



【摘要】:为了研究方便,以下将建立适用于上述两种测量方案的啮合方程,并做规定:小写表示运动后的矢径与标架。假设刃边齿条沿齿轮的Y、Z两轴线平移,齿轮与齿条绕各自的Z轴做分度运动,于是有:齿轮刃边齿条啮合方程 此时刃边齿条与被测齿轮廓面在啮合点处满足接触条件与相切条件,于是有:式即为在理想条件下的啮合关系。
为了研究方便,以下将建立适用于上述两种测量方案的啮合方程,并做规定:小写表示运动后的矢径与标架。假设刃边齿条沿齿轮的Y、Z两轴线平移,齿轮与齿条绕各自的Z轴做分度运动,于是有:
(1)齿轮
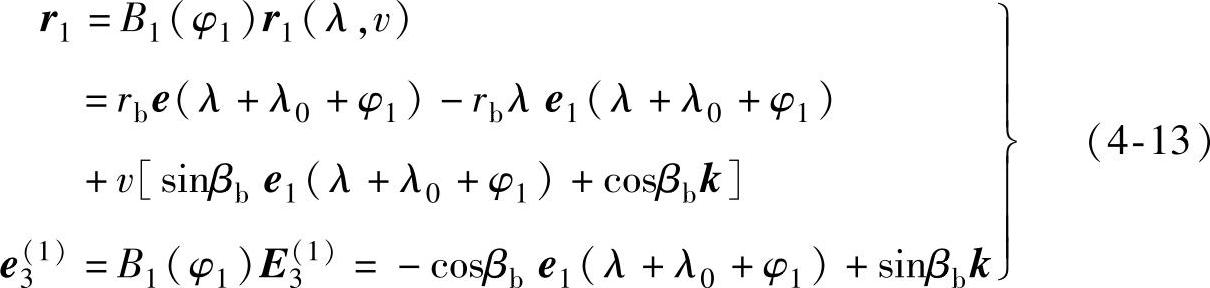
(2)刃边齿条

(3)啮合方程 此时刃边齿条与被测齿轮廓面在啮合点处满足接触条件与相切条件,于是有:

式(4-15)即为在理想条件下的啮合关系。
将式(4-13)、式(4-14)代入式(4-15),并使所有讨论归于图4-3中的O1系内,有:
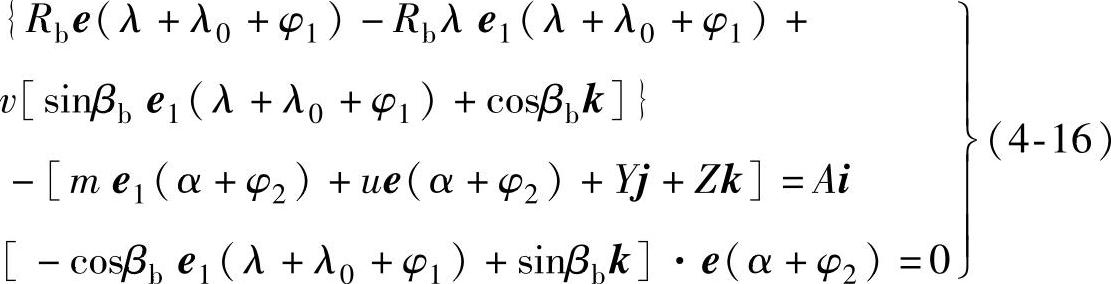
根据圆矢量函数纯积运算公式,由式(4-16)中第二式
可得:
sin[(α+φ2)-(λ+λ0+φ1)]=0 (4-17)(https://www.xing528.com)
于是有
(λ+λ0+φ1)-(α+φ2)=0
进而有
λ=(α+φ2)-(λ0+φ1) (4-18)
将式(4-18)代入式(4-16)的第一式,经合并后可得
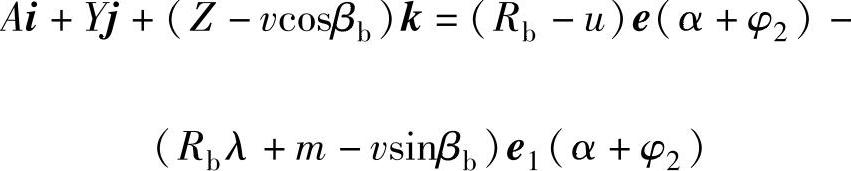
分别用e1(α+φ2)、i、k与上式两边作纯积,并根据式(4-18),经整理后可得
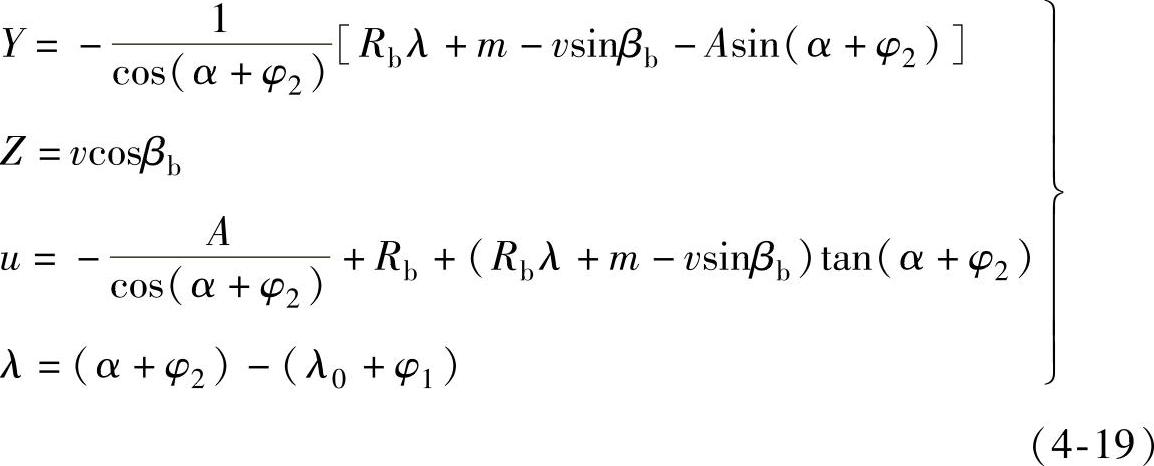
在式(4-19)中,由于α,λ0为常数,齿轮的分度转角φ1改变了啮合时的初始点相位角,齿条的转角φ2改变了啮合角;当φ1和φ2确定后,Y和Z仅为参数v的函数,表明齿轮与齿条沿直母线啮合。消去参数v的影响,可求得Y和Z、φ1、φ2之间的关系为

当φ1和φ2确定时,Y为Z的函数,二者坐标的合成确定了一条理论直母线;当φ1或φ2改变时,Y与Z的合成确定了廓面上的不同的直母线,构成直母线族。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。