



历史上有代表性的缩小机构的实例为维特沃斯制作的能够测量10-6in的测长机,如图2.13.2所示。这里使水平测定头移动的进给丝杠装有100牙/in的细螺纹,这是一个缩小机构。该测长机还有一个缩小机构是带有刻度的手轮,和圆柱蜗杆直接相连,再和连接丝杠的蜗齿轮相啮合。蜗杆蜗轮的传动比为1/100。即手轮(蜗杆)转100圈,蜗轮才转一圈,是高缩小比例的机构。由于这样二级缩小机构的效果而得以可能进行高精度微细长度的测量。因此,如果手轮上的刻度做得正确而细致,则测长的误差就极其微小。此例说明,齿轮作为缩小机构是有效的。在划线机里也经常使用和该测长机基本相同的进给机构(蜗轮蜗杆+进给丝杠)。
图2.13.3所示为一个楔形缩小机构。楔形零件A做左右移动,零件B则做被缩小了的上下方向的运动。楔角θ只要做得小就可以有很大的缩小率。
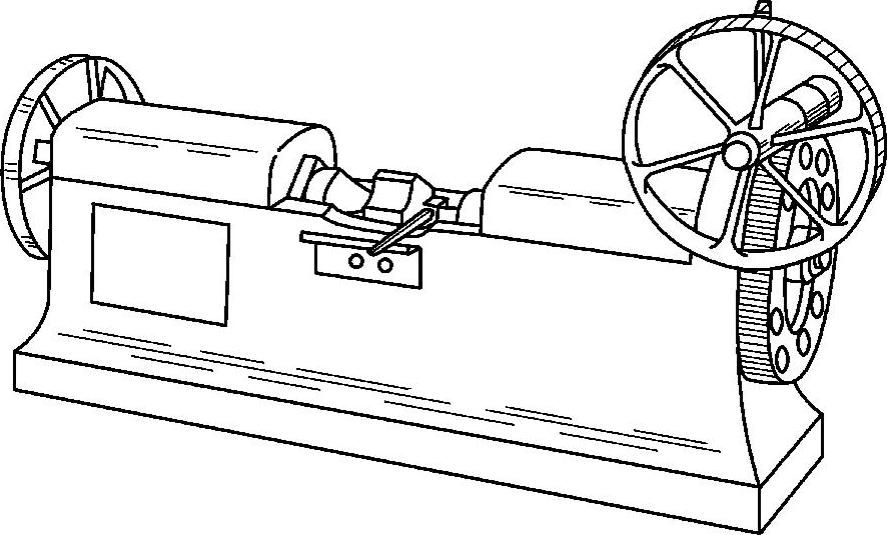
图2.13.2 可测量10-6in的测长机(伦敦科学博物馆藏)
无论什么样的缩小机构,都必须有高刚度才行。缩小率大而作为目标的动作越小,由外力而产生的微小变形则会发生越大的误差。因此,传递运动的系统的刚度小则变形也大,产生的误差也大。
变形是误差发生的原因,它是由摩擦阻力引起的。为了防止变形,运动副使用滚动导轨以减少摩擦阻力。
作为缩小机构最近经常使用的还有一个机构,是使用压电元件(也叫作石英元件)和电歪元件的电气系统。压电元件和电歪元件的详细内容请参照相关文献。压电元件在加上电场时可诱发与此成比例的变形,电歪元件具有其变形和所加电场的平方成比例的特征。
压电材料的代表有锆酸钛酸铅(PZT),电歪材料有镁铌酸铅(PMN)。这样的元件可以把所加电场(电压)从电气上加以精确地缩小,即可以把分解能力加以细微控制,元件的变形可以进行细微而精确的控制。例如,在PZT的例子中可得到0.25μm/V的特性,从电气上可以容易地得到控制mV的分解能力。因此,能够决定位置精度在0.01μm(10nm)以上。
图2.13.4所示为用于超精密加工的微动工具位置决定机构。
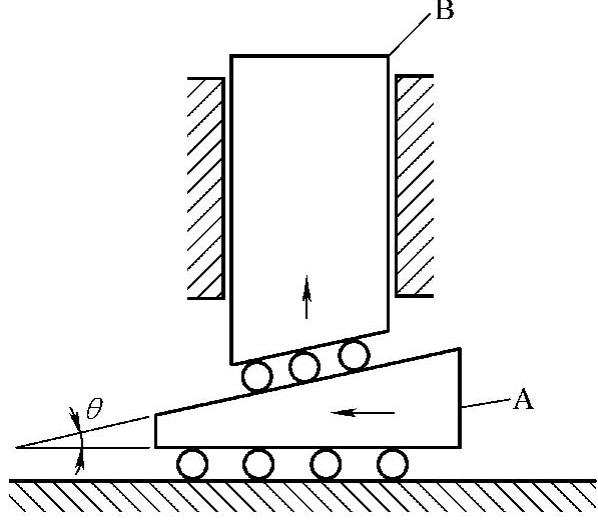
图2.13.3 楔形缩小机构(https://www.xing528.com)
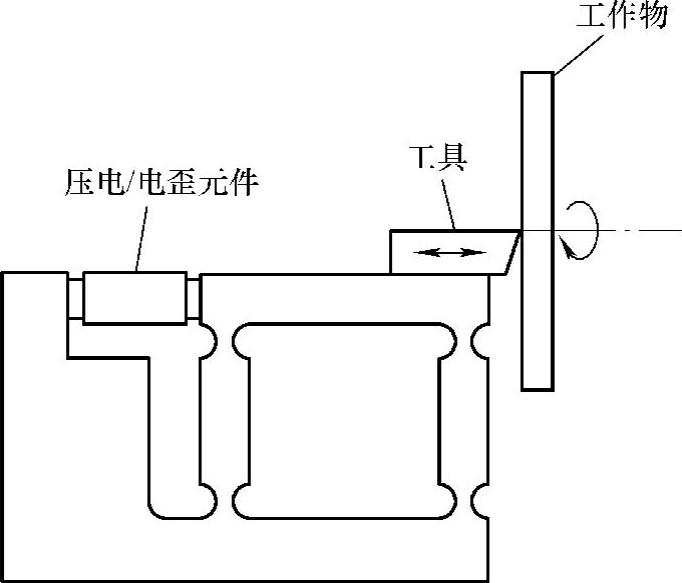
图2.13.4 超精密加工机的工具微动定位机构的基本构造
使用压电/电歪元件的电气系统,虽然多用来决定轻载荷高精度机械的位置,但在使用上也有必须注意之处,归纳如下:
1)在几十微米的驱动范围内可以决定位置精度在0.01μm以上。
2)产生的压力可达400N/cm2,而应答速度也可快至10μs。
3)滞后与时效效果大而显著,使用时必须注意。为了除去滞后,将此用微型计算机记忆,对往复误差进行辅正。
实际上经常使用光的缩小法。其代表性的应用则在自动装配过程中使用的摄像工程和平版印刷技术。用自动制图机等作为精度良好的大的原图,进行照相,缩小成几分之一至数百分之一的高精度微细制品。即在将大的画像用光学系统缩小微细化的同时可能得到高的精度。
由此,得到下面的系:
【系1】缩小机构可以用齿轮、杠杆,以及使用压电/电歪元件的电气系统、光学系统等来实现。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。