



用上述调整机构的方法,几乎所有的场合都存在对偶而能够将游隙调整为零。但是,在机械里内藏的运动基准(对偶一侧)不可能完全做到误差为零。因此,游隙即使为零,这个误差也连续不断地在运动里出现。
用干涉的拘束,除了能够使游隙为零外,还必须注意伴随着的另一个效果,即游隙除去的同时,由于这个运动基准的误差而产生的运动误差在某种程度下可以减少,这就是用干涉拘束的优点。这样的效果叫作“误差平均化效果”(参照第2篇第12章)。
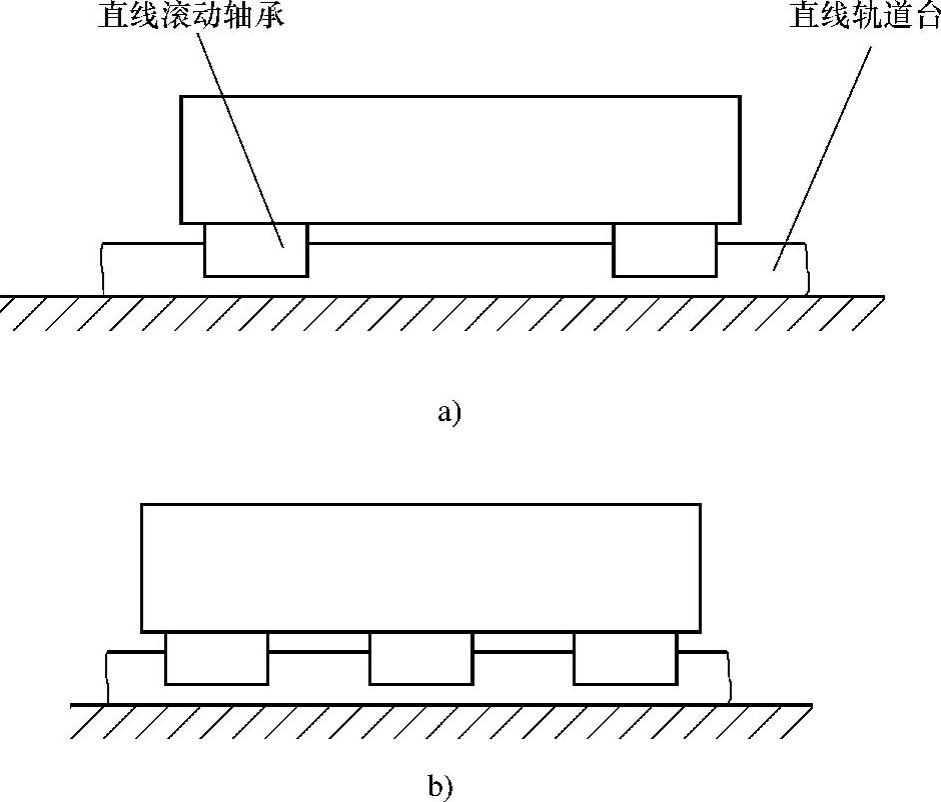
直线滚动导轨的例子如下所述。直线滚动导轨虽有各种各样的形式,其中一个例子如图2.6.6所示。一般将图2.6.7a那样在一个直线轨道台上配置两组直线轴承作为运动约束。直线滚动导轨由于加了游隙调整机构,各自可以把游隙设定到零。但是,采用这样的方式后直线轴承和轨道台所具有的误差会在工作台的运动中表现出来。
这里,使此运动基准误差不易产生如图2.6.7b那样用三个直线轴承,不管哪个轴承配置部分发生运动误差,如真直度、俯仰、偏航、侧滚等,其他的两组或一组轴承拘束这个发生运动误差的运动,因而运动误差较之轴承为单体的时候可以相当减少。
