



将上述机械的惯性加大的机械要素叫作飞轮。飞轮多用来储藏能量,这里用于吸收转动偏差,即在驱动系统的途中无法插入刚性低的传动带要素时,将非定常的转动成分用惯性力吸收。必须尽量在转动偏差(干扰)的发生点附近进行吸收、除去。
飞轮的设计如下:在图2.12.9a中,加变动载荷力矩T于轴,此轴由驱动力矩Tav驱动。此时,运行中当载荷力矩比驱动力矩大时,不足的部分由飞轮供给,且转速下降。
另一方面,当驱动力矩比载荷力矩大时,飞轮的转速上升。在图中考虑力矩的关系,J为惯性矩,ω为角速度,则有

将ωdt=dθ代入得

在一个运行周期中的任意两点A、B积分,有

右边表示由飞轮供给的能量,这里表示为E)。A、B两点之间E为最大值的点有下式,见图2.12.9b。
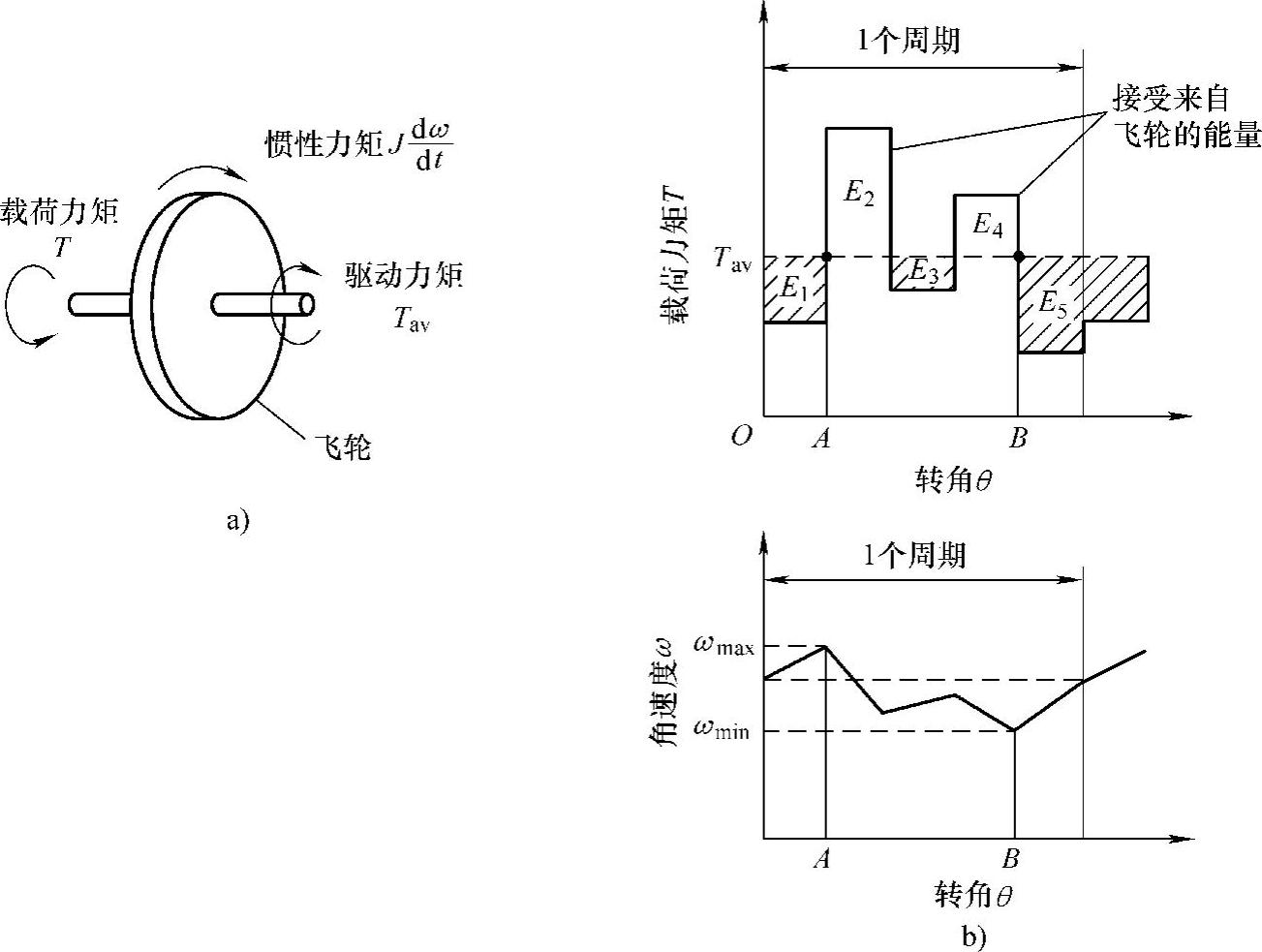
图2.12.9 飞轮计算模型
a)飞轮模型 b)在1个周期中载荷力矩与角速度的变动
 (https://www.xing528.com)
(https://www.xing528.com)
即Emax为从飞轮供给能量为最大的一个周期中两点之间的积分。现在,在载荷力矩模型化的图2.12.9b中,用载荷力矩比Tav大的E2、E4表示从飞轮向轴供给的能量,E1、E3、E5的能量是从驱动源向飞轮注入的能量,由于它们的作用使转速恢复。这个例子考虑A、B两点,因为这是比其他任意两点间的能源供给值都要大的区间,这两点间最大能量供给量Emax表示为

假定ωmax、ωmin从由给定载荷力矩、驱动力矩曲线开始求得Emax,从式(2.12.14)求得飞轮的惯性矩J。
实际的计算中将下式定义为角速度变化系数

将下式定义为平均角速度

则有

δ值根据机械不同而不同,直接传动的电动机在0.002以下,一般的机床在0.03左右。但是更高精度的机械,如激光磁盘原盘记录装置等,必须采用积极的控制以实现高的旋转精度。
【系4】如果使用飞轮作为过滤要素,在相当程度上可以吸收、除去旋转误差。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。