



机器人一词最早出现在科幻和文学作品中。1920年,一名捷克作家发表了一部名叫《罗萨姆的万能机器人》的剧本,剧中叙述了一个叫罗萨姆的公司把机器人作为人类生产的工业品推向市场,让它代替人类劳动,引起人们广泛关注。后来,这个故事被当成机器人的起源。
机器人的发展使人的思维能力不断进化,从简单的逻辑分析到现在的模糊逻辑分析;从具体的单一研究到现在模式识别的抽象研究;从对大脑思维的假设性猜想到现在的探索性实践;人工智能使人的思维能力进一步提升,也使智能机器人的发展不断前进。机器人的发展促进人工智能的研究,反过来,人工智能的发展又促进了机器人的研究。随着人的思维的进化,机器人的认识能力、分析能力、判断能力也不断地进化,大脑意识和思维可以被取代。同时机器人的进化也使人不断了解思维是如何工作的,产生了人工智能与人脑之间不断地相互推动与促进,相互依存与发展,相互融合与渗透。
古典的认识论,由培根归纳出来的就是实证主义的认识论,这种认识论强调科学的客观性,强调人对于知识的被动接受。只要人接触大量的经验,就可以通过归纳形成假说,然后再对假说进行验证,得到一定范畴内可以一般成立的科学规律,进而形成科学。这里的“归纳”只是对现象的整理,不加入科学家自己的主观判断。这种认识论强调客观性,摒弃主观的作用。今天的认识论则已经强调了知识或者科学形成的主观作用,并且做出判断;科学不是客观的,而是主观对自然、客观的认识。既然是认识,就是主观的。
我们接受来自经验世界的信息,接着不是通过对信息的简单整理、归纳,而是先验地提出假说,再通过事实检验。这里有个“先验”是个关键,是来自康德的先验认识论,通俗地说就是灵感,该灵感不与以往的经验相关,因为面对的是新现象,以往的经验无效,只是基于临时的判断、猜想。能够从经验到先验,正是人的思维特点,这种能力的大小,也是普通的科学家和科学大师的区别之所在。制约人类科学的发展正是经验到先验的这一飞跃的困难,以及实验条件。人类看到鸟儿在飞翔,突发灵感,想像鸟儿一样在空中飞。虽然人类创造了飞机,然而飞机的部件和鸟迥然不同。飞机的飞行方式与鸟的飞行方式也不尽相同。如今我们现在要开发一部与人脑类似的大脑,可是现在大脑是如何思维、如何运行的,意识、知觉、思维如何能应用在机器人的大脑里至今还无人知晓,或许,对机器人的不断认识,哪怕是任何一点进步,都意味着我们对人类的了解更多了一点。我们对机器人的认识反映了我们对自我的认识。
