



经过改造后的舵机相当于带减速箱的直流电动机。由于舵机的性能优越,舵机的一致性好,当两个电动机加同样的电压时,电动机的转速基本一致,误差很小。直流电动机的物理模型如图5-1所示。其中,固定部分有磁铁,这里称作主磁极;固定部分还有电刷。转动部分有环形铁心和绕在环形铁心上的绕组。图5-1表示一台最简单的两极直流电动机模型,它的固定部分(定子)上,装设了一对直流励磁的静止的主磁极N和S,在旋转部分(转子)上装设电枢铁心。定子与转子之间有一气隙。在电枢铁心上放置了由导体连成的电枢线圈,线圈的首端和末端分别连到两个圆弧形的铜片上,此铜片称为换向片。换向片之间互相绝缘,由换向片构成的整体称为换向器。换向器固定在转轴上,换向片与转轴之间亦互相绝缘。在换向片上放置着一对固定不动的电刷B1和B2,当电枢旋转时,电枢线圈通过换向片和电刷与外电路接通。
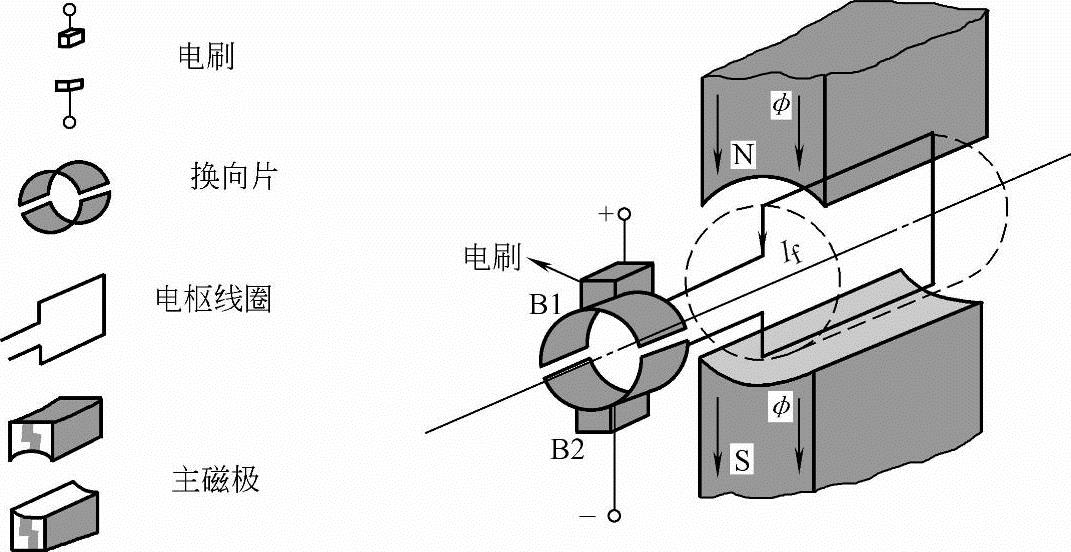
图5-1 直流电动机的物理模型
设原动机拖动转子转速为n,电动机内部的固定部分要有磁场。这个磁场是由图5-1所示的永久磁铁和磁极铁心上绕套的线圈,再通过直流电产生的。其中,If为励磁电流。