



定位技术是机床与装配机器等制造设备和检查、测量装置所必需的技术,是集调节传动装置、导轨、传感器及其控制系统等大范围机械电子技术之大成的结果。其中,超精密定位技术更是处于半导体制造设备顶尖地位的精密机械产业的重要基础技术之一,不仅要求有高速的运动,还要有能够处理大容量信息的能力。
图1.6.1所示为一般定位装置的构成。由直线滚动导轨和空气静压轴承等所组成的导轨来导引工作台的定位运动,由电动机等调节传动装置驱动工作台运动。图1.6.1中工作台的位置变化由传感器来测量,测出来的目标值偏差反馈到调节传动装置中,调节传动装置控制工作台,使其位置偏差值最小化。为了实现要求的精度和速度,除了必须采用合适的调节传动装置、导轨、运动传递元件、传感器和控制器之外,还必须满足多种多样的外部条件,包括振动和热变形等内外环境的干扰和影响。这都使元件的种类和机构组成日益庞大复杂,定位越来越困难。

图1.6.1 定位装置的构成
日本精密工学会超精密位置定位专门委员会截止2014年4月,已有51家公司法人会员和43名个人委员。超精密机床和与半导体有关的超精密位置定位技术的信息交流会每年召开五次。且从1986年以来每隔四年进行一次“超精密位置定位调查问卷活动”,把握定位技术的现状与发展趋势,预测现在和将来可能出现的具体问题,进行研究和分析。研究对象包括全体机械元件和测量设备,半导体检查、制造装备,超精密加工机器,机床等,还包括装配与调节设备,机器人和信息情报机器(指电脑及电脑附属设备、各种有线通信设备、无线通信设备、光纤与微波通信系统、电话、监控录像等)等,涉及领域非常广泛。本节内容主要依据2010年在日本开展的第七次调查活动的结果,来分析超精密位置定位技术的动向。
(1)回答者所关心的装备 2010年的调研对象有超精密位置定位专门委员会委员、生产自动化专门委员会委员、机床相关协会的会员等,其中79%的工程技术人员来自企业。约15%来自大专院校,约4%来自日本国内的研究部门。调研对象所关心的位置定位装备的种类如图1.6.2所示。由图可以看出,虽然对机械元件要素技术的关心有所减少,但是对其他装备的关心比例的分布广泛。这些装备的定位分解能力和定位精度,回答多在1nm到1μm之间,没有看到有特别集中的关注对象。
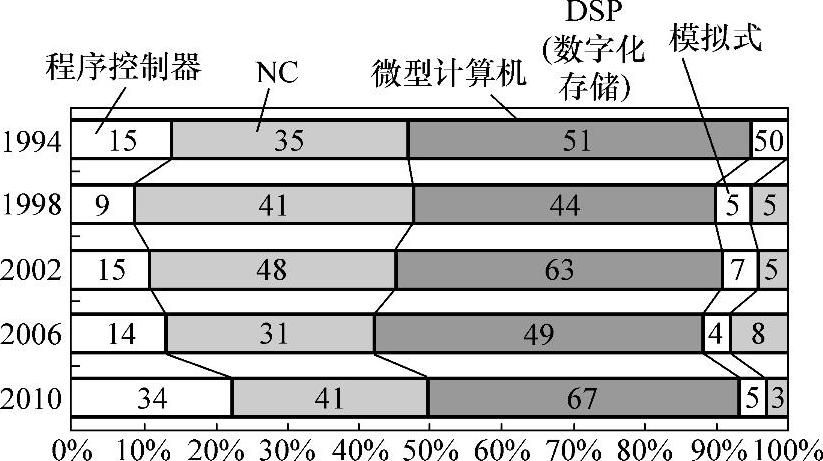
图1.6.2 位置定位装置的种类
(2)定位精度和定位分解能力的极限 在调查卷提问中并没有规定的装备对象,对于诸如“现在和今后4~5年的未来超精密定位精度及分解能力的极限达到什么程度”的提问,回答结果如图1.6.3所示。

图1.6.3 现在和将来超精密位置定位的精度及分解能力的极限
a)精度的极限 b)分解能力的极限
在图1.6.3所示的横坐标轴上,最左端表示极限的平均值,①~⑨为调研对象感兴趣的装备。大多数人认为,定位精度的极限平均为10nm,分解能力的极限约为1nm。而对于将来的预测,定位精度和分解能力的极限将达到1nm和0.1nm,即提高一个小数点级别,这是多数人的回答。