人始终是认识的主体,而机器人是人在某一阶段认识的物化。大脑有一整套规则来处理输入其中的感觉信息,而在这些处于思维的低级层面的规则的整体作用下,产生了处于思维的高级层面的意识。机器人也许需要某种大脑来胜任其支持者所想象的一切工作,但它并不一定需要与人类一样的大脑。他们将会把自己的知觉和记忆上传到计算机中,先进的制作技术将远远超过传统的机械手和人手的机敏程度。也许这种迂回前进的结果使机器人的行为和真正智能意识控制下的行为难以区分,做到以假乱真。比尔·盖茨预言,30年后的今天,机器人即将重复个人计算机崛起的道路。点燃机器人普及的“导火索”,这场革命必将与个人计算机一样,彻底改变这个时代的生活方式。
1980年被称为日本的机器人“元年”,经过20年的发展,1999年10月,日本使用的产业机器人已占全世界的2/3,生产的产业机器人占全世界的3/4。图1.4.1所示为当时全世界的产业机器人台数图表。
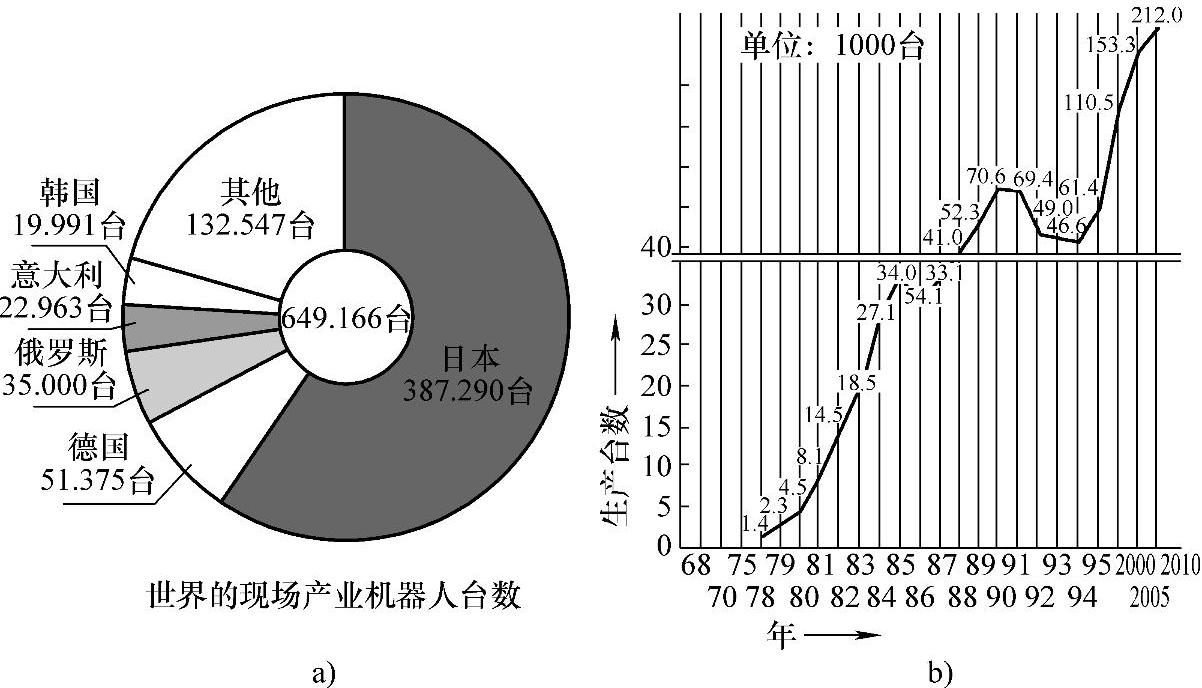
图1.4.1 世界的产业机器人台数图表
a)世界的现场产业机器人台数 b)各年度生产的机器人台数
自从1959年恩格尔伯格博士(图1.4.2),在美国康涅狄格州率先产业化制造第一台真正意义上的机器人以来,历经50多年的发展,机器人家族人丁兴旺,已进入了人类生活的各个方面,在人类历史上自动化领域出现了以机器人为代表的空前强大的科技生产力。
发明第一台机器人的正是享有“机器人之父”美誉的恩格尔伯格先生,1958年他建立了Unimation公司,并于1959年研制出了世界上第一台工业机器人,他对创建机器人工业做出了杰出的贡献。1983年,就在工业机器人销售日渐火爆的时候,恩格尔伯格和他的同事们毅然将Unima-tion公司卖给了西屋公司,并创建了TRC公司,开始研制服务机器人。