这种线圈每个磁极上有一个,也就是,电动机有几个磁极就有几个励磁线圈,这几个线圈串联(或并联)起来就构成了励磁绕组。这里要注意各线圈通过电流的方向不可出错。在以上条件下环外导体将感应电动势,其大小与磁通密度B、导体的有效长度l和导体切割磁场速度v三者的乘积成正比,其方向用右手定则判断。对某一根转子导体的电动势性质是交流电,而经电刷输出的电动势却是直流电了。这便是直流电动机的工作原理。
竞赛机器人的电动机需要正反转控制,为此这里采用L298双通道直流电动机驱动芯片来驱动。L298是一块单片集成电路,有两种封装形式:15脚直立封装(Multiwatt15)和20脚贴片封装(PowerSO20),如图5-2所示。L298是双H桥高电压大电流功率集成电路,可以用来驱动2个直流电动机,也可以用来驱动感性负载,如继电器、电磁阀、步进电动机等。采用L298作为电动机驱动电路,可靠性高,可以方便地控制电动机的正反转。
L298有两个独立的使能端,其内部框图如图5-3所示。

图5-2 L298的两种封装形式
a)Multiwatt15 b)PowerSO20
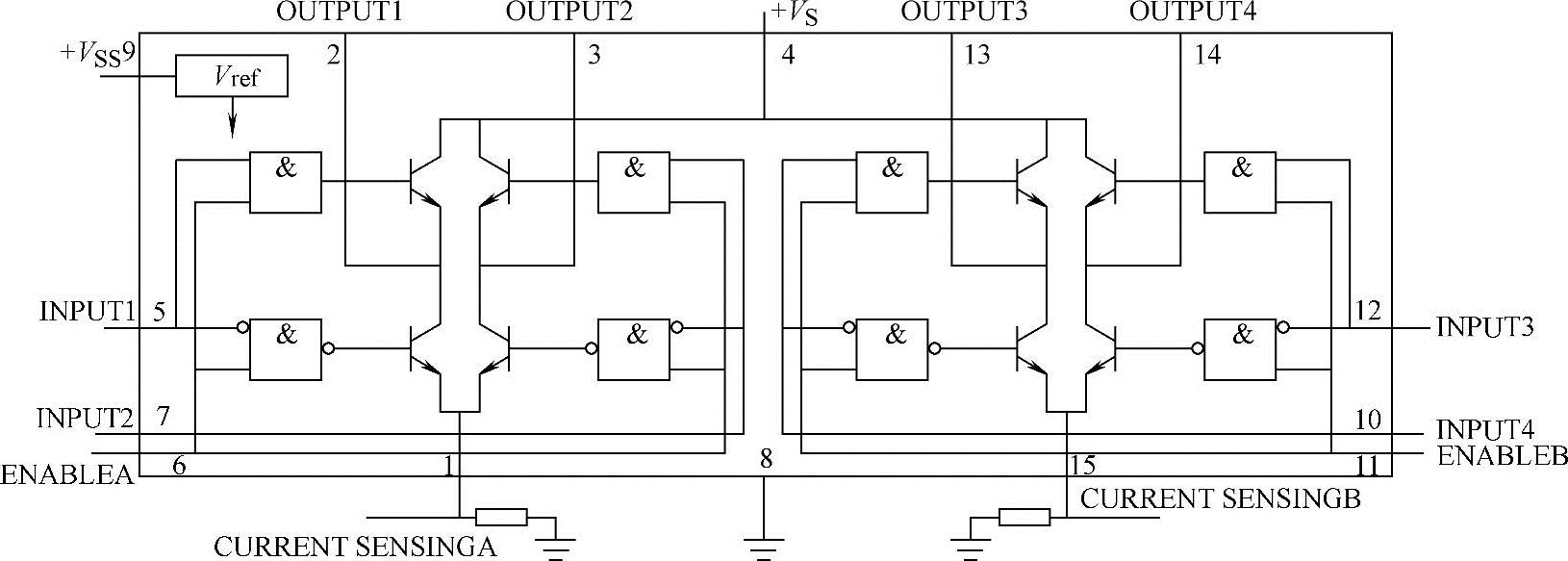
图5-3 L298内部框图
L298引脚排列如图5-4所示。特别要注意图中看起来是短的引脚,实际是弯的引脚。
