



(1)满足稳态恒速误差要求的0型系统的滞后—超前校正
【例6-8】满足稳态恒速误差要求的0型系统滞后—超前校正仿真分析仪。
满足稳态恒速误差要求的0型系统滞后—超前校正程序如shixz06_08所示。程序框图面板和前面板分别如图6-3-7和图6-3-8所示。
程序说明:
如前所述,给出稳态恒速误差的0型待校正系统,需要校正环节含有积分因子。为了方便,可将校正环节内的积分因子纳入待校正系统之中,使问题仍然归于Ⅰ型系统的滞后—超前校正。除了将待校正系统变为Ⅰ型系统之外,其余程序与例6-7相同,只是校正后系统比待校正系统高出了二阶。
实例的原0型系统(g0)为

考虑恒速误差指标后的实际被校正系统(g0k1)为

显然,待校正系统由3阶变成了4阶,由0型变成了Ⅰ型。系统的稳态恒速误差由无穷大变为evs=1/100=0.01。当然,如果不加校正,式(6-3-17)所对应的闭环系统是不稳定的。
滞后校正环节(gc2)为

式中,β=65.4997;ωgcn=1.3612.实例取kT=5.6,T2=kT/ωgcn=4.114s。
超前校正环节(gc1)为

其中,选取kcg=0.1,T1=kcg*T2=0.4114s。
滞后—超前校正环节(gcc)为

滞后校正后的开环系统(sysk2)为
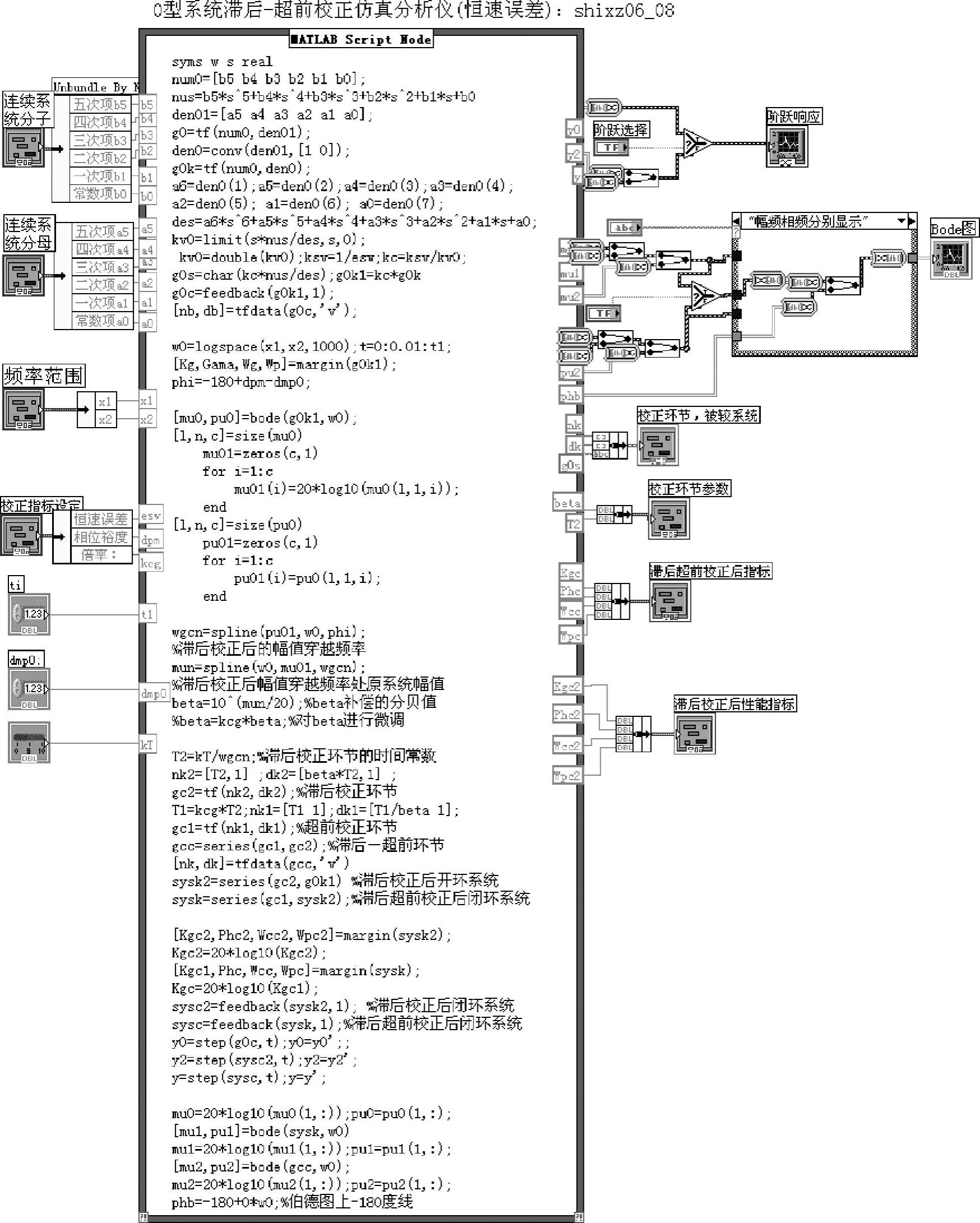
图6-3-7 程序shixz06_08框图面板

