



1.选择设备
如图8-10所示选择实际的设备类型,这个例子中选择TP170B。
2.连接设置
如图8-11所示,在“通信”→“连接”里进行HMI设备和S120的连接:

图8-10 选择设备
1)建立连接的名称并激活(可以任意命名),如这里的“Connection_1”。
2)选择“通信驱动程序”,这里选择SIMATIC S7300/400。
3)设置通信接口的波特率、站地址等。这里的Station地址指S120的硬件上拨码开关的设置地址。

图8-11 连接设置
3.连接变量建立
如图8-12所示建立连接变量。
在“通信”→“变量”里建立HMI和S120关联的变量,地址设定时:
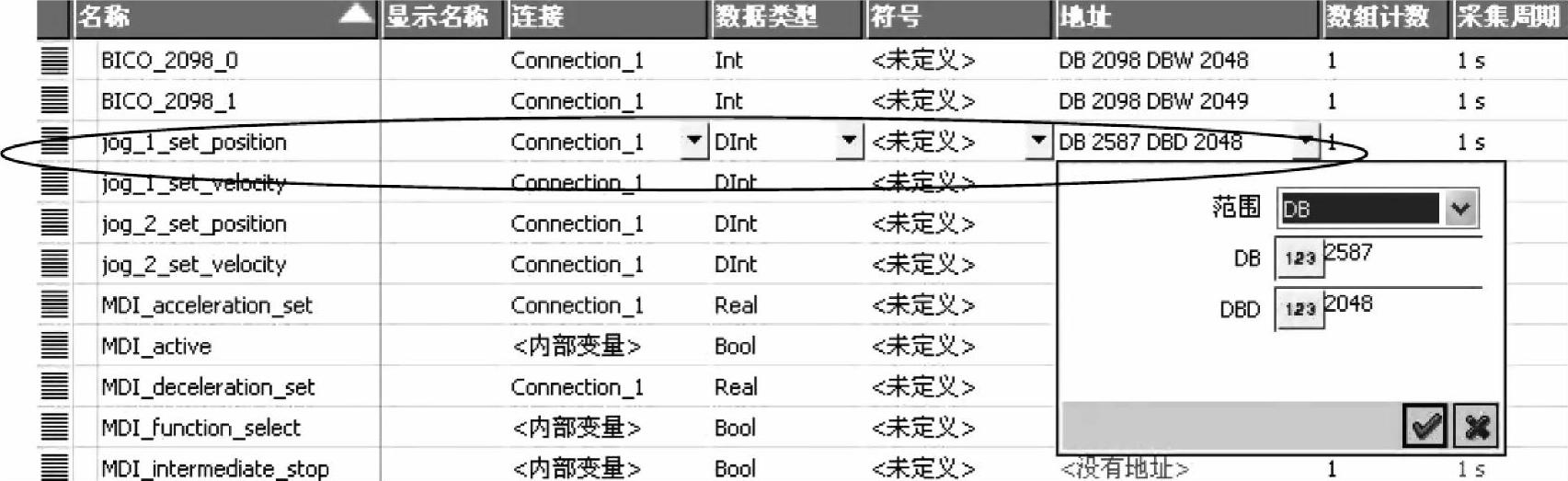
图8-12 连接变量建立
1)HMI直接和S120连接时,范围选“DB”。“DB”填写对应的S120中关联的变量。这里DB2587对应S120中的p2587,Jog功能中位置设定值,如图8-13所示。(https://www.xing528.com)

图8-13 DB与S120的参数对应
2)“DBD”对应这个参数的总索引号。
如图8-14所示,索引号定义如下:
位15~10:装置号(见SCOUT或STARTER中S120的配置);
位9~0:参数索引号。
举例,项目中的装置号可以在离线状态下,打开项目配置如图8-15所示查看。
4.HMI画面设置及变量关联
将HMI上组态的画面和刚才建立的变量进行关联,如图8-16所示,就可以实现通过HMI设备控制S120驱动电动机的应用,进行给定或读取参数。
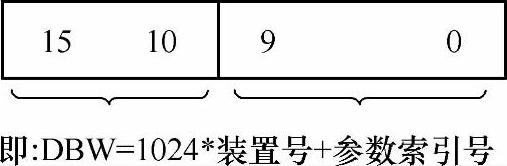
图8-14 DBW计算

图8-15 项目配置
变量jog_1_set_position关联到S120中Drive_1的p2587(EPOS jog1 traversing distance)。双击输入/输出框,在“常规→过程变量”项中关联变量jog_1_set_position,从而可以通过HMI给定S120中jog的位置设定。
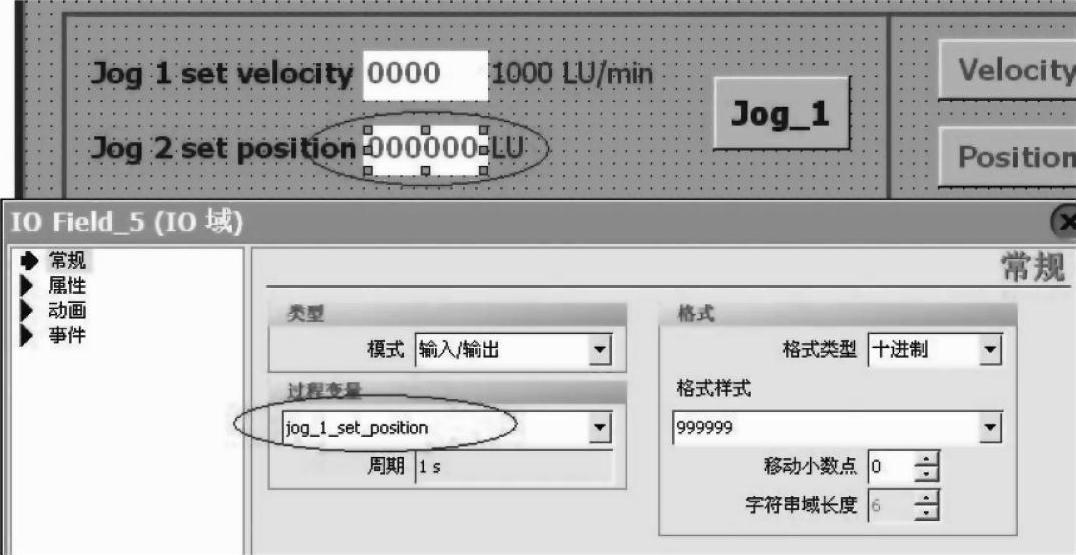
图8-16 HMI画面设置及变量关联
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。