



【例2-6】二阶控制系统典型输入响应仿真仪。
对式(2-3-1)的二阶控制系统典型输入响应进行仿真。仿真程序如shixz02_06所示,其程序框图面板及前面板分别如图2-3-2和图2-3-3所示。
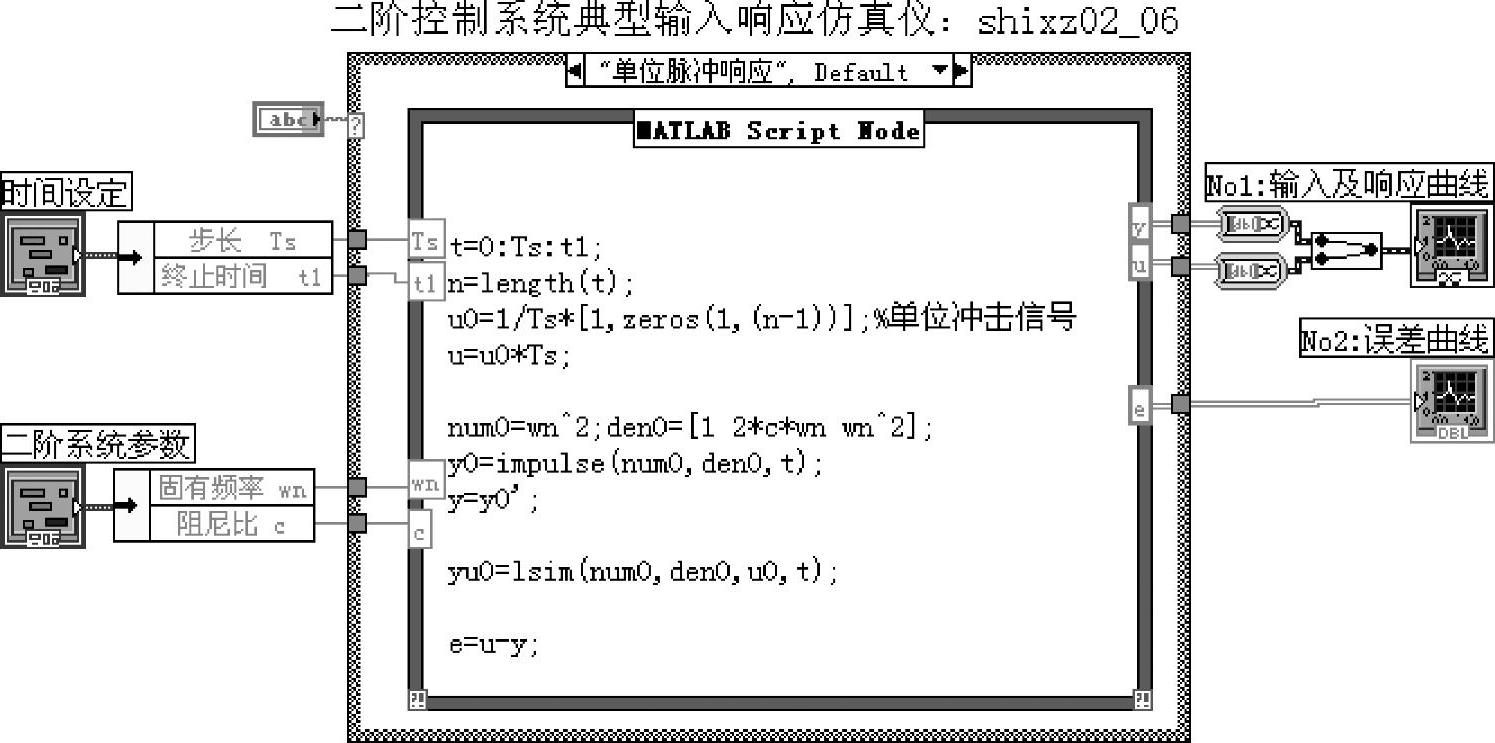
图2-3-2 程序shixz02_06框图面板
1.赋值
“时间设定”赋值框设定“步长Ts”及“终止时间t1”两项。
“二阶系统参数”赋值框设定式(2-3-1)所示的“固有频率ωn”及“阻尼比ξ”两项。
前面板中的输入响应选择,各示波器面板及其测量坐标等项参见一阶系统的说明(见图2-2-3),不再赘述。
2.运行程序
选择一种输入响应(默认单位脉冲响应),连续运行程序。改变系统参数,可见响应曲线和误差曲线随参数改变而同步连续改变。例如,对于单位阶跃响应,选择阻尼比ξ的值,可以实现无阻尼、欠阻尼、临界阻尼和过阻尼的仿真,可以动态显示不同阻尼比响应曲线的演变,动态显示阻尼比对系统振荡性及超调的影响。改变固有频率ωn,响应振荡快慢发生变化,但不影响超调。