



1.基本概念
在高性能的异步电动机矢量控制系统中,转速的闭环控制环节一般是必不可少的。通常,采用旋转编码器等速度传感器来进行转速检测,并反馈转速信号。但是,由于速度传感器的安装给系统带来一些缺陷:系统的成本大大增加;精度越高的编码器价格也越贵;编码器在电动机轴上的安装存在同心度的问题,安装不当将影响测速的精度;电动机轴上的体积增大,而且给电动机的维护带来一定困难,同时破坏了异步电动机的简单坚固的特点;在恶劣的环境下,编码器工作的精度易受环境的影响。而无速度传感器的控制系统无需检测硬件,免去了速度传感器带来的种种麻烦,提高了系统的可靠性,降低了系统的成本;另一方面,使得系统的体积小、重量轻,而且减少了电动机与控制器的连线。因此,无速度传感器的矢量控制方式在工程应用中变得非常必要。
无速度传感器矢量控制方式的基本技术指标定义如下:速度控制精度为±0.5%,速度控制范围为1:100,转矩控制响应小于200ms,起动转矩大于150%/0.5Hz。其中,起动转矩指标根据不同品牌的变频器其性能有所不同,大致在150%~250%之间。如图1-32所示为某无速度传感器矢量控制方式下的起动转矩特性,在0.3Hz极低速下能达到150%以上的转矩。
有时为了描述上的方便,也把无速度传感器的矢量控制方式称为开环矢量控制或无PG反馈矢量控制。
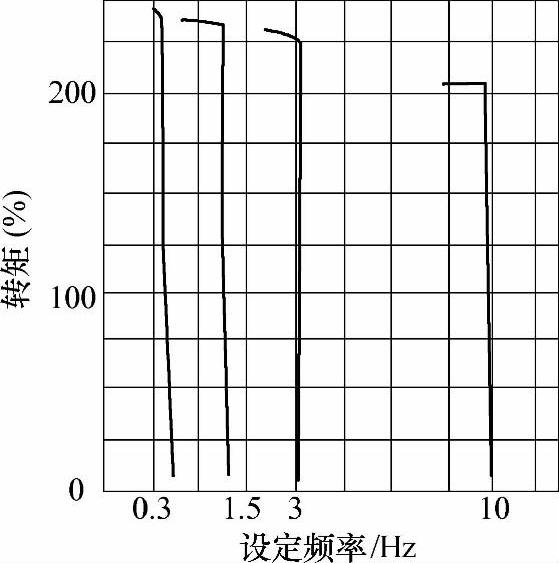
图1-32 无速度传感器矢量控制方式起动转矩特性
小贴士
无速度传感器的矢量控制方式是基于磁场定向控制理论发展而来的。它的基本控制思想是根据输入的电动机的铭牌参数,按照一定的关系式分别对作为基本控制量的励磁电流(或者磁通)和转矩电流进行检测,并通过控制电动机定子绕组上的电压的频率使励磁电流(或者磁通)和转矩电流的指令值和检测值达到一致,并输出转矩,从而实现矢量控制。
2.电动机参数的调谐整定
由于电动机磁通模型的建立必须依赖于电动机参数,因此选择无速度传感器矢量控制时,第一次运行前必须首先对电动机进行参数的调谐整定。目前,新型矢量控制通用变频器中已经具备异步电动机参数自动调谐、自适应的功能,带有这种功能的通用变频器在驱动异步电动机进行正常运转之前可以自动地对异步电动机的参数进行调谐后存储在相应的参数组中,并根据调谐结果调整控制算法中的有关数值。
从图1-33所示的异步电动机的T形等效电路中可以看出,电动机除了常规的参数如电动机极数、额定功率、额定电流外,还有R1(定子电阻)、X11(定子漏感抗)、R2(转子电阻)、X21(转子漏感抗)、Xm(互感抗)和I0(空载电流)。
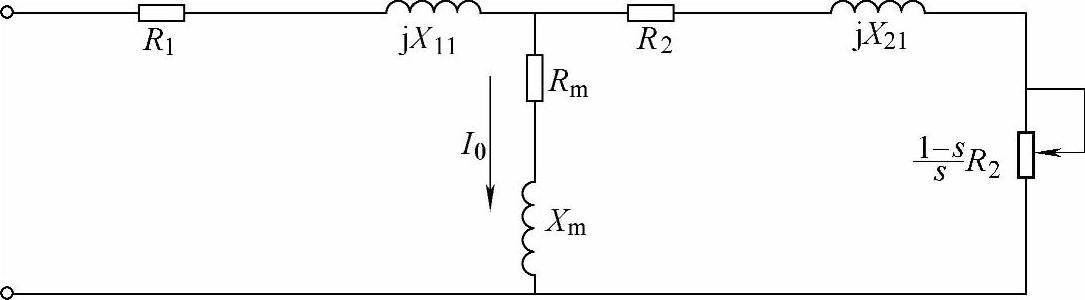
