



在图2.6.3所示的例子中有拘束上下方向的两个运动拘束。拘束左右方向的运动拘束一个。在各自的运动约束里,滚子成对地装入,其中一侧的滚子a用单侧固定的支承构造,b一侧用两端支承的构造。即b一侧用强力弹簧压住,滚子a用偏心轴支承。用该偏心轴按图2.6.4所示将滚子的位置沿半径方向移动可以把游隙设定为零。实际设定为预压状态(负的游隙)。
这样的运动约束的精度要好,即必须把作为运动基准面一侧的滚子支承柔度设计成比相反一侧滚子的柔度要小,否则不能实现高的运动精度。图2.6.3所示的例子中,与精度高的运动约束面(4个三角记号的面)相接触的滚子b用两端支承,相反一侧的滚子a用单端支承。为什么这样做能提高精度?说明如下:
图2.6.5所示为一个运动约束。基准面和另一侧的运动约束有误差Δb时,一旦外力为零,滚子所受的力如下式
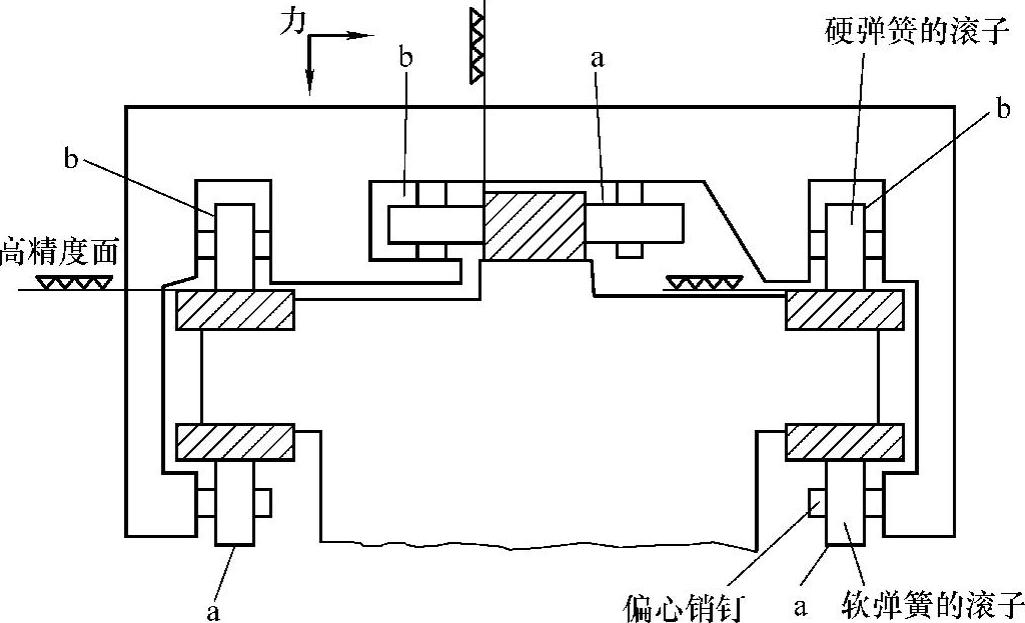
图2.6.3 用调整机构实现零间隙的导轨
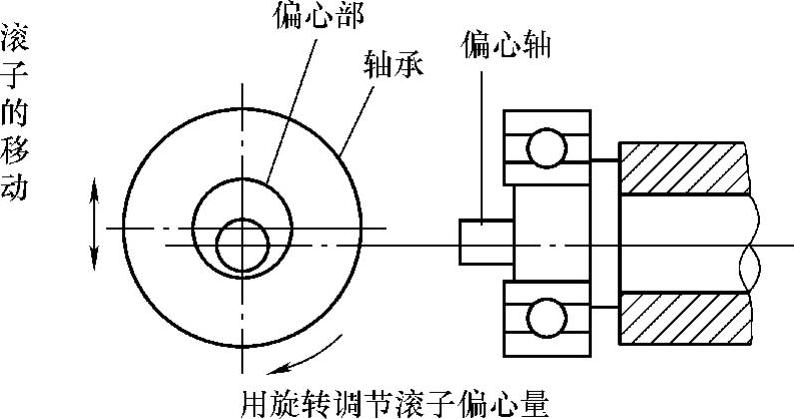
图2.6.4 间隙调整机构
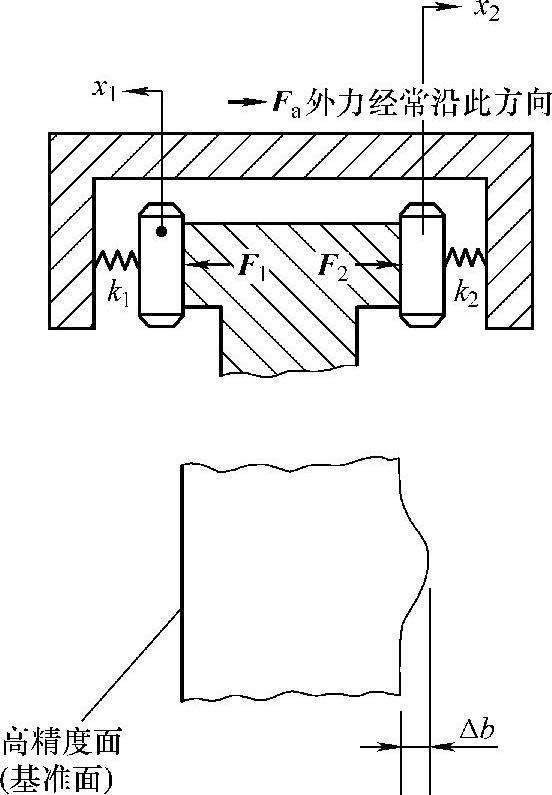
图2.6.5 滚动导轨的刚性和精度的关系

沿着运动约束滑动台移动发生的误差,只有
 (https://www.xing528.com)
(https://www.xing528.com)
弹簧系统发生变形,这里将两轴承的弹性系数设为k1和k2,则有

由式(2.6.1)和式(2.6.3)有

如果,k1和k2是同样刚性(k1=k2),则
x1=x2=Δb/2(2.6.5)只有x1的变位量,即只有Δb/2,滑动台向右移动,即成为运动误差。另外,k1为k2的10倍刚性时,即k1=10k2,代入式(2.6.4),有
10x1=x2(2.6.6)
将此代入式(2.6.2),有

即滑动台仅向右移动Δb/11,因此,滑动台的运动精度在柔软弹簧一侧的运动约束面的误差仅影响约一成而已。这里必须注意,假设外力Fa一直按图2.6.5所示的方向,如果按相反方向加以外力,k2柔软的结果是发生大的变位,此时运动约束的两面都必须采用高精度加工,必须有k1=k2。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。