图6-3-8 程序shixz06_08前面板

滞后校正后的闭环系统(sysc2)为

滞后校正后的频域相对稳定性指标重新示于图6-3-9中。数据表明,进行滞后校正后其幅值穿越频率(1.37709rad/s)已经小于相位穿越频率(2.08703rad/s),系统已经由不稳定变成稳定。但幅值裕度仅为5.68997dB,相位裕度仅为24.4808°,不满足设计指标要求,由其单位阶跃响应曲线可见系统动态特性较差,还需进行超前校正。

图6-3-9 滞后校正系统的相对稳定性指标数据
滞后—超前校正后的开环系统(sysk)为

滞后—超前校正后的闭环系统(sysc)为

在滞后校正基础上再进行超前校正,构成完整的滞后—超前校正后,系统相对稳定性指标重新示于图6-3-10中。和图6-3-9所示数据相比,有很大改善,幅值裕度增加到32.6988dB,相位裕度增加到50.2508°,动态性能有较大改善,参见图6-3-11中的两条阶跃响应曲线。

图6-3-10 例6-8滞后超前校正后频域性能

图6-3-11 例6-8滞后校正和滞后超前校正动态性能比较
(2)满足稳态位置误差的0型系统的滞后—超前校正
【例6-9】满足稳态位置误差要求的0型系统滞后—超前校正仿真仪。(https://www.xing528.com)
满足稳态位置误差要求的0型系统滞后—超前校正仿真仪程序如shixz06_09所示。程序框图面板和前面板分别如图6-3-12和图6-3-13所示。
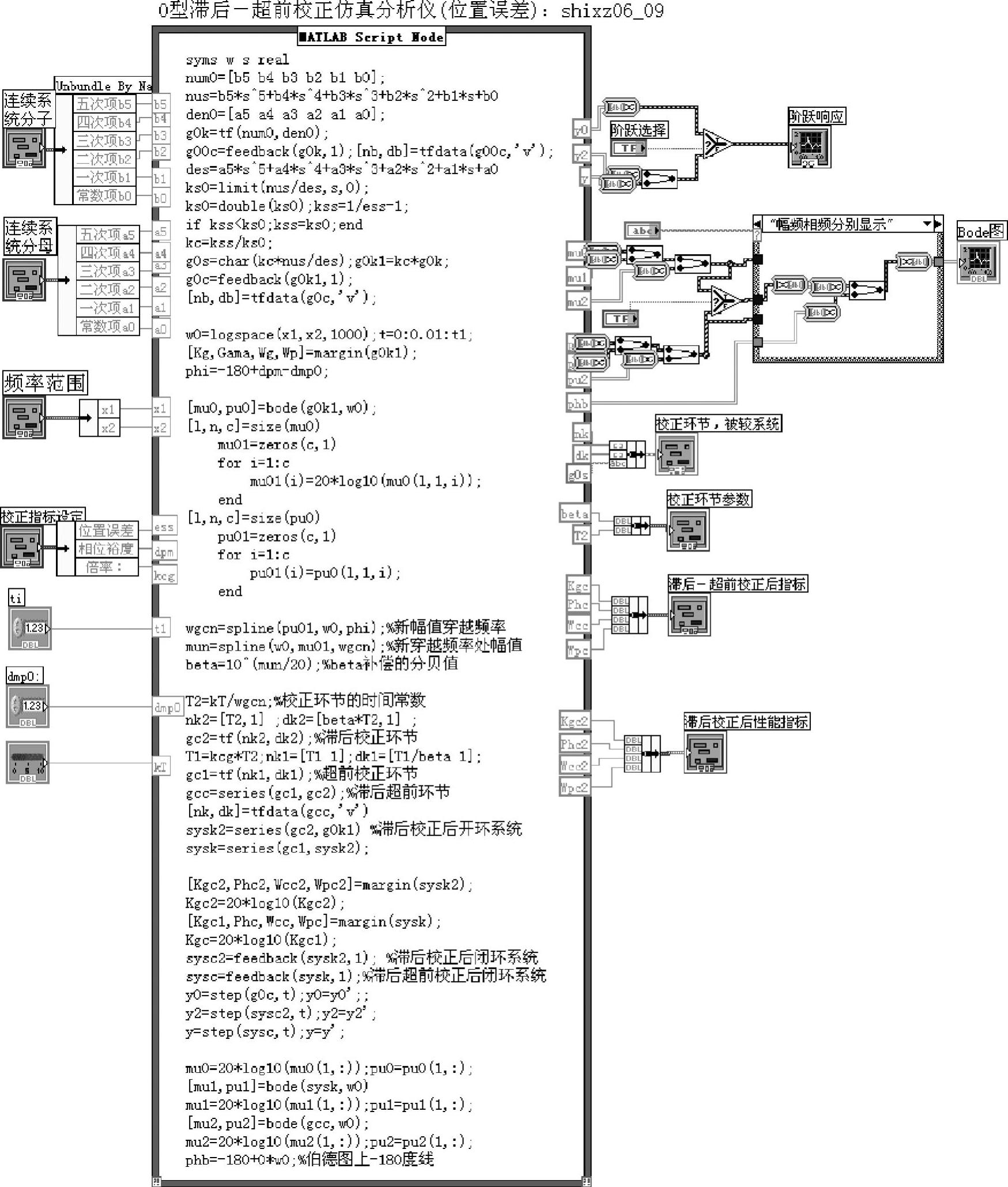
图6-3-12 程序shixz06_09框图面板

图6-3-13 程序shixz06_09前面板
程序说明:
满足校正后稳态位置误差的程序段说明见例6-3,滞后—超前校正部分的程序见例6-7,仿真实例模型如下:
原始待校正0型系统(g0k)为

显然,系统稳态位置误差为1/(1+1)=0.5,不满足设计要求。
考虑稳态位置误差指标后的实际被校正系统(g0k1)为

增益的提高,使得稳态位置误差变为1/(99+1)=0.01,满足设计指标要求。当然,如果不加校正,式(6-3-26)所对应的闭环系统是不稳定的。
滞后校正环节(gc2)为

