



由于微分作用是在相邻的采样周期内进行的,因此它的强弱不仅与微分时间TD,放大系数KP有关,而且与采样周期T也有明显关系。当T太小时,两次采样之间被控参数的变化一般也不会太大,因而微分作用较弱。所以通过增加微分时间TD和放大系数KP来加强采样周期内的微分作用,这样一来,系统的稳定性及抗干扰能力就会减弱,所以对微分项的改进应该从减少干扰与降低数据误差下手。
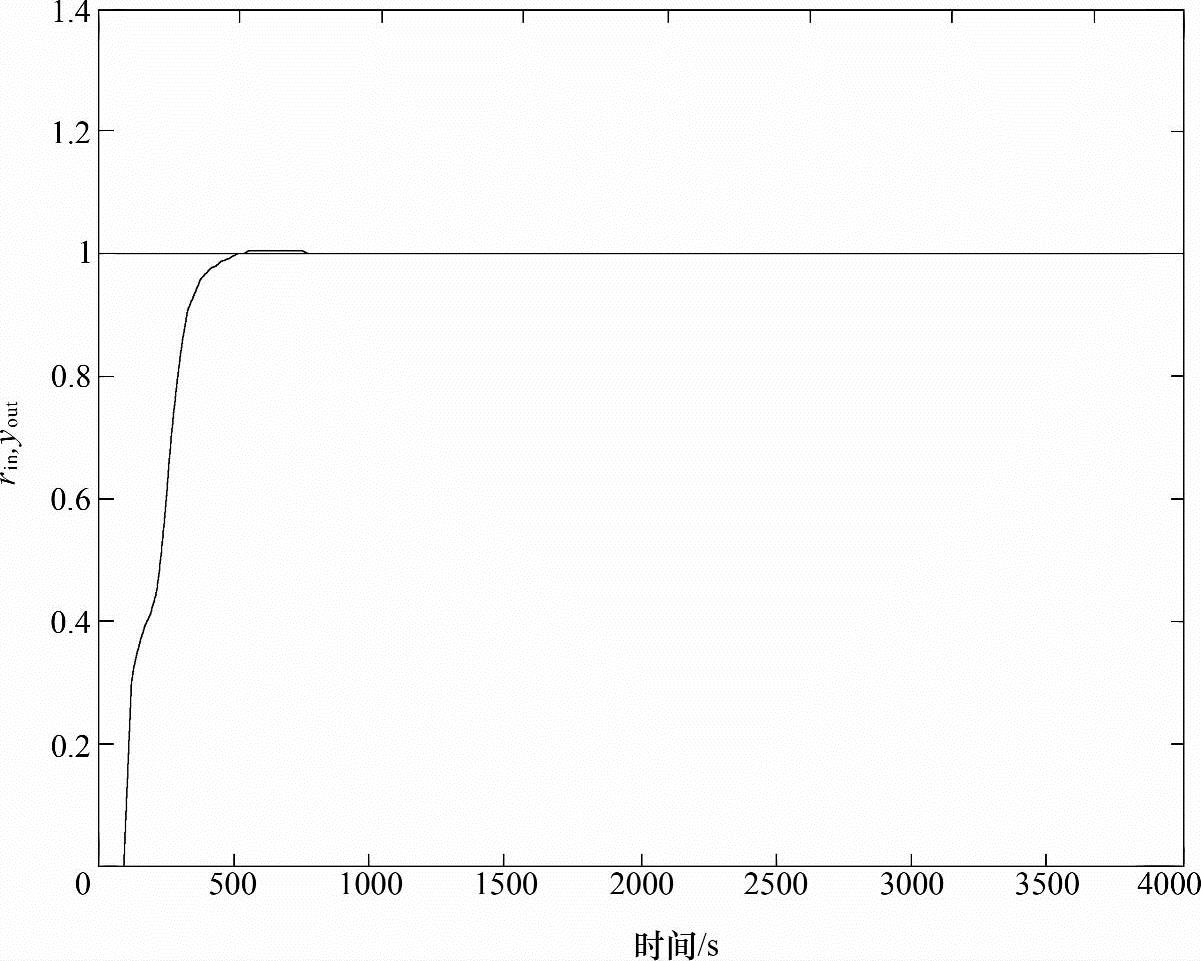
图7-11 采用变速积分控制的阶跃响应曲线
1.偏差平均
偏差平均的公式为

式中,平均项数m取决于被控对象的特性。一般流量信号m取10,压力信号m取5,温度等缓慢变化的信号m取2或1。
2.测量值微分
当控制系统的给定值r(n)发生阶跃变化时,微分动作将导致控制量u(n)的大幅变化,这样不利于生产的稳定操作。因此,在微分项中不考虑给定值r(n),只对测量值y(n)(即被控量)进行微分。考虑到在正反作用下,偏差的计算方法不同,即(https://www.xing528.com)
e(n)=y(n)-r(n)(正作用) (7-14a)
e(n)=r(n)-y(n)(反作用) (7-14b)
参照式(7-6)中的微分项
ΔuD(n)=KD[e(n)-2e(n-1)+e(n-2)] (7-15)
改进后的微分项算式为
ΔuD(n)=KD[y(n)-2y(n-1)+y(n-2)](正作用) (7-16a)
ΔuD(n)=KD[r(n)-2r(n-1)+r(n-2)](反作用) (7-16b)
必须注意,对串级控制的副级控制的副调节器而言,因给定值是主调节器的输出控制量,故上述仅对测量值进行微分的做法并不适用,仍应按原微分项算式(7-15)对偏差进行微分。测量值微分也称微分先行。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。