测量坐标系可以测量二阶系统时域性能的各项指标数据。如在图2-3-3参数的情况下,坐标系测得单位阶跃响应的峰值时间为1.6s,峰值为1.5266,误差为-0.5266。由仿真曲线可见,二阶系统式(2-3-1)单位阶跃响应的稳态位置误差为零,单位恒速响应的稳态误差为定值2ξ/ωn。
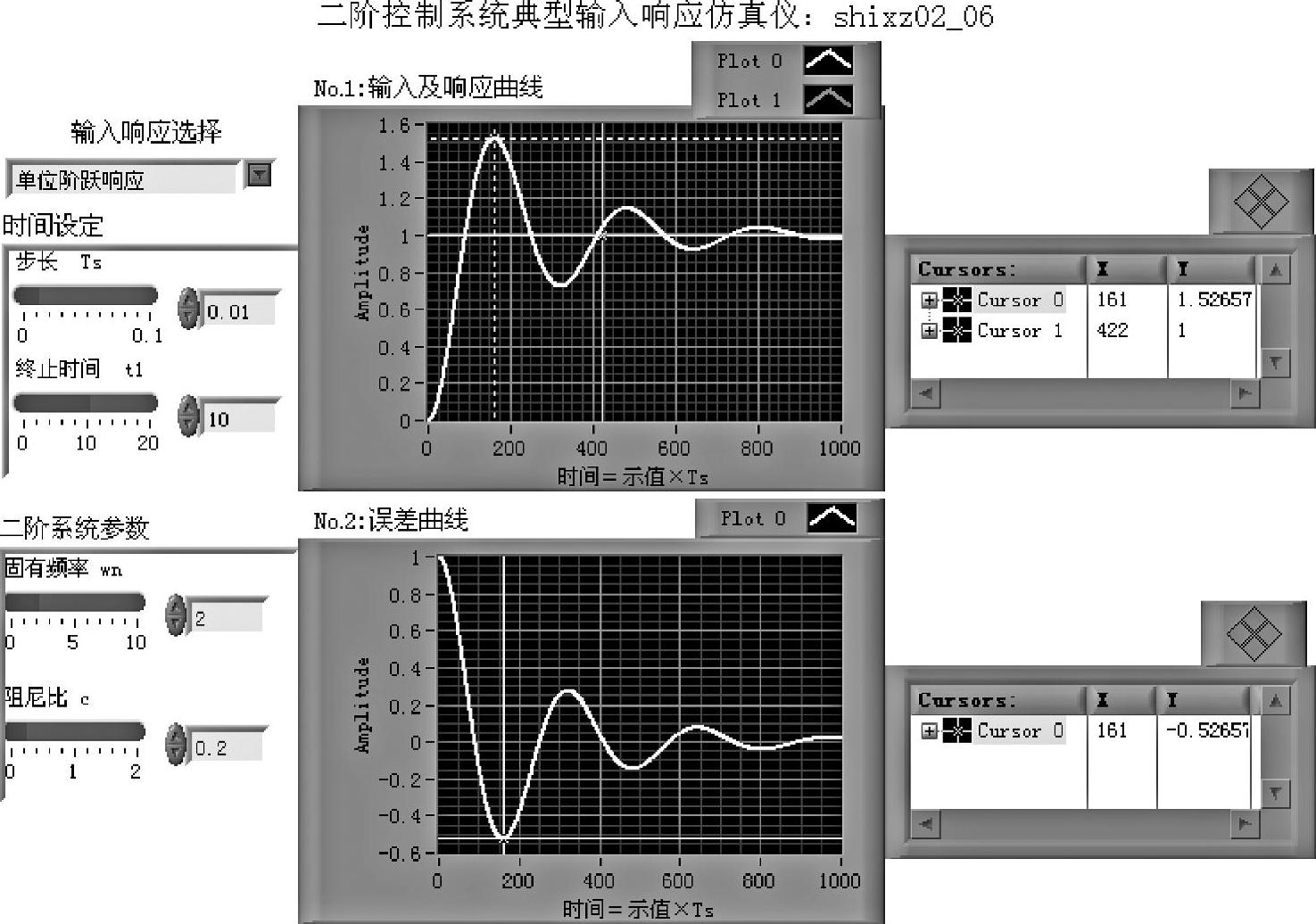
图2-3-3 程序shixz02_06前面板
二阶系统式(2-3-4)典型输入响应的仿真程序如shixz02_06所示。运行该程序,可以对比研究系统式(2-3-4)各参数对其时域性能的影响。当c=4,a=0.8,b=1时该系统单位阶跃响应如图2-3-4所示。
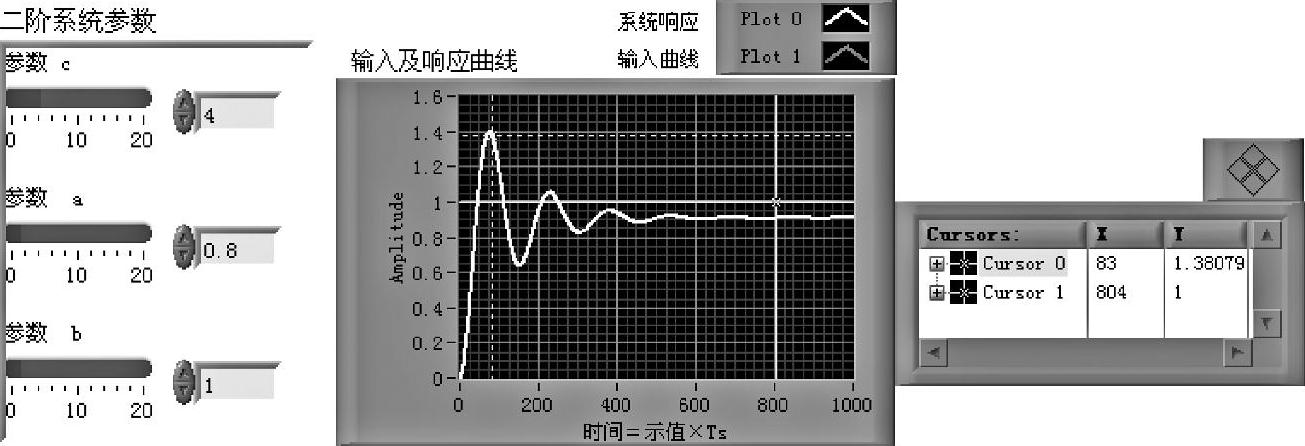
图2-3-4 二阶系统式(2-3-4)的单位阶跃响应
【例2-7】二阶控制系统的零输入、零状态响应的仿真分析仪。
如前所述,例2-6获得的是系统初始状态为0的零状态响应。下面仍以“组合”典型信号为例,讨论二阶系统的零输入、零状态响应以及系统的完全响应。仿真程序如shixz02_07所示,程序框图面板及前面板分别如图2-3-5和图2-3-6所示。