即用干涉来赋予拘束时,有使内藏运动基准的误差减衰的作用,但是必须注意会增加若干运动阻力。
下面的例子是齿式联轴器。齿式联轴器如图2.6.8所示,作为高精度、高刚性的联轴器或者分度装置的零件来使用。其标准种类有从直径30mm、齿数20至直径820mm、齿数360。加工这些齿时,难免会有误差,但是如果齿只有一组(这样的形态实际上不能考虑)时,这个齿的误差容易在分度精度等方面表现出来,但是即使最少也有20个齿啮合时,各个齿的误差受到其他齿的干涉,两者之间的游隙当然为零,而误差减少,得到比各个齿精度高的作为一个高装配精度的整体。
这个齿式联轴器啮合不动,故没有相对运动,离开又再啮合,而没有像前例那样由于干涉而增加运动阻力的问题。
进给丝杠等也能如下述那样用干涉赋予约束。如图2.6.9所示,两组螺母组合在游隙能为零的同时,因长度l变长,螺杆的螺距误差等受到干涉而减少,能实现更高精度的进给运动。但是,这样滚珠循环式的机械零件中,滚珠解放而进入沟道时会引起阻力的变化,位置精度等引起劣化,这点要注意。
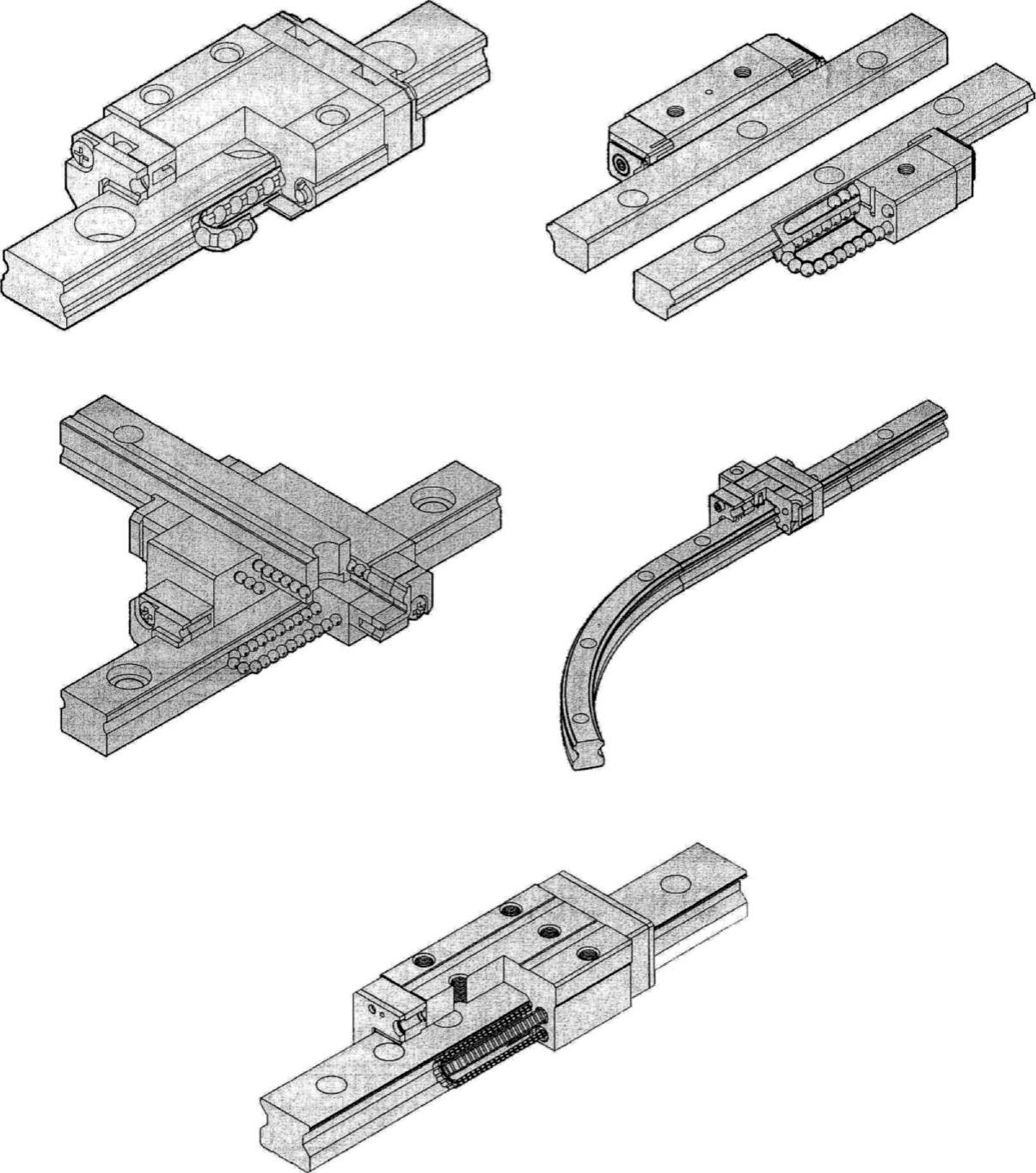
图2.6.6 各种形式的导轨
 (https://www.xing528.com)
(https://www.xing528.com)
图2.6.7 用机械干涉拘束来实现高精度化
a)一般的组成 b)增加了拘束条件的组成
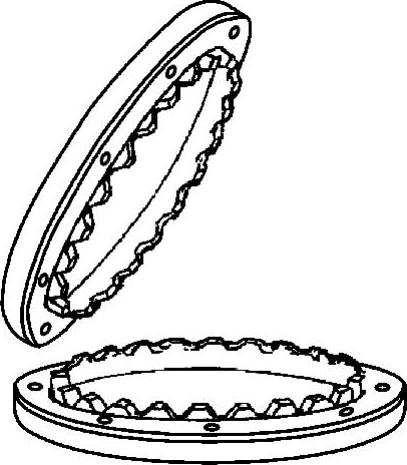
图2.6.8 齿式联轴器(大久保齿轮工业)

图2.6.9 定压预紧双螺母(日本精工)
最后的例子,大型卧式铣床(东芝机械)中用两对蜗轮蜗杆驱动。如图2.6.10所示,两组蜗杆在蜗轮的正反对向位置配置,目的是用两组蜗杆来使蜗轮的旋转误差互相干涉以尽量减少旋转误差。即用这个方式比用单个蜗杆驱动的场合所产生的旋转误差平均值要小。
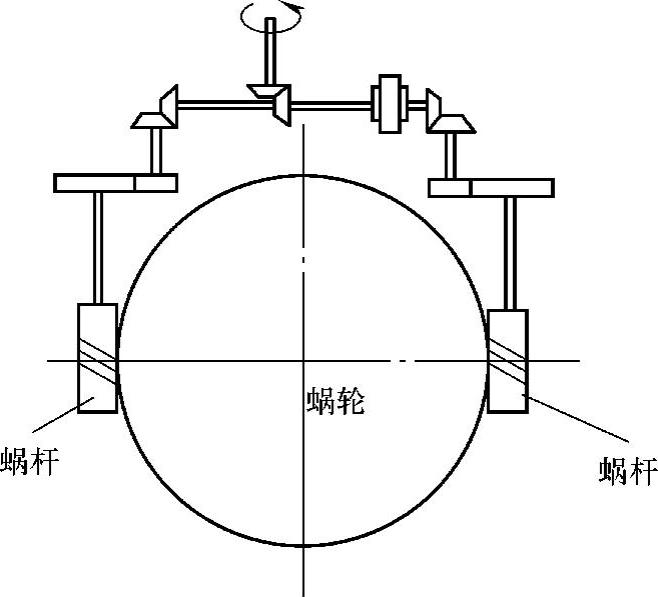
图2.6.10 蜗轮蜗杆驱动装置
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。