式中,β=18.4426;ωgcn=37.9701。实例取kT=6,T2=kT/ωgcn=0.158s。
超前校正环节(gc1)为

其中,选取kcg=0.1,T1=kcg*T2=0.0158s。
滞后—超前校正环节(gcc)为

滞后校正后的开环系统(sysk2)为

滞后校正后的稳态位置误差与式(6-3-26)相同。此时系统已经稳定,可以计算稳态误差。
滞后校正后的闭环系统(sysc2)为

滞后校正后的频域相对稳定性指标重新示于图6-3-14中。数据表明,进行滞后校正后其幅值穿越频率(38.3176rad/s)已经小于相位穿越频率(56.6957rad/s),系统已经由不稳定变成稳定。但幅值裕度仅为5.69066dB,相位裕度仅为26.4854°,不满足设计指标要求,由其单位阶跃响应曲线可见系统动态特性较差,还需进行超前校正。

图6-3-14 例6-9滞后校正后系统的相对稳定性数据
滞后—超前校正后的开环系统(sysk)为

滞后—超前校正后的闭环系统(sysc)为

在滞后校正基础上再进行超前校正,构成完整的滞后—超前校正后,系统相对稳定性指标重新示于图6-3-15中。和图6-3-14所示数据相比,有很大改善,幅值裕度增加到13.8479dB,相位裕度增加到50.8188°,动态性能有较大改善,参见图6-3-16中的两条阶跃响应曲线。
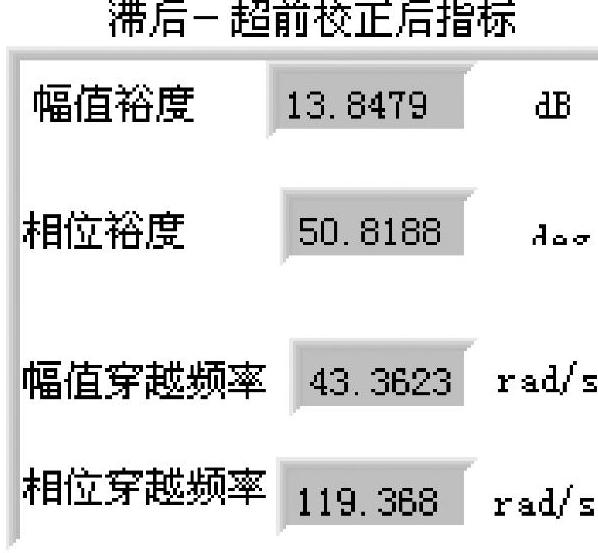
图6-3-15 例6-9滞后超前校正后频域性能
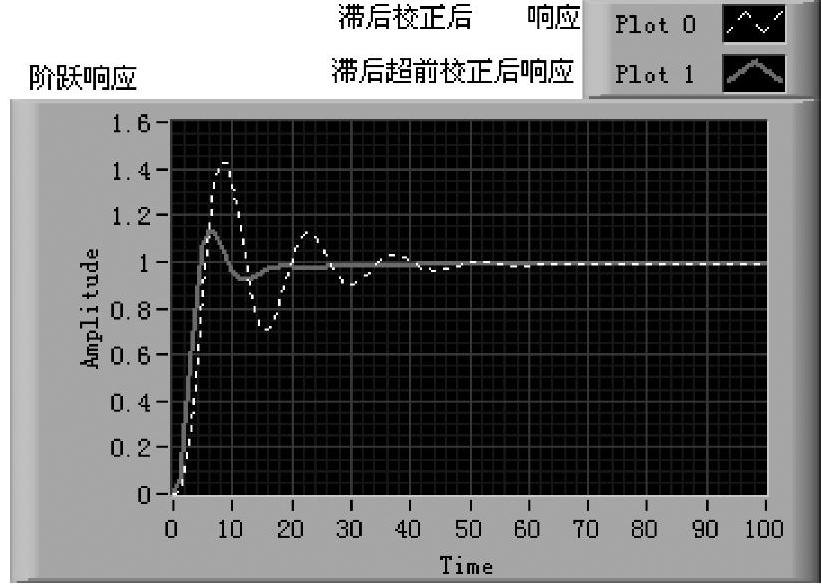
图6-3-16 例6-9滞后校正和滞后超前校正动态性能比较
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。