程序说明:
1.赋值
“输入”赋值。输入“组合”典型信号 ,通过对初位移u0、速度k1、加速度k2的赋值,设定输入为阶跃、恒速和恒加速信号
,通过对初位移u0、速度k1、加速度k2的赋值,设定输入为阶跃、恒速和恒加速信号
初态X0赋值。二阶系统初态有两个分量X0=[X10;X20]。由于讨论的是单输入单输出系统,为方便计算,这里的初态指的是二阶系统在t=0的输出值,而非状态值。所以在程序中已将此初始状态值转换为初始输出值。
其余各项赋值前例已有说明。
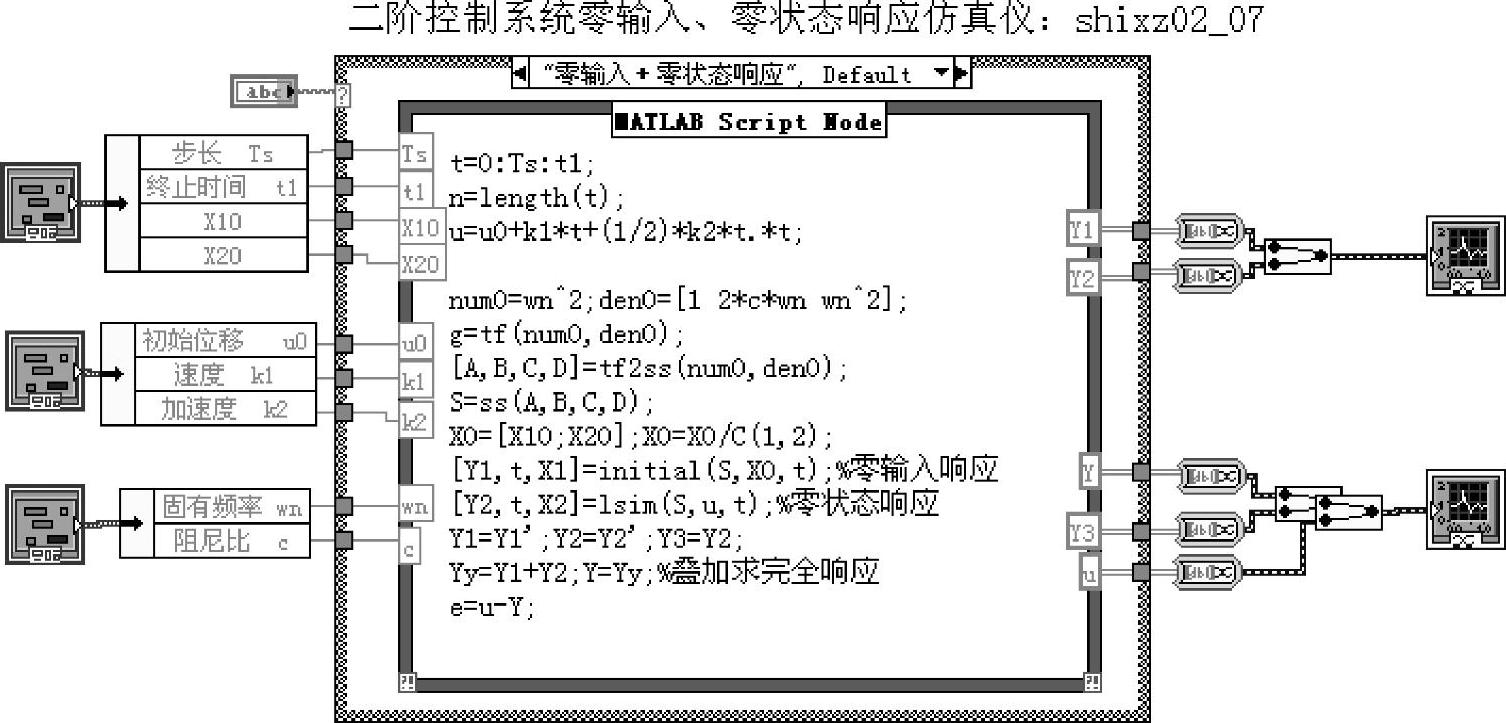
图2-3-5 程序shixz02_07框图面板
2.程序特点
仿真零输入响应、零状态响应和完全响应所用主要命令initial和lsim的调用格式和使用方法前已说明。为使初态表示初始输出,必须满足输出方程Y=CX。所仿真的二阶系统转换成状态方程后,其输出矩阵格式为C=[0,c2],所以在程序中实际参与运行的初态为X0=[X10;X20]/C(1,2)。