



【摘要】:根据竞赛机器人平台所要实现的功能,对单片机引脚资源进行分配,PIC16F877A单片机引脚排列如图6-1所示。图6-1 PIC16F877A单片机的引脚排列1.竞赛机器人控制系统中的输入信号1)遥控器来的四个按键A、B、C、D信号:forward、back、left、hight(开关量)。
PICmicro系列芯片典型的I/O引脚既能作为输入,又能作为输出,在输出模式下,这些引脚大约可以提供或者接受20mA的电流。根据竞赛机器人平台所要实现的功能,对单片机引脚资源进行分配,PIC16F877A单片机引脚排列如图6-1所示。
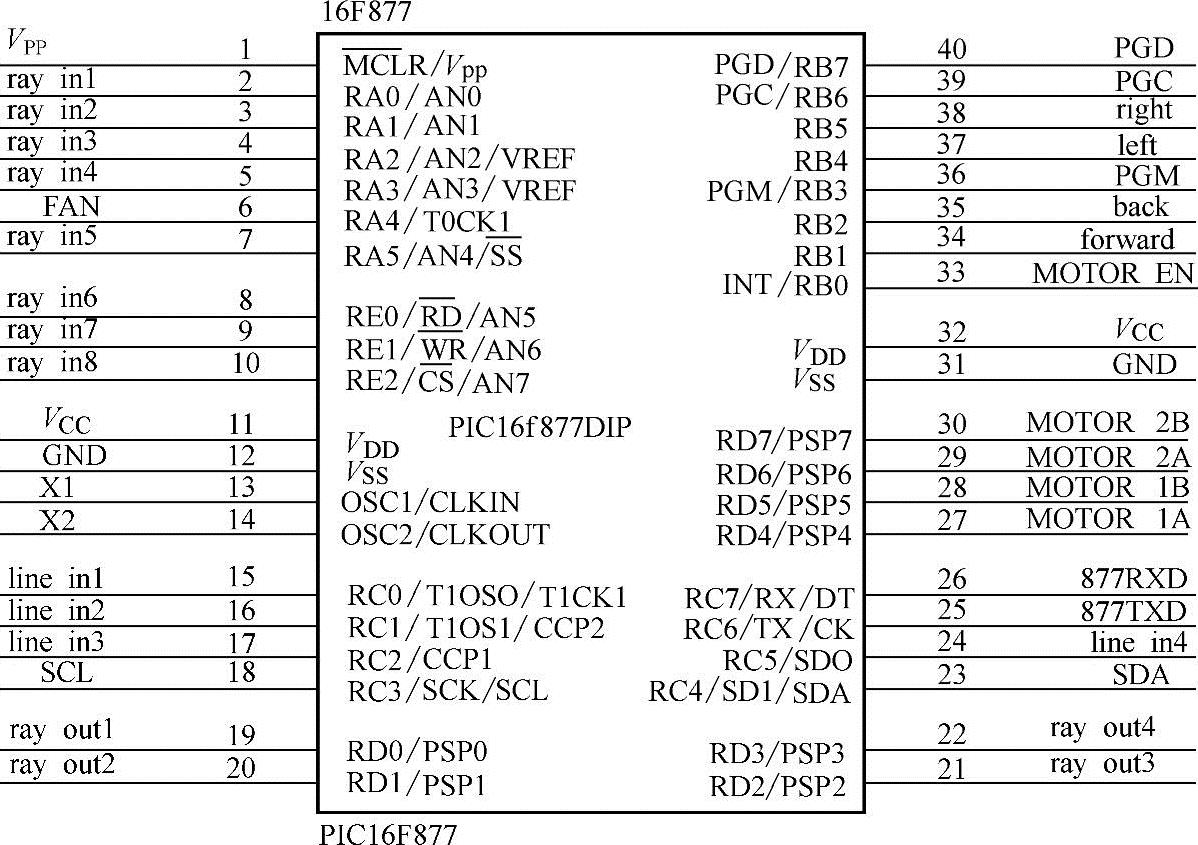
图6-1 PIC16F877A单片机的引脚排列
1.竞赛机器人控制系统中的输入信号
1)遥控器来的四个按键A、B、C、D信号:forward、back、left、hight(开关量)。
2)驱动板来的四个色差传感器信号:line_in1、line_in2、line_in3、line_in4(开关量)。
3)控制板上的四路红外传感器信号:ray_in1、ray_in2、ray_in3、ray_in4(模拟量)。
4)四路预留的火焰传感器信号:ray_in5、ray_in6、ray_in7、ray_in8(模拟量)。
2.输出信号
1)四路控制红外发射管的信号:ray_out1、ray_out2、ray_out3、ray_out4(开关量)。(https://www.xing528.com)
2)五个控制电动机的信号:motor_en、motor_1a、motor_1b、motor_2a、motor_2b(开关量)。
3)预留的灭火风扇驱动信号:fan(开关量)。
3.I2C总线信号
SDA(串行数据)信号及SCL(串行时钟)信号。
4.程序下载及在线调试端口
PGD、PGC、PGM端口。
5.RS232串口通信信号
TX、RX。
说明:所谓开关量就是对应0、1两种状态,即低电平和高电平。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。