



1.被测齿轮廓面方程
由式(2-30),并考虑初始相位角的影响,可得无误差条件下被测齿轮廓面的一般表达式:

渐开线螺旋面的法向单位矢量为
E(1)3=-cosβbe1(λ+λ0)+sinβbk (4-3)
因此,廓面的法向误差可写为
h=h(λ,v)E3(1) (4-4)
式中,h(λ,v)为法向误差函数。
由此,误差条件下被测齿轮的廓面表达式可写为
R∗1=R1(λ,v)+h(λ,v)E3(1) (4-5)
根据渐开线齿轮精度标准,其齿廓偏差与螺旋线偏差都是在端面渐开线的法向度量的,根据式(2-26)可得端面渐开线的法线方向为
β=e1(λ) (4-6)
因此,齿轮廓面的偏差形式可写为
f=f(λ,v)β=f(λ,v)e1(λ) (4-7)
如图4-6所示,渐开线螺旋面的法向误差与端面渐开线法向误差的大小之间满足
f(λ,v)=h(λ,v)cosβb (4-8)
对于直齿轮,βb=0°,h(λ,v)=f(λ,v),端面渐开线法向误差即为渐开线柱面的法向误差。(https://www.xing528.com)
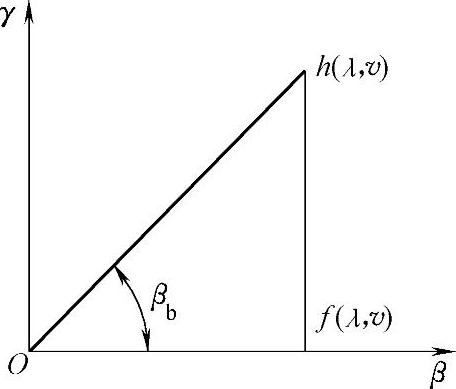
图4-6 廓面偏差
2.刃边齿条方程
在O2坐标系中建立齿条测头刃边方程,如图4-7所示。无误差条件下,其方程为
R2(u)=me1(α)+ue(α) (4-9)
式中,m为齿条测头的结构参数,为常数;u为沿齿条刃边方向的标量参数;α为齿条测头的齿形角。
由式(4-9)可进而求得齿条测头的切线与法线方向的单位矢量为

由此,齿条测头的误差方程可写为
ε=ε(u)e1(α) (4-11)
因此,误差条件下实际的齿条测头方程为
R(2)=[m+ε(u)]e1(α)+ue(α) (4-12)
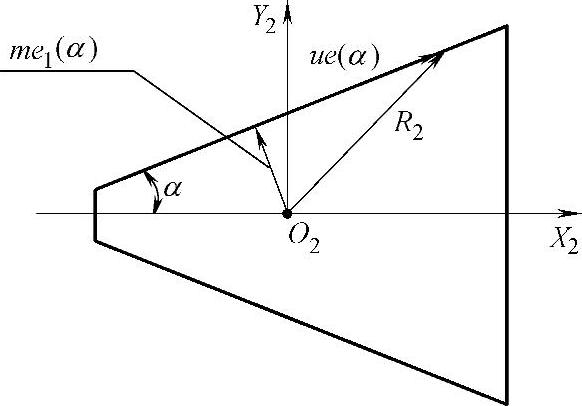
图4-7 刃边齿条
值得注意的是,由于法向误差的存在,导致被测齿轮与刃边齿条测头实际廓面的法线方向也发生变化,这将对实际啮合过程产生影响。考虑到其影响项为高阶,为了简化模型,这里对其忽略不计。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。