



由于滑台工作条件不同会发生时进时停的反复细微振动,特别是滑动导轨这样的振动很多。这里叫附着滑动(爬行)。这个振动是一种自励振动。自励振动可以作为具有负的衰减的振动。
如图2.10.9所示,在一个自由度的振动系中衰减系数c为正时,质量m所产生的振动如图2.10.9a所示随时间而衰减,这里阻尼与运动方向相反,产生和运动速度成比例的阻抗而使运动衰减下去。但是在c<0时,相反地,一旦发生了振动则振动渐渐地加大。即所谓c<0意味着一旦发生运动,与运动方向相同而与其速度成比例的加速度运动就会发生。即 系数的正负决定着自励振动的发生。
系数的正负决定着自励振动的发生。
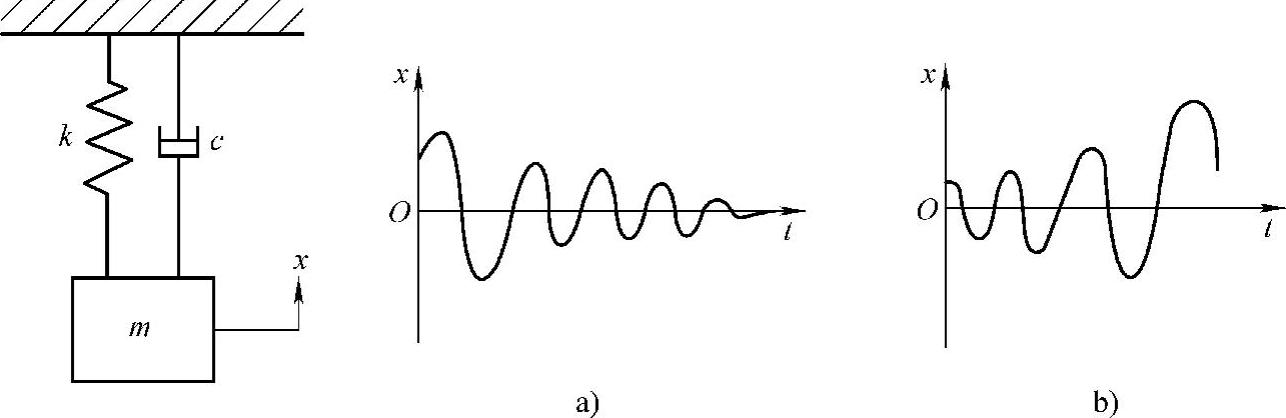
图2.10.9 一个自由度振动系统的衰减振动和自励振动
a)c>0时(衰减振动) b)c<0时(自励振动)
这里,先将导轨如图2.10.10所示模型化,滑台由弹簧和阻尼的作用而停止。固定一侧导轨做运动,由于摩擦阻力R而弹簧压缩平衡在某一点,以这点作为坐标原点。
现在,由外力作用滑台以速度 向右移动,相对速度为
向右移动,相对速度为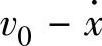 ,此时,摩擦阻力R如图2.10.11所示变化。以速度为横坐标、摩擦阻力为纵坐标,摩擦特性向右下移。
,此时,摩擦阻力R如图2.10.11所示变化。以速度为横坐标、摩擦阻力为纵坐标,摩擦特性向右下移。
图2.10.10 滑台模型(将滑台静止不动,而驱动导轨运动)
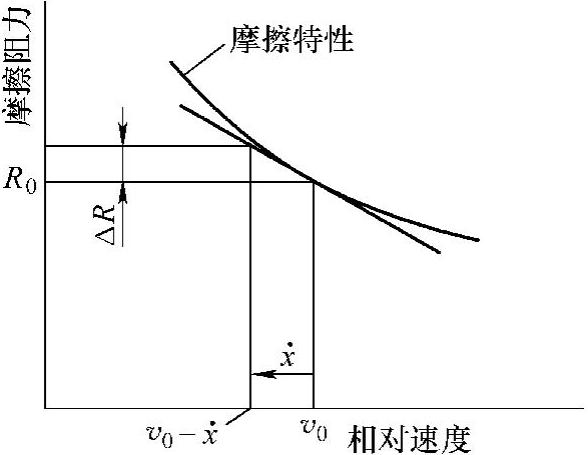
图2.10.11 相对速度与摩擦阻力的关系(https://www.xing528.com)
相对速度为 时,摩擦阻力增加ΔR,即有函数
时,摩擦阻力增加ΔR,即有函数

此时的运动方程为

因此,用上面的关系式,有

如前所述 的系数为正则稳定,为负则产生自励振动。与此相应地,当c-α>0时为衰减运动,当c-α<0时为自励振动,即发生附着滑动。
的系数为正则稳定,为负则产生自励振动。与此相应地,当c-α>0时为衰减运动,当c-α<0时为自励振动,即发生附着滑动。
若图2.10.11中曲线斜率向右上升时,α为负值,c-α为正值,发生的振动必然衰减得到稳定的体系。一般金属做的滑动导轨,如图2.10.11那样具有曲线向右下倾的特性,容易发生爬行,使用聚四氟乙烯、PEEK等润滑性好的材料做的导轨、流体静压导轨等因曲线向右上升而具有避免发生爬行的摩擦特性。
【系5】为防止爬行,导轨面必须使用摩擦特性曲线向右上升的材料。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。