这样,经过输出方程运算,初始输出等于对X0所赋的初值。如图2-3-6中,零输入响应初值等于初态X20=10。
3.程序运行
如图2-3-6所示,赋值后,选择输入响应(默认零输入+零状态响应),单击单次运行或连续运行按钮,示波器面板No.1上plot0显示初态为设定值10的零输入响应曲线。plot1显示对初态为零,设定输入u=20-1.5t+(1/2)t2的响应曲线。显然二者之和(叠加)可得系统对设定输入,在设定初态下的完全响应曲线。(https://www.xing528.com)
示波器面板No.2上plot0为系统对设定输入,在设定初态下的完全响应曲线。plot1显示对初态为零,设定输入u=20-1.5t+(1/2)t2的响应(与“零输入与零状态响应曲线”面板上plot1相同)。plot2显示输入曲线。
如前分析,系统零输入响应是暂态响应,体现单位脉冲响应的规律。系统对输入的响应由输入规律决定,无论其初始状态如何,最终都跟踪输入变化,是强迫响应。
二阶系统对恒速输入的稳态误差为k1(2ξ/ωn)。图2-3-7给出了稳态误差随固有频率与阻尼比的变化情况。当输入为u=20-1.5t时,对于同一时间测量点,图2-3-7a的误差为-1.5,图2-3-7b的误差为-0.75。
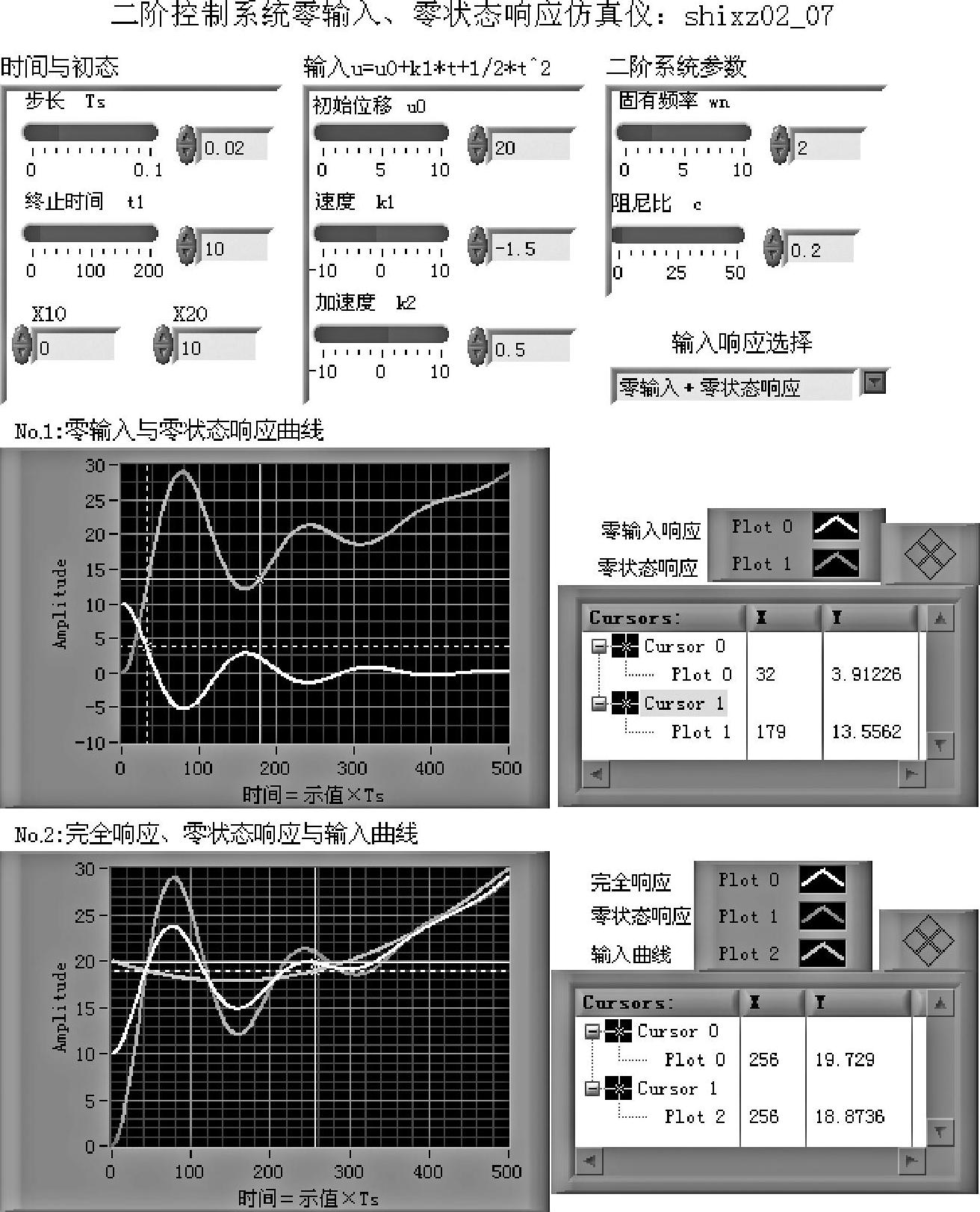
图2-3-6 程序shixz02_07前面板
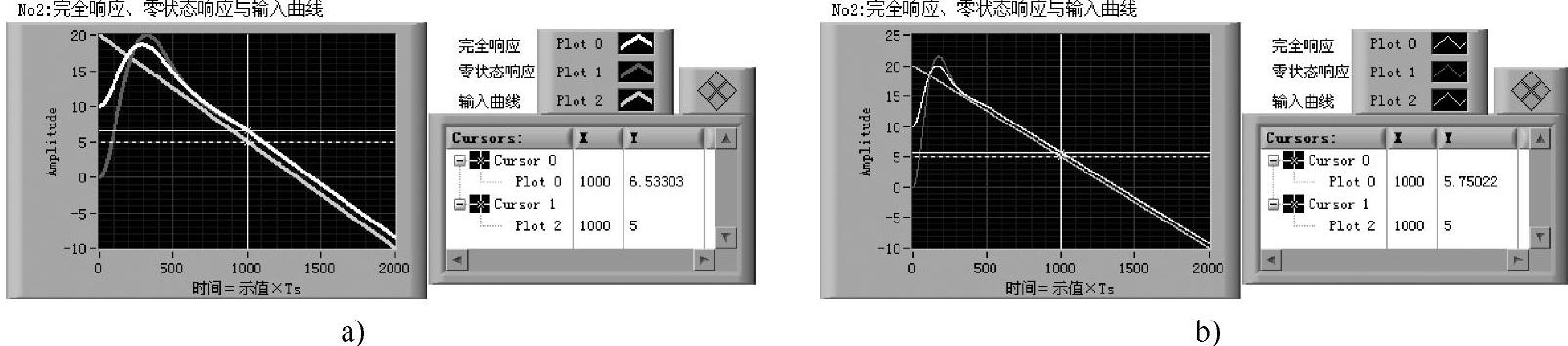
图2-3-7 二阶系统固有频率和阻尼比对恒速响应稳态误差的影响
a)ωn=1,ξ=0.5 b)ωn=2,ξ=0.5
前已述及,系统的零输入响应体现单位脉冲响应的规律。对于一阶系统,可以通过选择适当的初态,由其零输入响应求取其单位脉冲响应。二阶系统的单位脉冲响应与其状态之间有确定的关系。从前面的介绍可知,系统单位脉冲响应可以通过对系统单位阶跃响应求导得到。设系统输入为单位阶跃信号u=1(t),分别写出单位阶跃输入的零输入和零状态响应的输出方程

