



【摘要】:采用普通PID控制的阶跃响应曲线如图7-10所示,积分速率采用变速积分控制的阶跃响应曲线如图7-11所示。图7-10 普通PID控制的阶跃响应曲线由图7-10和图7-11的仿真结果可以看出,变速积分使得系统的调节时间有所减小,稳定精度有所提高。
1.积分分离
积分分离PID算法是在偏差较大时,为避免超调量过大而导致系统响应时间延长,暂时取消积分作用;当偏差值小于设定阀值时,再重新投入积分作用以保证系统的控制精度。
积分分离PID控制算法的表达式为

式中,Ts为采样周期;β为积分分离的开关系数,根据公式 ,ε值的确定要根据实际系统来定。若ε值过大,则达不到积分分离的目的;若ε值过小,则会导致系统无法进入积分区,从而使系统出现余差。
,ε值的确定要根据实际系统来定。若ε值过大,则达不到积分分离的目的;若ε值过小,则会导致系统无法进入积分区,从而使系统出现余差。
采用普通PID控制的阶跃响应曲线如图7-8所示。采用积分分离PID的阶跃响应曲线如图7-9所示。
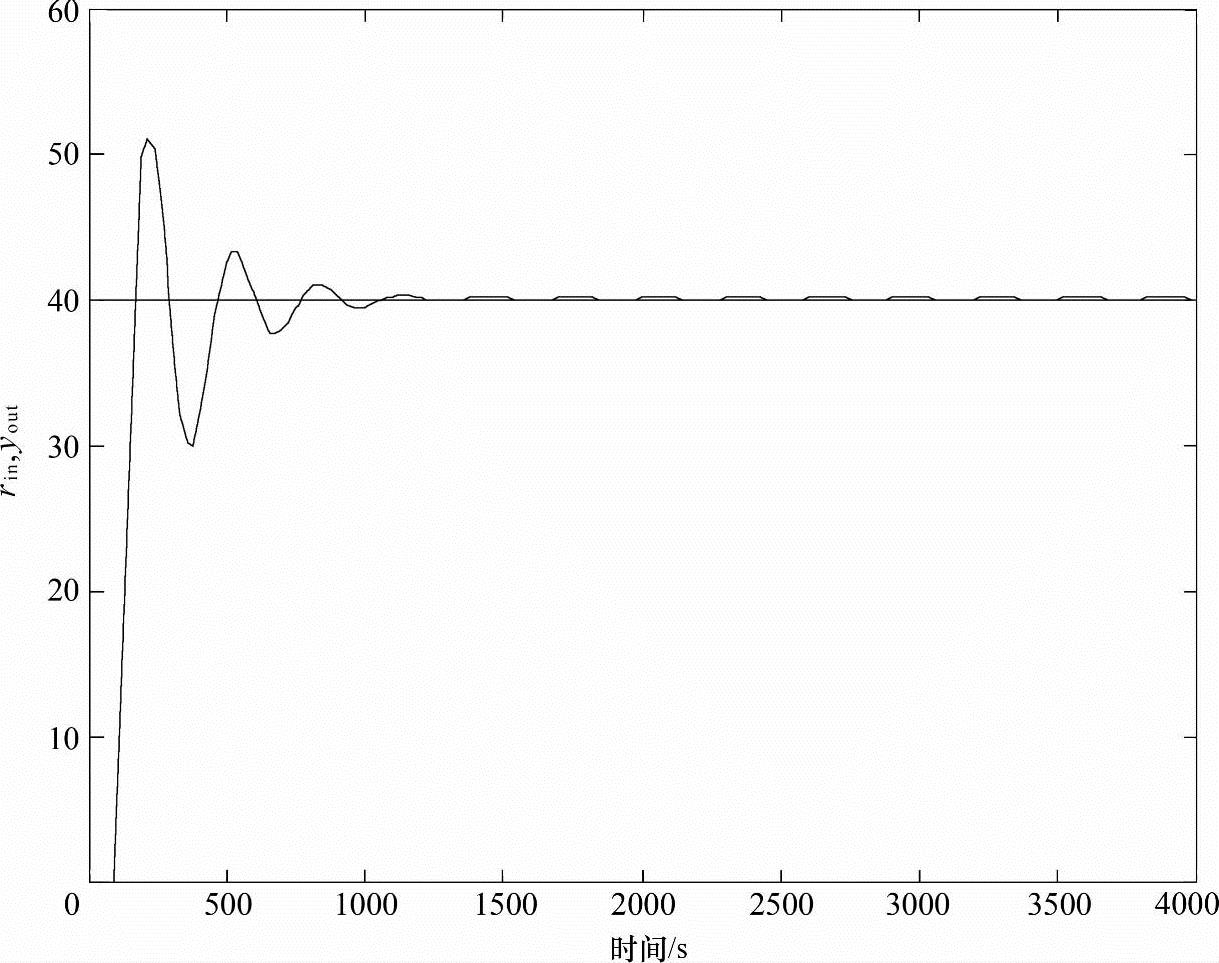
图7-8 普通PID控制的阶跃响应曲线
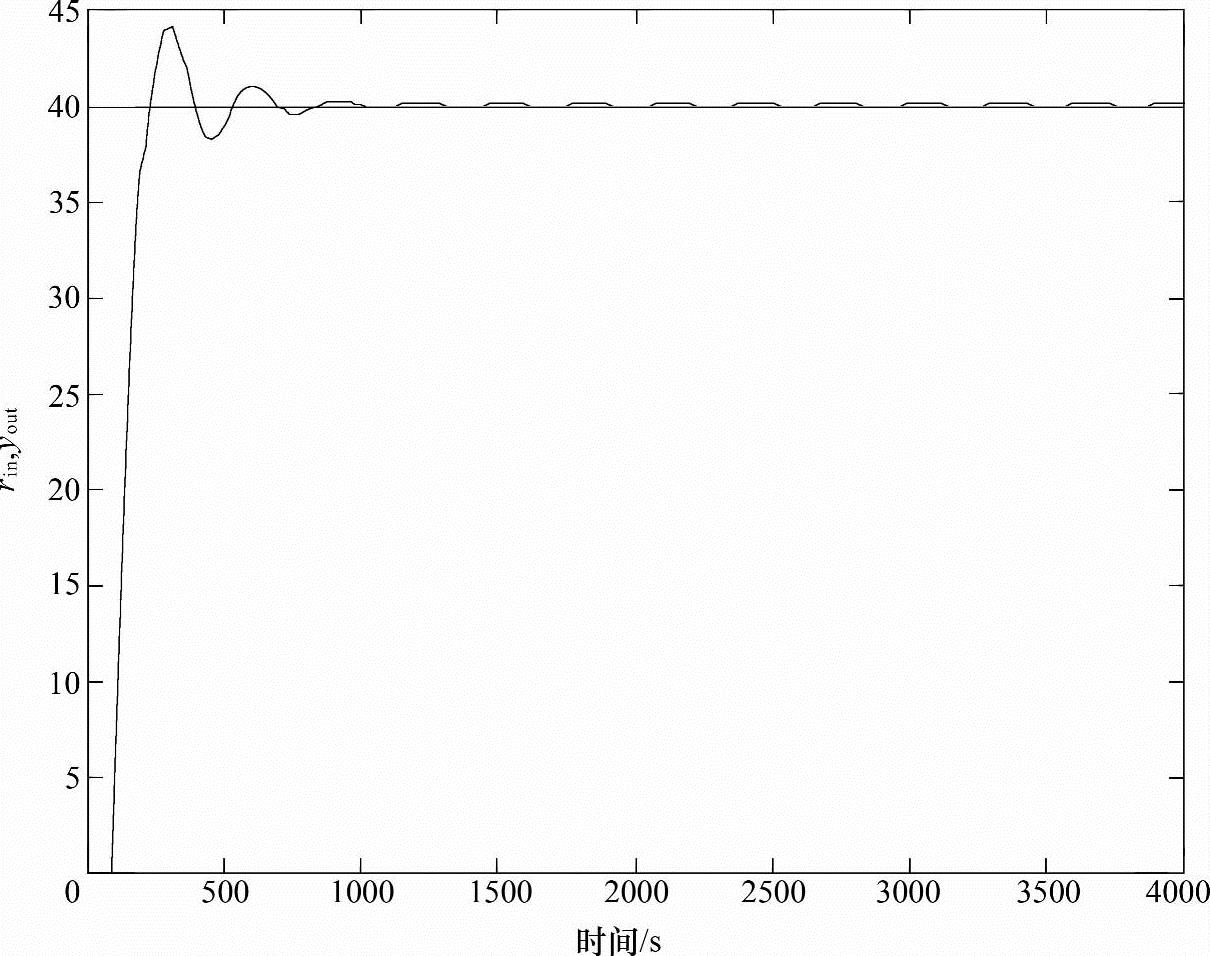
图7-9 采用积分分离PID的阶跃响应曲线(https://www.xing528.com)
从仿真结果可以看到系统的精度很好,采用积分分离PID控制算法,系统的控制效果有很大的改善。因此本系统可以应用于各种对精度要求较高的控制场合。
2.变速积分
变速积分PID算法的积分项表达形式如下:

式中,系数f[e(k)]为e(k)的函数;当|e(k)|增大时,f[e(k)]减小,反之则增大。