上述是调研问卷的全体平均值。图1.6.3中④、⑤、⑦的极限值进一步提高,其中对⑦的关注比较集中,认为在最近几年,机床的定位精度和分解能力(即尺寸精度分辨率)将有进一步提高。
(3)定位装置概要 调研对象兴趣主要集中在对象装备的运动形态,对单纯的直线运动和旋转运动来说,关心有所减少(1994:72%→2010:64%);而对直线+旋转的复合运动形态,多自由度装备的关心比例有所增加。作为运动形态,移动途中的路径与时间相关的连续的位置定位(Contiuous Path,CP)和伴随有在目标位置停止的间隙定位(Point-to-Point,PTP),其关心回答各占一半,不过CP方式的装备比例稍多一些(2010:CP 57%,PTP 40%)。

图1.6.4 装置的主要性能数值的分布和变迁
a)定位范围 b)可动部分的质量 c)最大移动速度 d)最大加速度
(4)位置定位装置的主要性能 图1.6.4所示为装置的主要性能数值的分布和变化。定位范围(图1.6.4a)年复一年增加,这可能是由近年来FPD(平面显示屏)等尺寸不断大型化所致。可动部分的质量(图1.6.4b)分布范围较大,这是对各种各样的装置作为对象进行回答的结果。可动部分的移动速度逐年加快,如图1.6.4c所示,特别是1m/s(60m/min)以上的回答,在2010年达到27%。最大加速度(图1.6.4d)在2002年实现了大幅度提高,之后变化平缓。直线运动机构达到1g(9.8m/s2)以上的比例,在2010年达到59%,但是,达到10g以上者比例较低,为7.9%,这说明要达到10g以上的高加速度是很困难的。
(5)位置定位装置要素的详细内容 被采用的调节传动装置、导轨、运动传递元件等的种类和所占比例的统计结果如图1.6.5所示。在图1.6.5a所示的调节传动装置中,电动机和压电、电歪[压电、电歪均为超声波工学术语。在超声波工学里,把施加电压时发生变形,或者在施加压力时产生电压的材料称为压电晶体,简称压电,如石英、陶瓷等。在电磁场作用下一些特殊材料(如镍合金)等会发生晶格歪扭变形,把在电磁场作用下材料发生变形的物理现象称为电歪。]调节传动装置占比为95%。尤其是从2002年的调研开始,直线电动机的统计比例一年比一年增加(2002年:25%→2010年:36%),而旋转型交流伺服电动机和直流伺服电动机的统计比例呈递减态势(2002年:40%→2010年:34%)。不过从2006年开始到2010年之间直线电动机和旋转电动机的比例几乎没有什么变化。这是由于各自调节传动的不同特性已经充分得到理解,且运用的领域已经固定化。比如,在高速长行程的装置中以使用直线电动机为宜,而需要推力的环境下多使用旋转电动机与滚珠丝杠的组合装置。
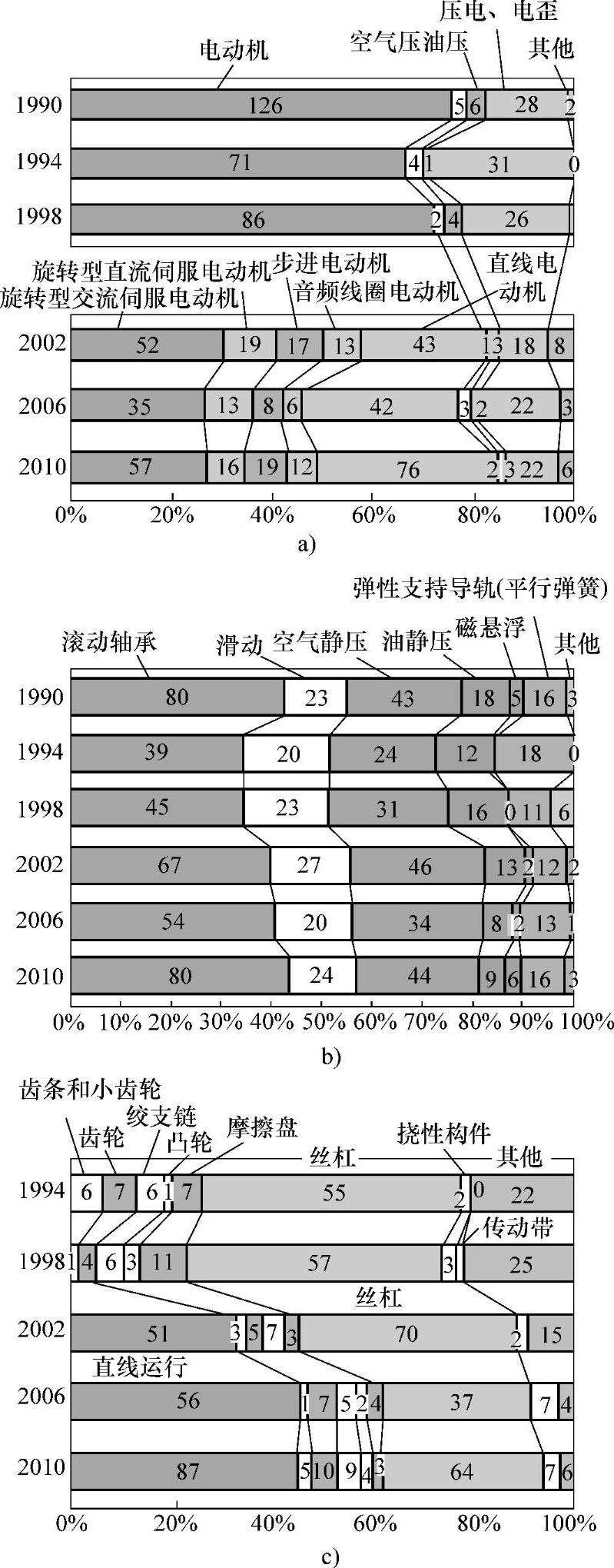
图1.6.5 被采用的主要要素的分布与变迁
a)自控执行元件 b)导轨元件 c)运动传递元件
