



所谓机器人,其形式千差万别,一般的形式如图2.5.5所示。严格来说,具有与人手腕机能相似的机能叫作机械手才正确。因此,机械手做和人手大体同样的作业,能做焊接、涂装、装配、检查、运输。
最接近人手的机械构造如图2.5.5a所示,为6轴垂直多关节机器人,这台机器人由许多轴和机械手组成,因为它的关节与安装面垂直,所以称为“垂直多关节型”机器人。各轴的名称如下:
1)基本三轴(手臂部:决定三次元空间位置):
•S轴(转动轴:Swing Arm):旋转轴。
•L轴(下手臂:Lower Arm):摆动轴。
•U轴(上手臂:Upper Arm):摆动轴。
2)手腕轴(手腕部:决定手的姿势):
•R轴(Rotational Axis):旋转轴。
•B轴(Bending Axis):摆动轴。
•T轴(Twist Axis):摆动轴。
图2.5.5b所示为机构动作模型,适当地把旋转轴和摆动轴的运动组合起来就可以完成各种柔软的工作所需要的姿势了。一般来说,三条基本轴的运动就可以确定手在三次元空间里的任意点定位,而绕三条轴位置旋转的自由度则可以保证手在任意点上的任意姿势,对这6个自由度的控制是通用型机器人的基本功能。当然,需要多少个自由度,还必须根据实际情况而定,有时,还会和其他自动化机构结合,以更灵活多样地完成各种任务。
只要有必要充分的自由度,一个机器人就什么都能做。但是,仔细看看各个作业,可以明白,机能的要求还是各不一样。例如,将传动带上流动的零件取出排列到零件排列盘上的作业。只有从点向点的移动,但途中并不要求做正确的运动。从始点到终点的位置精度粗糙也可以,这叫作PTP(Point-to-Point)控制。但是,这时运送较重的物品而要较大的力量的场合很多。