图1.4.2 恩格尔伯格博士
恩格尔伯格认为,服务机器人与人们生活密切相关,服务机器人的应用将不断改善人们的生活质量,这也正是人们追求的目标。一旦服务机器人像其他机电产品一样被人们所接受,走进千家万户,其市场将不可限量。
恩格尔伯格创建的TRC公司第一个服务机器人产品是医院用的“护士助手”机器人,它于1985年开始研制,1990年开始出售,目前已在世界各国几十家医院投入使用。“护士助手”除了出售外,还出租。由于“护士助手”的市场前景被看好,现已成立了“护士助手”机器人公司,恩格尔伯格任主席。
“护士助手”是自主式机器人,它不需要有线制导,也不需要事先做计划,一旦编好程序,它随时可以完成以下各项任务:运送医疗器材和设备,为病人送饭,送病历、报表及信件,运送药品、试验样品及试验结果,在医院内部送邮件及包裹。(https://www.xing528.com)
该机器人由行走部分、行驶控制器及大量的传感器组成。机器人可以在医院中自由行动,其速度为0.7m/s左右。机器人程序中输入了医院的建筑物地图,在确定目的地后机器人利用航线推算法导航自主地沿走廊行走,由结构光视觉传感器及全方位超声波传感器探测静止或运动物体,并对航线进行修正。它的全方位触觉传感器保证机器人不会与人和物相碰。车轮上的编码器测量它行驶过的距离。在走廊中,机器人利用墙角确定自己的位置,而在病房等较大的空间中,它可利用天花板上的反射带,通过向上观察的传感器帮助定位。需要时它还可以开门。在多层建筑物中,它可以给载人电梯打电话,并进入电梯到所要到的楼层。紧急情况下,例如某一外科医生及其病人使用电梯时,机器人可以停下来,让路,2min后它重新启动继续前进。通过“护士助手”上的菜单可以选择多个目的地,机器人有较大的荧光屏及用户友好的音响装置,用户使用起来迅捷方便。
由上述“护士助手”机器人的机能设计可以理解,这是一台多功能的自动机器。