再者,压电、电歪的使用比例从1994年的29%高峰时期降至2010年的10%,减少了1/3,这是因为即使不使用压电效应装置,电动机控制技术和传感器技术已经可以得到高的定位精度了。导轨要素(图1.6.5b)的使用比例变化不大,不过滚动导轨呈逐年增加态势(2002年:40%→2006年:41%→2010年:44%),滑动导轨呈逐年递减态势(2002年:16%→2010年:13%),油静压导轨也呈逐年下降趋势(2002年:7.7%→2010年:4.9%),采用大气尘埃污染对策和近年来的环境变化也许是其主要原因。在直线电动机问卷回答者中,2002年和2006年的调查结果有将近半数(51%)采用空气静压轴承导轨,而到了2010年此数字降到35%,与此对应的是以滚动导轨取而代之,比例显著增加(2002年:25%→2006年:37%→2010年:47%)。这是由于市场上销售的直线导轨的规格齐全,使用方便,近年来在导轨刚度和精度等的性能提高上有了长足的进步。在使用旋转电动机+滚珠丝杠的调研对象中,有六成的人使用滚动导轨,而只有两成的人使用滑动导轨,此结果和2002年的调查结果没有什么变化。
关于丝杠进给等运动传递要素(图1.6.5c),2002年在项目中追加了“直线运行”(不要运动传递元件)的选项,多数人选此项(2010年:45%)。与2006年的调查结果46%相同。虽然采用进给丝杠的比例从2002年的44%开始减少到2006年的30%,然而到了2010年又回升至33%。之所以出现上述结果,可以推测是因为直线电动机的普及已告一段落,根据用途不同,直线电动机和旋转电动机已在各自的适用领域里固定。至于进给丝杠的种类,当然大多数都采用滚珠丝杠(88%),与滑动丝杠(8%)和静压丝杠(3%)相比占压倒性优势。(https://www.xing528.com)
从图1.6.6中可以看出,位置定位所使用的传感器的种类和分解能力的历年调研情况。从2006年开始,根据编码器的种类详细划分进行统计(图1.6.6a)。虽然在1998年的调研中激光干涉计(42%)和编码器(41%)所占比例几乎相同,而在之后的年份里编码器的比例逐年递增,到了2006年,激光干涉计占18%,编码器占70%,这个数字近年来没有什么变化。编码器之中以增量式直线编码器所占比例为高(全体的36%,编码器的51%),近年来,绝对值式旋转编码器也渐有增加(2006年:5%→2010年:8.6%)。之所以编码器比激光干涉计受到欢迎,那是因为编码器的抗环境干扰能力增强,性能好。图1.6.6b所示为采用的位置传感器的分解能力统计结果。分解能力在逐年提高,1994年仅为7%,达到不足1nm的分解能力,而到2010年这个比例增加到36%。

图1.6.6 位置传感器的变迁
a)位置传感器的种类 b)位置传感器的分解能力