另外,涂装机械手必须对机器人手尖的动作(速度和位置)进行连续控制,这叫作CP(Continuous Path)控制。这时,几乎不用什么力而且几乎不要求什么精度。但是,如在电弧焊接控制上则必须使焊条和工件的距离保持一致,较之涂装机器人来说则要有必要的精度。

图2.5.4 采用全体设计的数控车床(森精机)
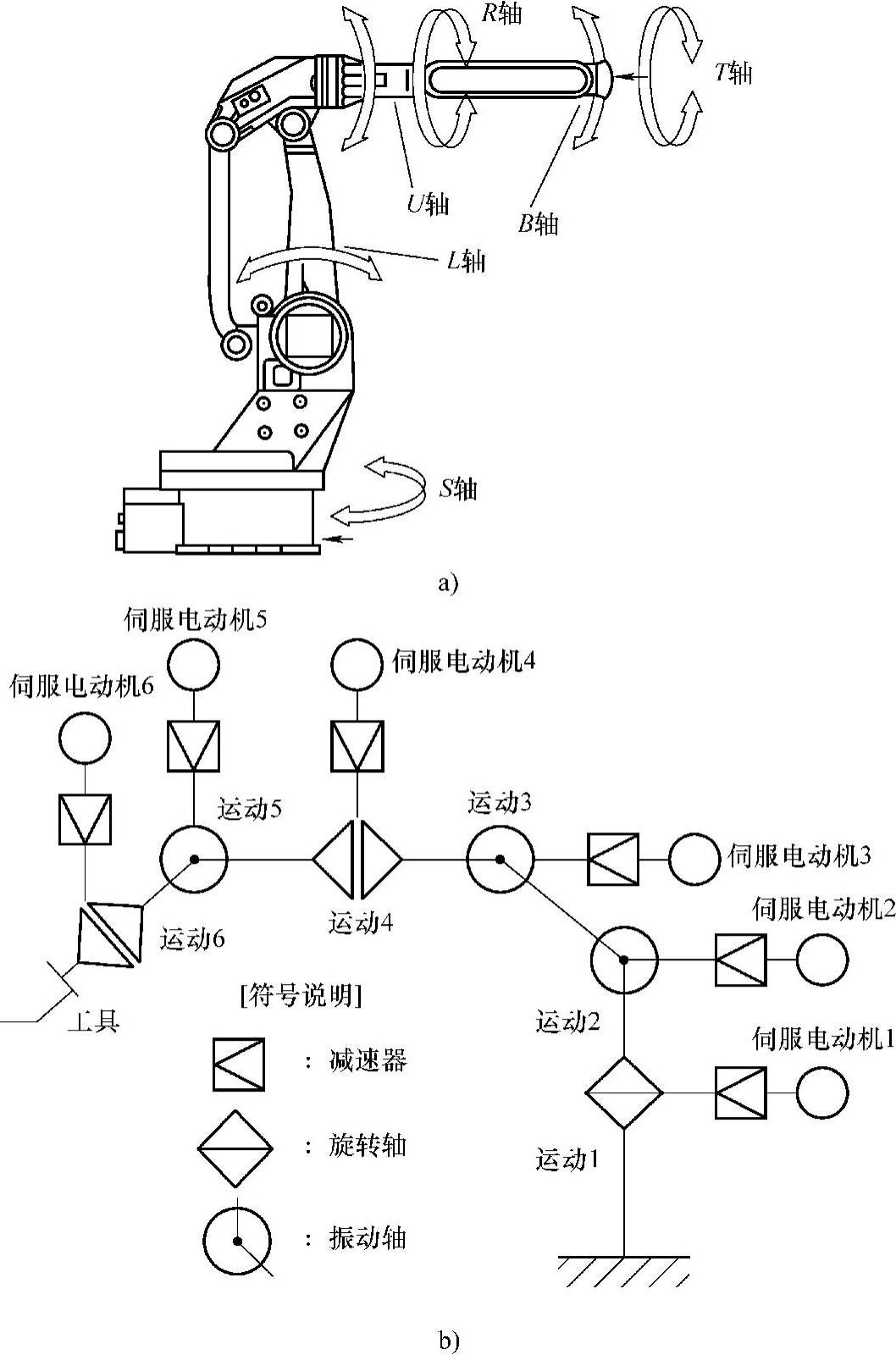
图2.5.5 6轴垂直多关节机器人(https://www.xing528.com)
a)各轴名称 b)机构动作模型
在日本诞生的世界有名的产业用机器人,有山梨大学的牧野洋教授等开发的SCARA机器人。SCARA是Selective Compliance Assembly Robot Arm的缩略语。Compliance作为刚性的倒数“柔度”来考虑即可(参照第2篇第8章)。这是在机械装配线上具有融通性(flexi-bility)的高性能机器人。这个设计从综合设计的视点出发予以纠正。
一般机器人的机能是从一定空间的位置搬运或者接受物体(或者道具)。这个位置有静止的点,也有在曲线上的点连续移动的位置,这个位置决定精度不高。
为了在大量生产时实现装配自动化,如采用虽不完全但专用的自动装配机械时,在一定程度上可以实现。在多品种少量生产时不能使用这样的方法。这里列出了研究能否用产业机器人的机能要求项目。
FR1=把物体运到所定位置(过去的FR)。
FR2=把物体插入所定位置(新的FR)。