图1-33 异步电动机稳态等效电路
小贴士(https://www.xing528.com)
参数调谐分电动机静止调谐和旋转调谐两种,其中,在静止辨识中,变频器能自动测量并计算定子和转子电阻以及相对于基本频率的漏感抗,并同时将测量的参数写入;在旋转辨识中,变频器自动测量电动机的互感抗和空载电流。在电动机与机械设备难以分开的场合可采用静止式调谐整定的方法,即将固定在任一相位、仅改变振幅而不产生旋转的三相交流电压施加于电动机上,电动机不旋转,由此时的电压、电流波形按电动机等效回路对各项参数进行运算,便能高精度地测定控制上必需的电动机参数。
3.速度调节器ASR
速度调节器ASR的结构如图1-34所示,图1-34中Kp为比例增益,KI为积分时间。积分时间设为0时,则无积分作用,速度环为单纯的比例调节器。由于是无速度传感器矢量控制方式,速度环的实际速度来源于变频器内部的实际计算值。

图1-34 速度调节器简化框图
速度调节器ASR的整定参数包括比例增益Kp和积分时间KI,其数值大小将直接影响矢量控制的效果,其目标就是要取得动态性能良好的阶跃响应(见图1-35a)。具体调节的影响情况如下:①增加比例增益Kp,可加快系统的动态响应,但Kp值过大,系统容易振荡;②减小积分时间KI值,可加快系统的动态响应,但KI值过小,系统超调就会增大,且容易产生振荡;③通常先调整比例增益Kp值,在保证系统不振荡的前提下尽量增大Kp值,然后调节积分时间KI值使系统既有快速的响应特性又超调不大。
图1-35b是比例增益Kp值与速度调节器ASR的阶跃响应关系,图1-35c是积分时间KI值与速度调节器ASR的阶跃响应关系。
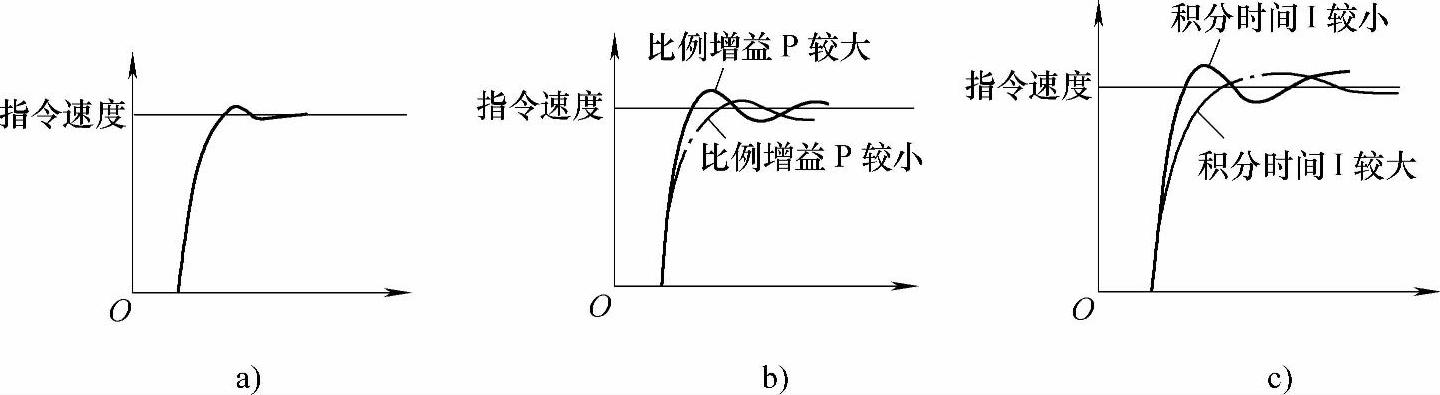
图1-35 速度调节器ASR的阶跃响应与PI参数的关系
a)参数整定情况一 b)参数整定情况二 c)参数整定情况三
小贴士
在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制。PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。比例控制是一种最简单的控制方式,其控制器的输出与输入误差信号成比例关系;在积分控制中,为了消除稳态误差,引入“积分项”,使稳态误差进一步减小,直到接近于零;微分控制则是使抑制误差的作用的变化“超前”,改善系统在调节过程中的动态特性。在变频器控制中,一般应用PID控制在类似供水等闭环控制和速度控制中。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。