(6)位置定位装置的控制系统 关于控制方式,大多数的位置定位装置采用闭环控制(2010年:74%),然后是半闭环控制(14%)和开环控制(11%),以上的比例自1986年以来几乎没有什么变化。控制器如图1.6.7所示,微型计算机和DSP(Digital Signal Proces-sor,数字信号处理器)的利用最多,达到43%,而程序逻辑控制器(PLC)的利用也在逐年增加(1998年:8.7%→2010年:22%),这是因为PLC的性能提高,且相关设备更加充实。此外,信号反馈控制时所反馈的信号以变位为多数,占70%,其他如速度为23%,加速度的采用比例为3%。
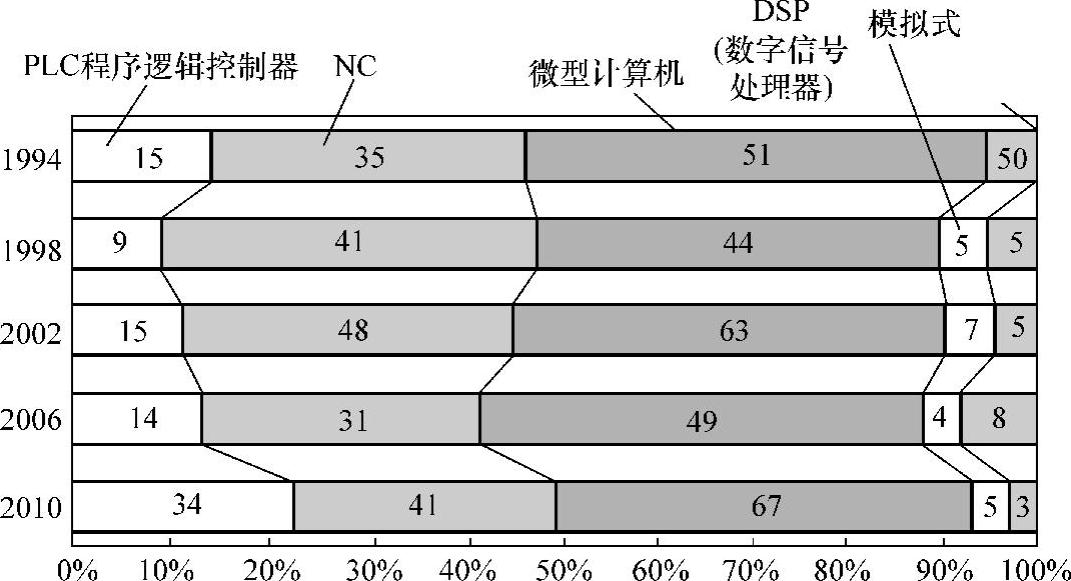
图1.6.7 控制器
关于控制理论,根据2010年的调研,经典控制理论占71%,超过了现代控制理论,虽然较1990年的73%有些变化(2002年:61%),但是基本维持在较高的比例,这是由于即使是PID控制等经典控制理论,也已经足以达到与现代控制理论相同水平的性能,并且易学好懂,调整容易。
(7)使用环境 对于调研对象是在什么样的环境下使用的问题也被列入了调研问卷。首先,有45%的被调查者回答是室温,余下的55%回答是在恒温环境。恒温室的温度设定,有64%回答为23℃,17%回答为20℃。虽然和1994年的调查结果20℃的数据差不多,近年来的节能呼声高涨,故温度增加到23℃。
关于清洁度,有39%的被调查者使用无尘空间,无尘空间的级别,一半左右(51%)为100~1000,有29%的回答级别在1000以上。至于使用防振台以消除来自地板的振动的回答,约有60%使用了防振台,其中被动型除振台和主动型除振台的比例为6∶4。
(8)位置定位装置的理想能力 以实际从事精密定位装置研究、开发和设计的人员为对象,征询其对于“在横向直线运动条件下达到误差在10nm以内精度的装置”的行程距离的意见,行程100mm~1m的回答占多数,为64%的比例,回答超过1m的在逐年增加(2002年:6.5%→2010年:20%)。关于速度,反映了高速化的倾向(1m/s以上的回答比例,2002年:9%→2006年:24%→2010年:29%),从种类上来说调节传动装置以直线电动机为最多,1998年:24%→2002年:49%→2006年:60%→2010年:65%,逐年增加,与此相应的是,采用直线运行的比例也在逐年增加,1998年:29%→2001年:51%;相反地,采用丝杠传动的比例由1998年的43%下降到2010年的13%。
导轨元器件的演变情况,从2006年的几乎有一半采用空气静压导轨,到2010年下降到30%,滚动导轨从22%上升到30%。关于传感器,1998年有55%的回答是采用激光应用传感器,到2010年减少到只有21%;与此相反的是包含直线测量在内的编码器所占比例由1998年的20%增加到2010年的59%。
(9)结束语 从1986年开始的每隔四年进行一次的以位置定位装置为对象的产业问卷调研,一直进行到2010年,长期的调研得出了下述技术动向结论:
1)现在的位置定位精度和分解能力极限各为10nm及0.1~1nm,在不久的将来,工程技术人员将可能把这个指标提高到1nm及0.1nm的水平。
2)近年来,高速驱动化和长行程距离化,是位置定位装置的趋势,导致大量采用直线电动机。
3)旋转电动机和直线电动机作为调节传动装置二分天下,各自不同的性能特点得到发挥而各得其所。
4)市场上直线滚动导轨的性能不断提高,使用者在增加。
5)定位传感器的精密尺寸高分辨能力即所谓高分解能力化越来越进步,非常适合运用到编码器上,技术实现固定化。
高精度化和高速化的要求在位置定位装置上一年比一年更严格,促使相关构造元器件的性能不断提高,与之相随而来的当然有许多新问题迎面而来。其中,环境热与振动等干扰对高精度和高速化的影响很大,节能的课题也摆在面前。从日本精密工学会超精密位置定位专门委员会的长期调研与规划工作中,我们看到了工业发达国家的一些可供参考的方面。
在工业发达国家,从事科技创新研究,经常是由市场的力量来进行的,除了国家的科技部门,更重要的是社会和市场的力量。许多科研项目涉及国计民生的重要领域时,就会出现由权威部门主导的产学研结合的组织形式。本文中的精密工学会、超精密位置定位专门委员会就是一个权威部门,在解决诸如实现高精度和高信息量处理能力的精密定位机构设计等重大课题上,起到横向联系、集体思维、归纳总结与规划的重大作用。
精密工学的研究,已经国际化,在地球人类社会中集思广益,是一种现代文明的进步。美国精密工学会(ASPE)、欧洲精密工学会(EUSPEN)和日本精密工学会(JSPE)联合发行精密工学会刊《Precision Engineering》。
作为市场上以企业为主体的竞争局面,在学术上也不例外,从事精密机械工程学研究的学术团体有很多家,比如,日本小型工作机械工业会于2012年6月更名为日本精密机械工业会(JAPMA)。日本精机学会于1987年更名为公益社团法人精密工学会,发行精密工学会刊,有会员6000人(含学生)。还有日本精密测定机器工业会、日本工作机械工业会、日本精密工学会和日本机械学会等,日本机械工学会是1934年出版发行的机械工学便览的主编团体,机械工学便览是日本企业界、学术界家喻户晓的一本工具书,经过七次改订,2014年3月丸善出版发行了最新版机械工学便览DVD-ROM版,可以说是研究精密机械工程学的基础工具书之一。
1980年被称为日本的机器人开创元年,通过产学研结合与国家、社会科技学术界组织的协调与展开,日本在纳米技术上早在1986年就开始了10年铺垫,由社团法人-日本技术士会组织该会所属的机械部门会员编写了精密位置定位机构与控制设计事例集,提供的代表设计事例达114项,聚集了精密位置定位机构的精华,遍及精密机床、机器人和宇宙空间基地等重要领域。2001年由住友重机械工业的MODEL SLHUS-310定位装置成功实现了10nm的世界第一定位精度记录,用于半导体和液晶的制造和检查装置上。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。