只看这个机能的要求,过去的机器人原封不动呢?或者在某种程度上提高位置精度就可以原封不动地利用呢?也许每个人都会这样想。然而,实际上如图2.5.6a所示零件偏离孔中心位置时(实际上中心完全一致是少有的)零件发生倾斜,造成堵塞而不能装配。这里,不做综合设计,按过去的机器人做法,则应当用传感器控制轴的倾斜,结果做成相当复杂而高价的机器人,而且没有融通性(能适用所有的零件),性能不好。
这里,牧野等人将过去的机器人完全否定,采用新设计(综合设计)。此处研究一下偏离位置的零件装配时的状态,可以发现如图2.5.6b所示有必要选择柔度效果的设计,即机器人的构造在水平方向上柔软(柔度大),在垂直方向上刚度高(柔度小),这样为好,于是开发了图2.5.7所示构造的机器人。
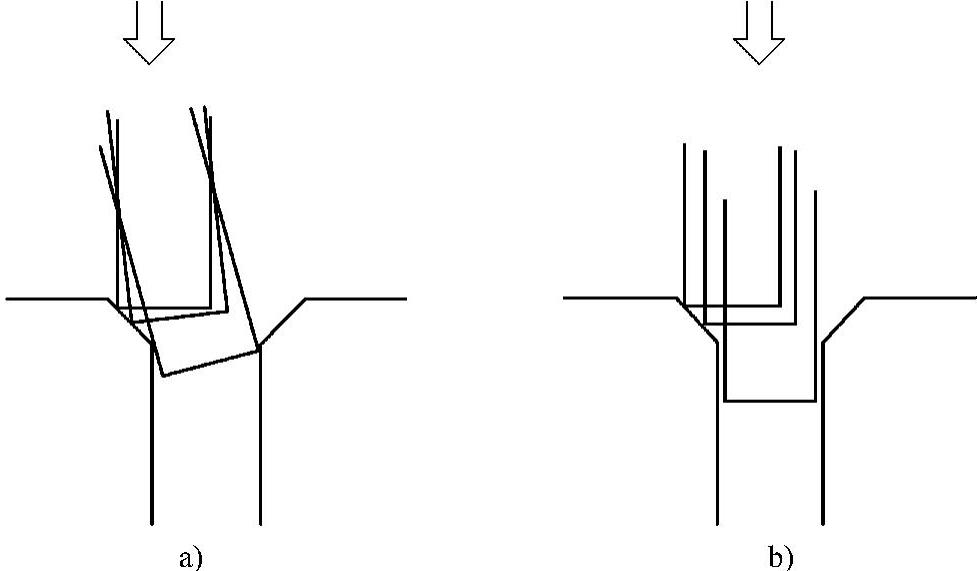
图2.5.6 选择的配合间隙的效果
a)轴的倾倒造成的堵塞 b)横向错位之配合间隙
这个构造是与过去的机器人不同的屏风形,这就是SCARA机器人。图2.5.7中θ1是直流伺服电动机,通过谐波控制,减速器转动第一轴,第二轴的尖端装有工具轴,θ1轴、θ2轴和工具轴三者平行。
θ3是步进电动机,通过有齿同步带传动旋转工具,这个部分的构造像制图器,θ3没有脉冲输入时,工具前端的位置不变,工具的姿势(方向)保持一定。
这个机器人的优点在于,和过去的装配机器人相比作业速度达4倍,价格是过去的1/3,性价比达12倍。由此可见综合设计原理的重要性。
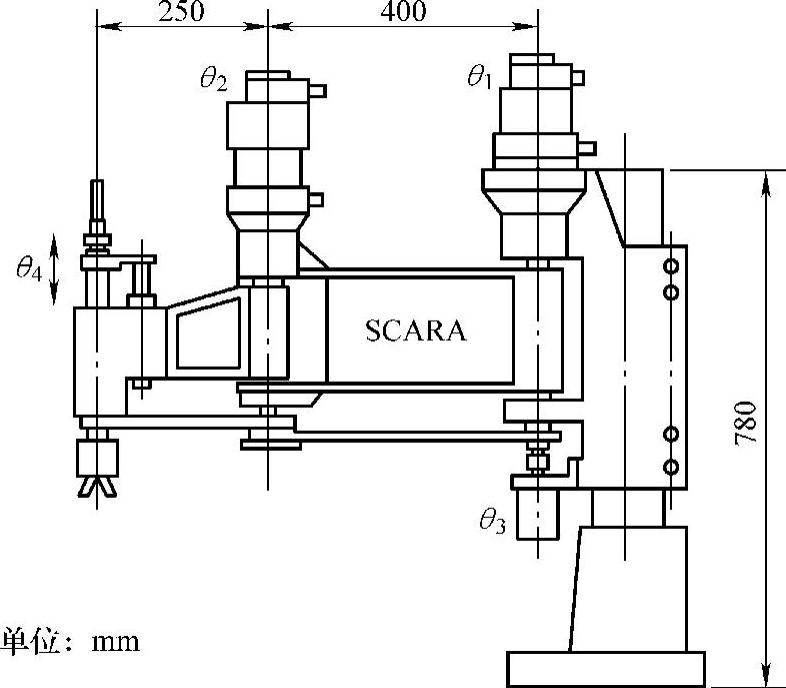
图2.5.7 SCARA机器人的构造和2号机的尺寸
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。