欧美国家认为:机器人应该是由计算机控制的通过编排程序具有可以变更的多功能的自动机械,但是日本不同意这种说法。日本认为“机器人就是任何高级的自动机械”,这就把那种尚需一个人操纵的机械手包括进去了。现在,国际上对机器人的概念已经逐渐趋近一致。一般说来,人们都可以接受这种说法,即机器人是靠自身动力和控制能力来实现各种功能的一种机器。联合国标准化组织采纳了美国机器人协会给机器人下的定义:“一种可编程和多功能的,用来搬运材料、零件、工具的操作机;或是为了执行不同的任务而具有可改变和可编程动作的专门系统。”笔者认同这个定义,其实,现场长期的实践证明,这和“机器人就是任何高级的自动机械”的表达是一致的,并不矛盾,但后者更为简洁。
尽管日本的工业机器人于1966年就开发成功了,但是具有人的五感(视觉、听觉、触觉、味觉、热觉)的机器人并没有出现,距离理想化的机器人还有漫长岁月。
实际上,机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或单独完成人类的工作,例如制造业、建筑业或是危险的工作。它可以说是高级整合控制论、机械电子、计算机、材料和仿生学的产物。目前在工业、医学、农业甚至军事等领域中均有重要用途。图1.4.3所示为机器人的各种用途。
机器人能力的评价标准包括:①智能,指感觉和感知,包括记忆、运算、比较、鉴别、判断、决策、学习和逻辑推理等;②机能,指变通性、通用性或空间占有性等;③物理能,指力、速度、连续运行能力、可靠性、联用性、寿命等。因此,可以说机器人是具有生物功能的空间三维坐标机器,即最高意义上的自动化机器。
近年来,世界各国都十分重视发展服务机器人,试图抢占这一前沿科技的制高点。研究开发新型的服务机器人,用以替代抢险救援人员进入消防、煤矿、地震、电力、核工业等行业中的危险环境进行作业,辅助医生开展微创手术等活动,将成为服务机器人专项研究的重要方向,如图1.4.4~图1.4.6所示。
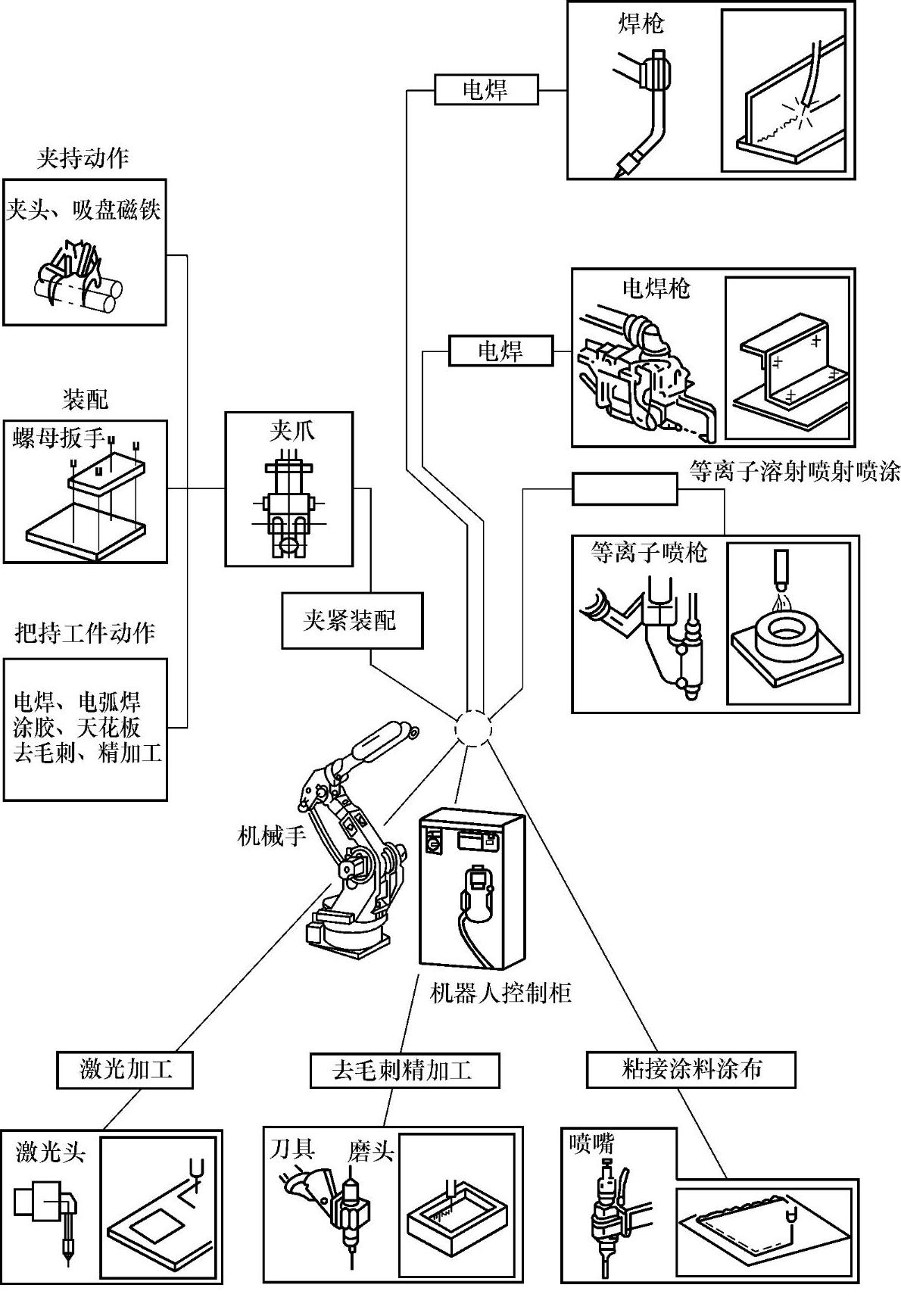
图1.4.3 机器人的各种用途
图1.4.4 本田技研工业机器人
图1.4.5 送餐机器人
图1.4.6 吹奏机器人
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。