式中y1,y2分别表示零输入和零状态响应的输出,[x11x12],[x21x22]分别表示零输入和零状态响应的状态变量,输出矩阵C=[c1c2]。
由叠加原理,系统输出的完全响应,也就是系统的单位阶跃响应输出为

对式(2-3-23)两边求导得到系统的单位脉冲响应

对于二阶系统,代入式(2-3-3)的输出矩阵可得c1=0,c2=ω2n,状态方程x·12=x11,x·22=x21,可得单位阶跃响应和单位脉冲响应分别为

考虑到对于零输入响应,如果其初态为0,其状态轨迹也应为0,有

式(2-3-25)、式(2-3-26)与式(2-3-27)、式(2-3-28)两组式子表明,对于二阶系统,当输入为单位阶跃时,两个状态变量分别决定系统的单位阶跃响应和单位脉冲响应。阶跃响应可由输出方程表示为系统的输出,但单位脉冲响应却不反映在系统的输出上,只反映在系统输出的导函数上。由状态方程,输出的导函数由系统的另一状态决定。这个结论可以推广,例如输入为单位恒速,系统的输出为恒速响应,输出的导函数为系统的单位阶跃响应,它们分别由系统的两个状态变量决定。这表明,系统状态变量既决定其输出,也决定其输出的导函数,反映了系统的全部信息,而输出只反映系统的部分信息。