变速积分PID算法的基本思路是,根据偏差的大小,相应改变积分项累加的速度,偏差越大,积分越慢;偏差越小,积分越快。变速积分PID算法能较好地解决标准PID算法中积分系数取大会产生超调,甚至积分饱和;取小则又延长了消除静差的时间的矛盾。采用普通PID控制的阶跃响应曲线如图7-10所示,积分速率采用变速积分控制的阶跃响应曲线如图7-11所示。
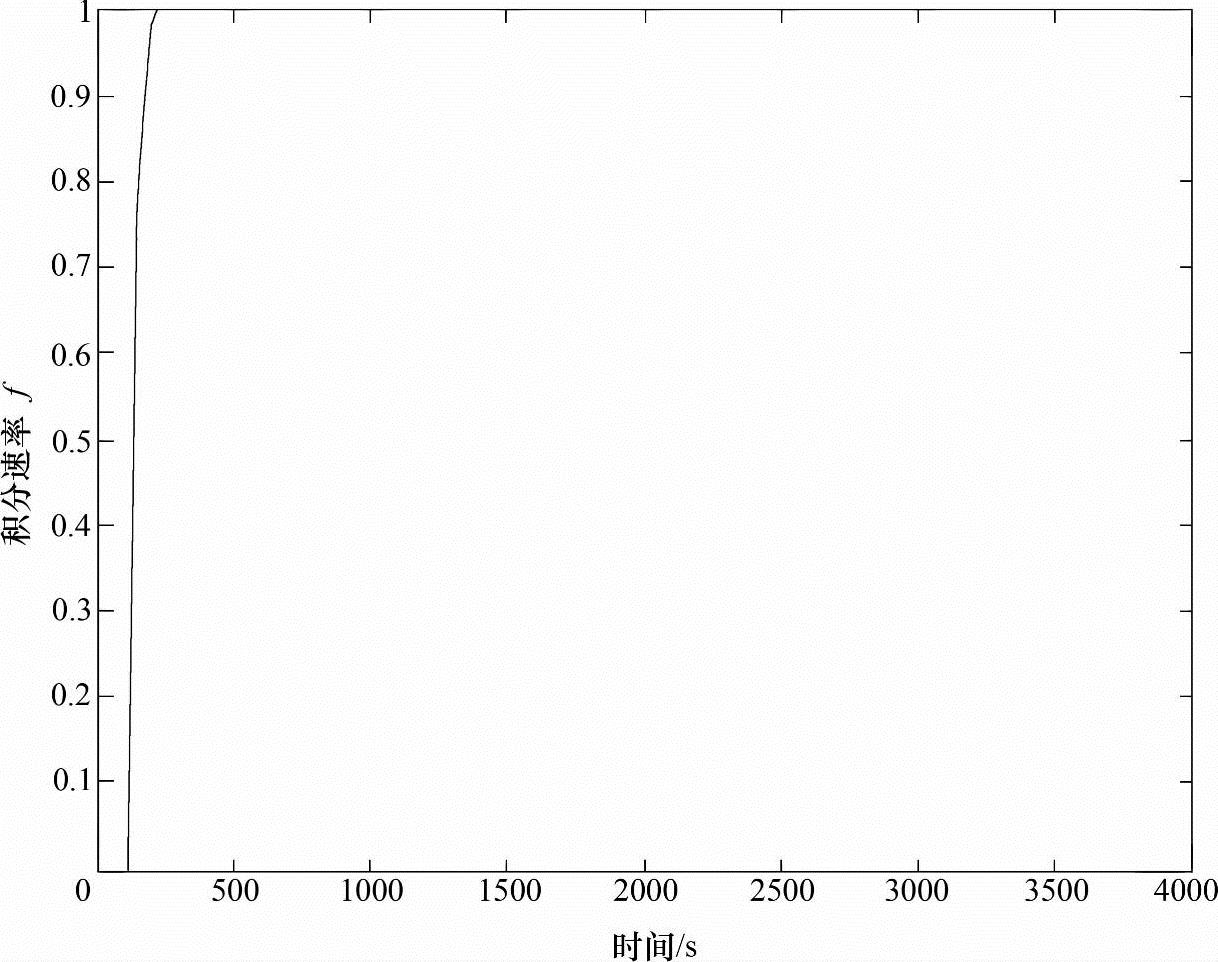
图7-10 普通PID控制的阶跃响应曲线
由图7-10和图7-11的仿真结果可以看出,变速积分使得系统的调节时间有所减小,稳定精度有所提高。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。