



竞赛机器人在场地运动的过程中,路径规划控制系统具有高度不确定性,是一个多输入多输出(Multiple-Input Multiple-Output,MIMO)系统。对于这种具有高度不确定性的MIMO系统,传统的控制方法不能达到很好的控制效果。模糊推理控制方法将人类的驾驶经验融入系统控制之中,因此可以较好地满足系统自适应性、鲁棒性和实时性的要求。模糊控制方式借助模糊数学这一工具,通过推理来实现控制。模糊逻辑模拟了人类思维的模糊性,它采用与人类语言相近的语言变量进行推理,因此借助这一工具可以将人类的控制经验融入系统控制之中,使得系统可以像有经验的操作者一样去控制复杂系统。总的说来模糊控制具有以下特点:①不依赖于被控对象的精确数学模型,易于对不确定性系统进行控制;②是一种易于控制、易于掌握的较理想非线性控制器,是一种语言控制器;③抗干扰能力强,响应速度快,并对系统参数的变化有较强的鲁棒性。模糊控制器的基本结构由模糊输入接口、模糊推理及模糊输出接口三个模块组成。模糊输入接口的主要功能是实现精确量的模糊化,即把物理量的精确值转换成语言变量值。语言变量的分档根据实际情况而定,一般分为3~7档,档数越多,控制精度越高,计算量也越大。模糊推理决策机构的主要功能是模仿人的思维特征,根据总结人工控制策略取得的语言控制规则进行模糊推理,并决策出模糊输出控制量。模糊输出接口的主要功能是把模糊输出量转化为精确量,施于被控对象。
模糊控制系统结构如图7-13所示,其与传统控制系统最大的区别在于采用了模糊控制器。
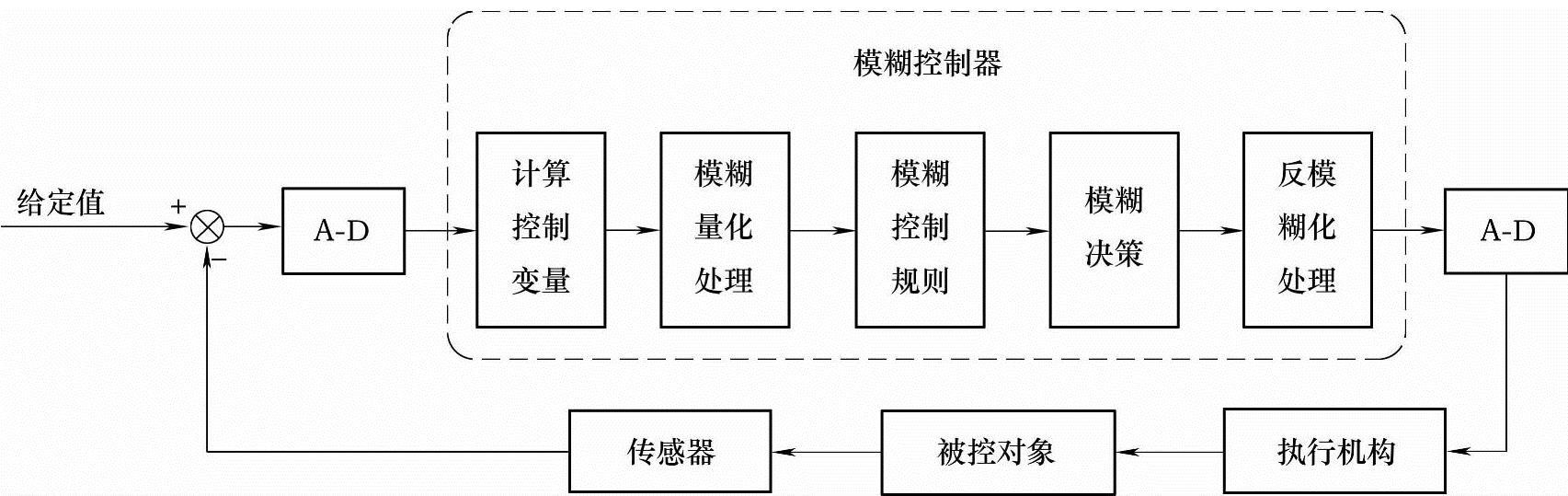
图7-13 模糊控制系统结构图(https://www.xing528.com)
模糊控制器主要由模糊化、知识库、模糊推理和清晰化这四部分组成,如图7-14所示。首先把输入的精确量转换成模糊量;知识库包含了具体应用领域的知识和要求的控制目标和规则等,由数据库和模糊规则库两部分组成;模糊推理是模糊控制器的核心,它具有模拟人的模糊概念推理能力,输入量经由模糊推理得到模糊控制量;再经过解模糊变换为用于实际控制的清晰量,作用于被控对象。
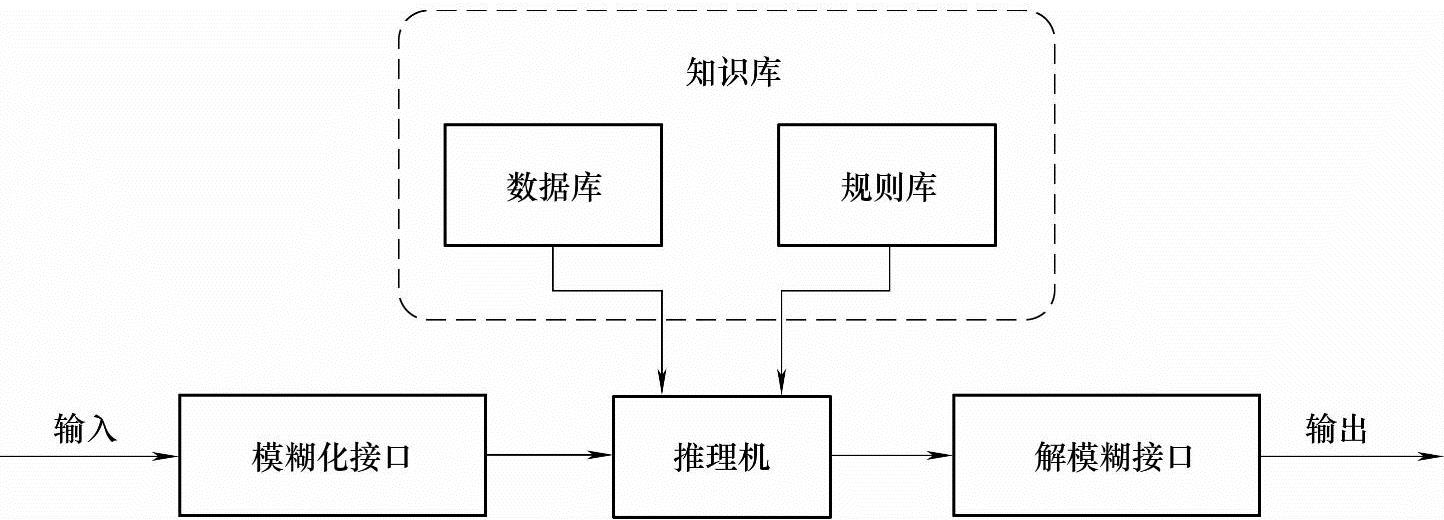
图7-14 模糊控制器主要组成结构
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。