式(2-3-25)~式(2-3-28)还说明,单位脉冲响应也具有零状态响应的特征。也就是说,单位脉冲响应是一种特殊的响应,它既具有零输入响应最终会衰减为零的特征,也具有零状态响应的特征,而且,通过脉冲信号的作用,将使系统的初态发生改变。
程序shixz02_07 a给出了二阶系统状态变量曲线,其前面板如图2-3-8所示。示波器面板No.1上有3条曲线,plot0和plot1表示零输入响应的状态变量x11,x12。plot3表示用impulse命令绘制的系统脉冲响应曲线。No.2上也有3条曲线,plot0和plot1分别表示阶跃输入的零状态响应状态变量x21,x22,它们分别决定系统的单位脉冲响应和单位阶跃响应。plot2是按式(2-3-28)求出的单位脉冲响应,它是将plot0的纵坐标乘以C(1,2)=ω2n得到的。对比表明两示波器面板上的曲线plot2是完全相同的。编程时请注意,如果阶跃响应幅值不等于1,如图2-3-8所示,在使用式(2-3-28)求单位脉冲响应时要除以阶跃幅值。该条指令应写成x21 c=C(1,2)*x21/u0。如果使用式(2-3-26)仿真单位脉冲响应(x21 c=C(1,2)*(x11+x21)/u0),应注意图2-3-8中的初态应当选择为0。
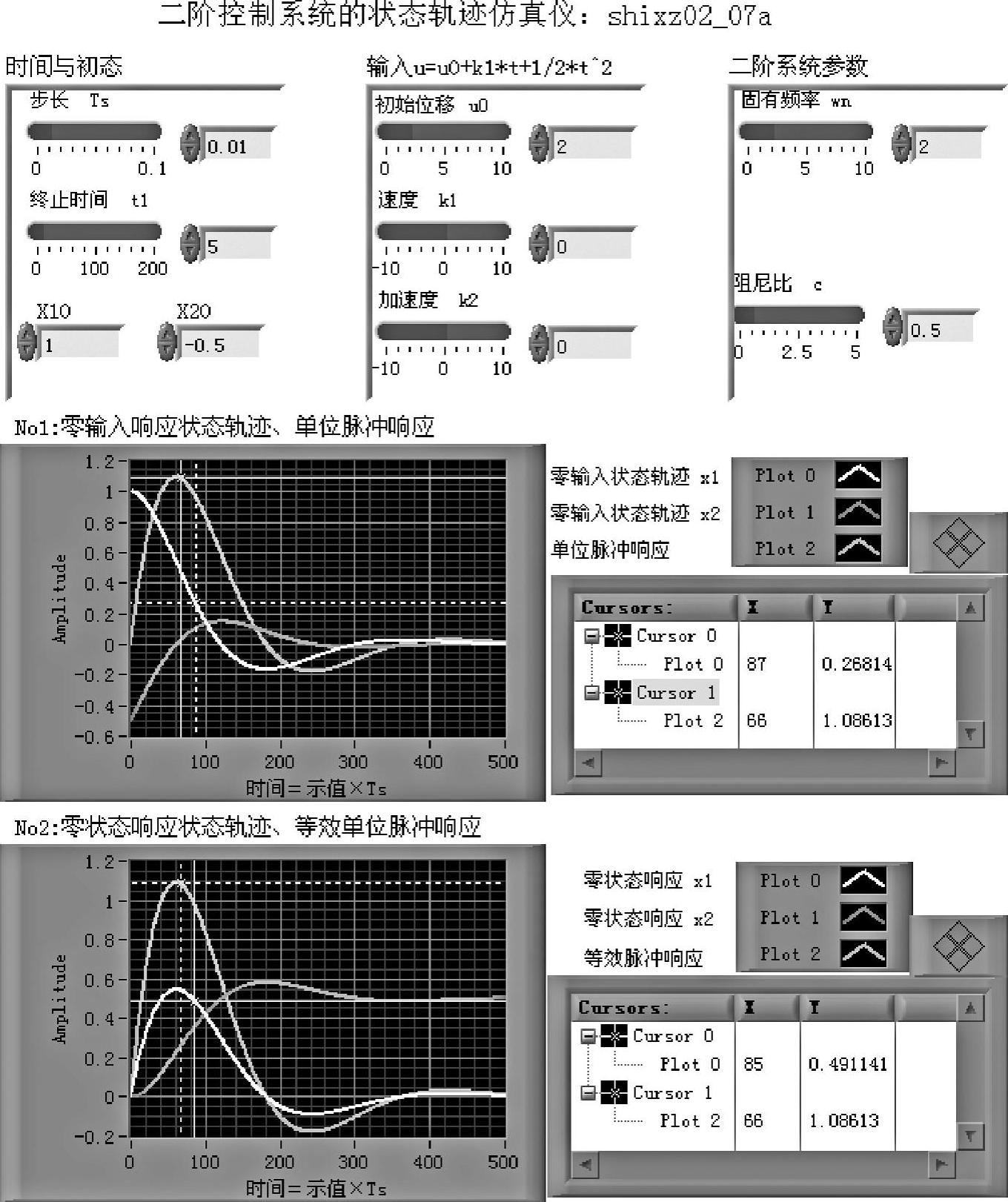
图2-3-8 程序shixz02_07a前面板
类似地,图2-3-9是程序shixz02_07 b的前面板,给出了恒速输入时状态变量轨迹、恒速响应及其导函数(单位)阶跃响应的仿真曲线。注意对比两个示波器屏幕上“单位阶跃响应”和“等效单位阶跃响应”曲线。求等效单位阶跃响应时,注意除以恒速系数k1。通过这两个仿真实例,可以比较深刻地体会状态与输出的关系,理解“输出通常只反映系统的部分信息,状态反映了系统的全部信息”这句话的含义。
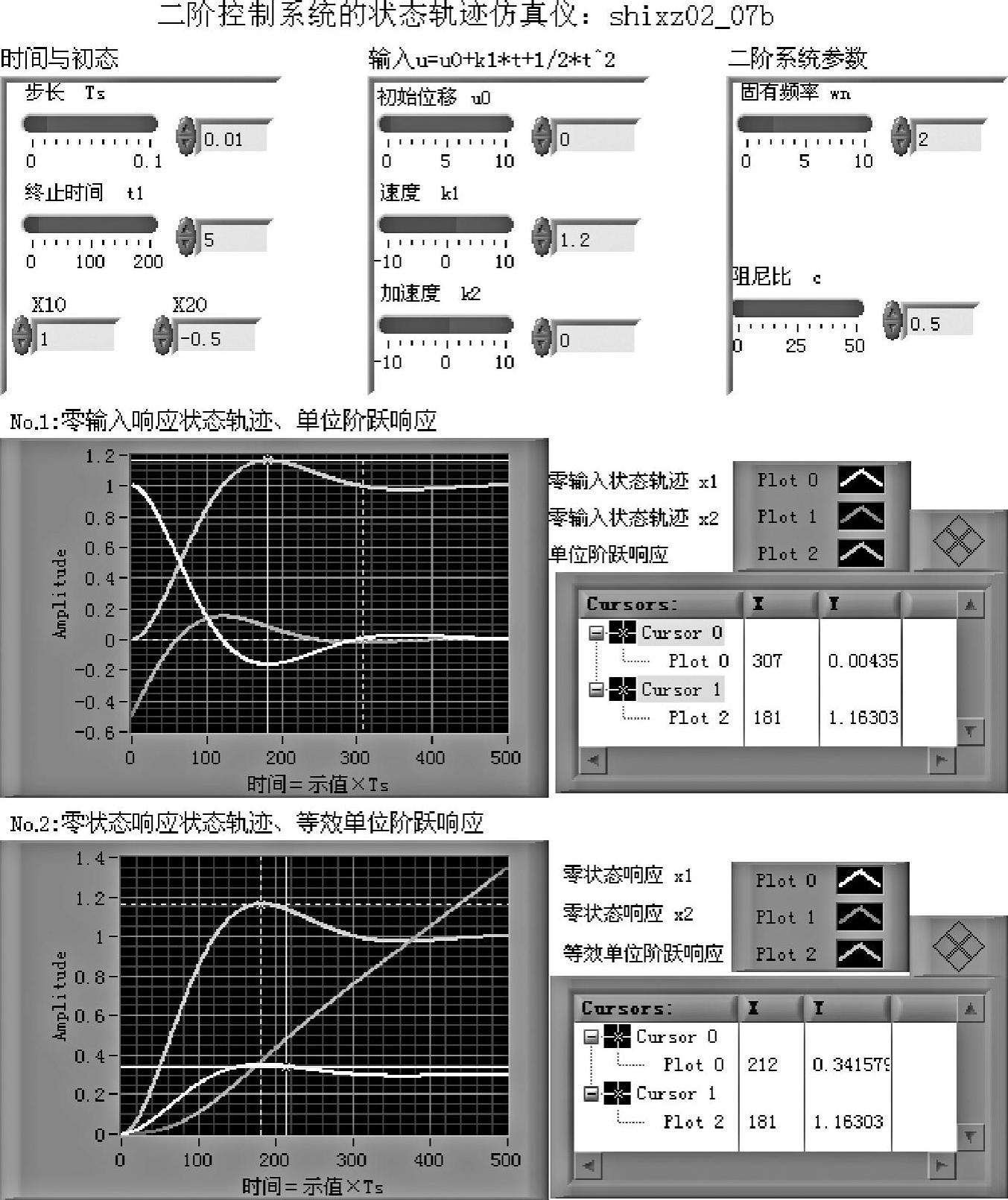
图2-3-9 程序shixz02_07b前面板
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。