



坐标测量法可分为直角坐标测量法和极坐标测量法。
(1)直角坐标测量法 直角坐标测量法是借助三坐标测量机实现空间三维立体曲线——螺旋线的测量。在机实现三坐标测量大齿轮螺旋线偏差不仅仪器结构复杂,而且其测量基准不易确定,直接影响测量精度。
(2)极坐标测量法 如图3-6所示,以被测齿轮回转轴线为基准,根据螺旋角关系可知,齿轮转角φ与测量沿齿轮轴线位移Z的关系方程为
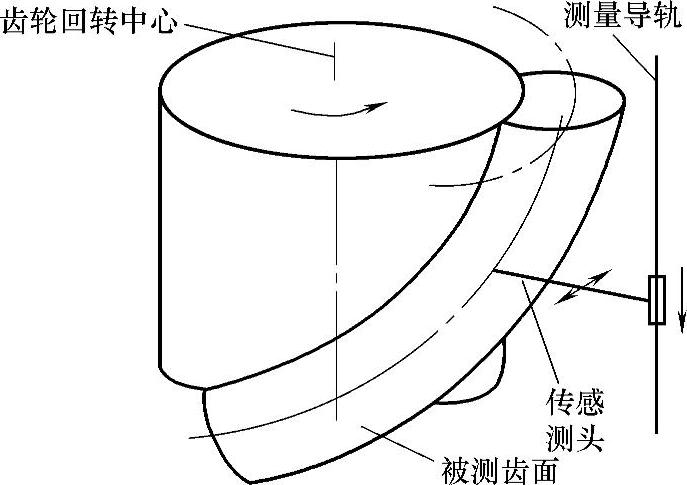
图3-6 螺旋线总偏差在机测量原理
Z=rφcotβ (3-18)
式中,r为分度圆半径;β为分度圆螺旋角。(https://www.xing528.com)
按式(3-18)建立的测量坐标系是通过测角装置(可与齿廓偏差测量中的测角装置共用)和测长装置(沿齿轮轴线方向)实现的由一个回转运动坐标和一个直线运动坐标组成的圆柱极坐标系。点测头在测量时分别测出螺旋线上各点的这两个坐标值,将被测齿轮的实际螺旋线与理论坐标值进行比较,其差值即为螺旋线总偏差。该测量原理是展成圆柱极坐标法,通常采用电子展成法实现测量。
在机测量中,建立高精度直线(轴向)测量导轨并保证与被测齿轮回转轴线安装平行(任意方向)和带有微位移传感器的测头跟随装置,对被测齿轮转角信号计算机实时采样,根据内部的理论计算公式控制伺服电动机驱动位于被测齿轮分度圆上的测头沿着齿轮轴向直线移动。与此同时,获取的采样转角(测角装置给出)信号、轴向位移(测长装置给出)信号以及微位移传感器测头的切向信号,三路信号通过计算机数据处理即可获得被测齿轮的螺旋线总偏差Fβ。
螺旋线总偏差Fβ方程为

式中,φi为齿轮转角;r为分度圆半径;Pz为螺距;Si为测头沿齿轮的轴向位移;Δti为传感测头示值。
对于直齿轮,其螺旋线为直线,则测量原理与方法比较简单,在被测齿轮静止不动的条件下(φi=0°),对正于分度圆上的微位移传感器测头沿被测齿轮轴线移动所获取的切向信号,通过数据处理即获得螺旋线总偏差Fβ。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。