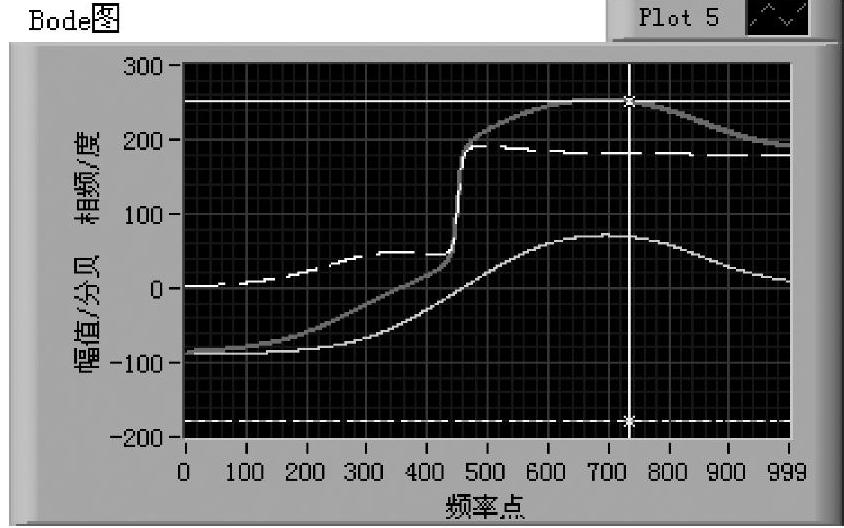
图6-4-19 非最小相位系统的相频特性曲线
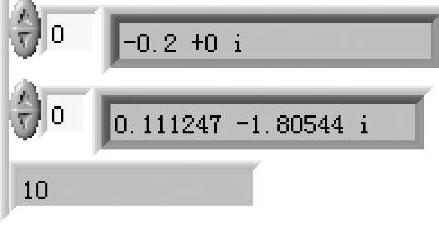
图6-4-20 非最小相位系统的零极点增益
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。