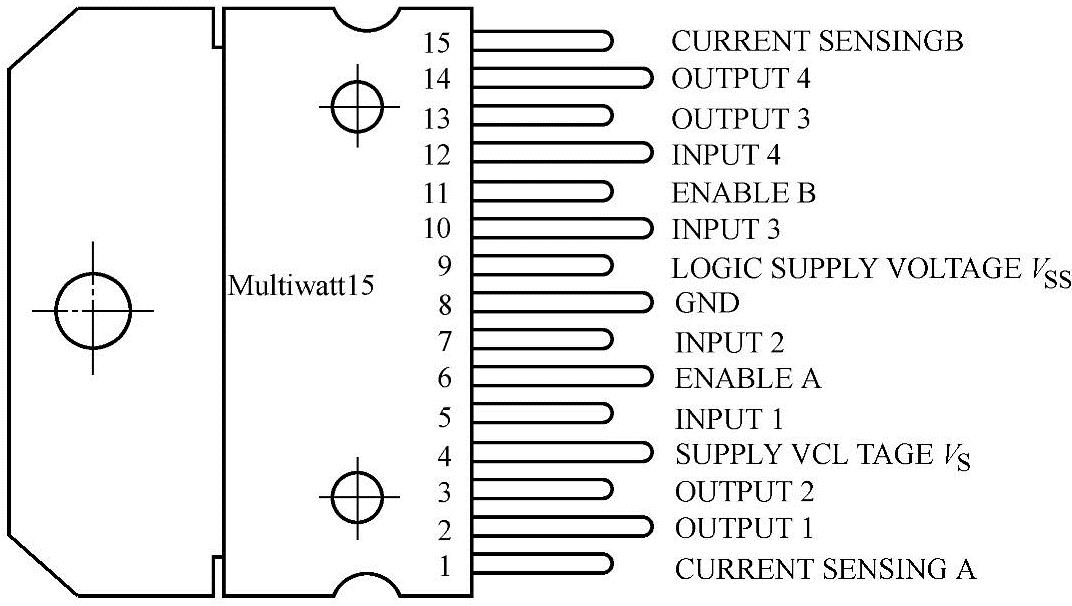
图5-4 L298的引脚排列
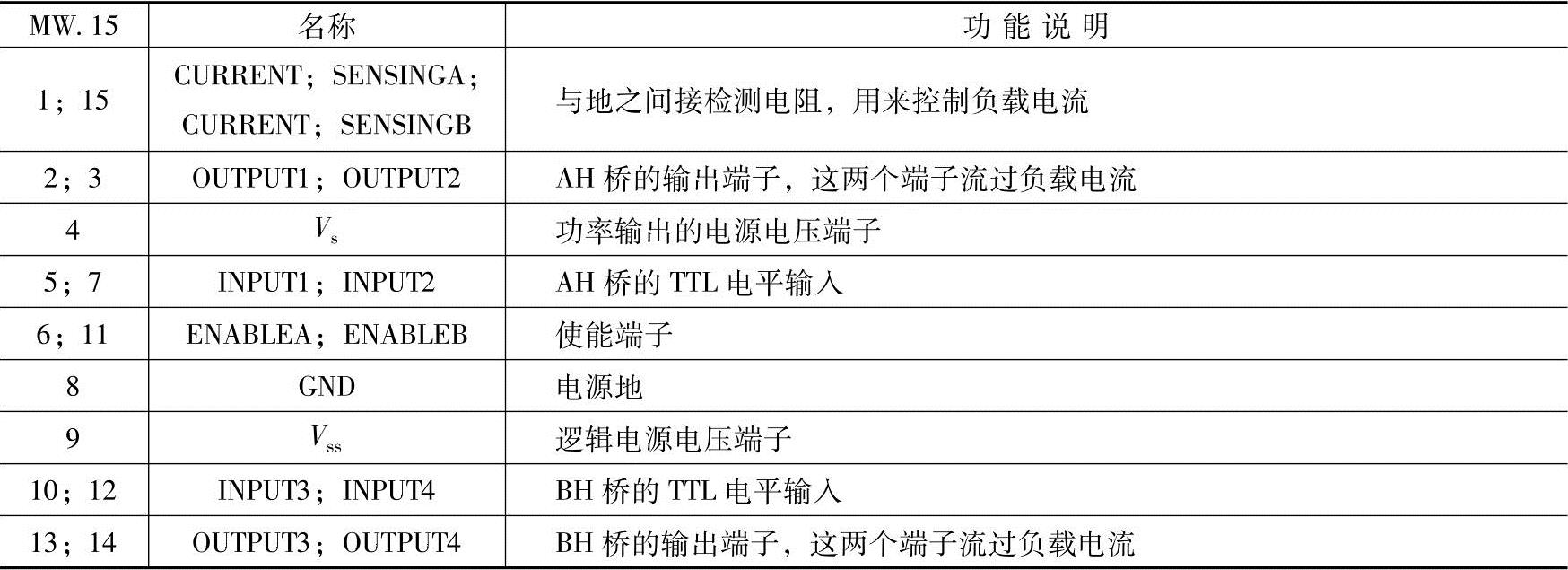
L298引脚名称和功能见表5-1。
表5-1 L298引脚名称和功能
 (https://www.xing528.com)
(https://www.xing528.com)
L298内部设计了两个可以接受标准的TTL逻辑电平的高工作电压、高工作电流的全H桥驱动电路。功率电源电压Vs范围为2.5~46V,逻辑电源电压Vss工作范围:5~7V。最大静态工作电流是70mA(Vs=42V,Vss=5V,Tj=25℃)。
L298的主要参数:
1)允许驱动电压:Vs=50V;
2)允许控制电压:Vss=50V;
3)直流允许输出电流:IO(MAX)=2A;
4)直流最大允许尖峰电流:IO(peak)=3A(t=100μs);
5)允许采样电压:VSENSE=-1~2.3V;
6)允许功耗:Ptot=25W(TCASE=75℃)。
注意:L298每一路输出正常可以提供2A的电流,峰值电流(100μs之内)可达4A。
竞赛机器人的驱动电路如图5-5所示。
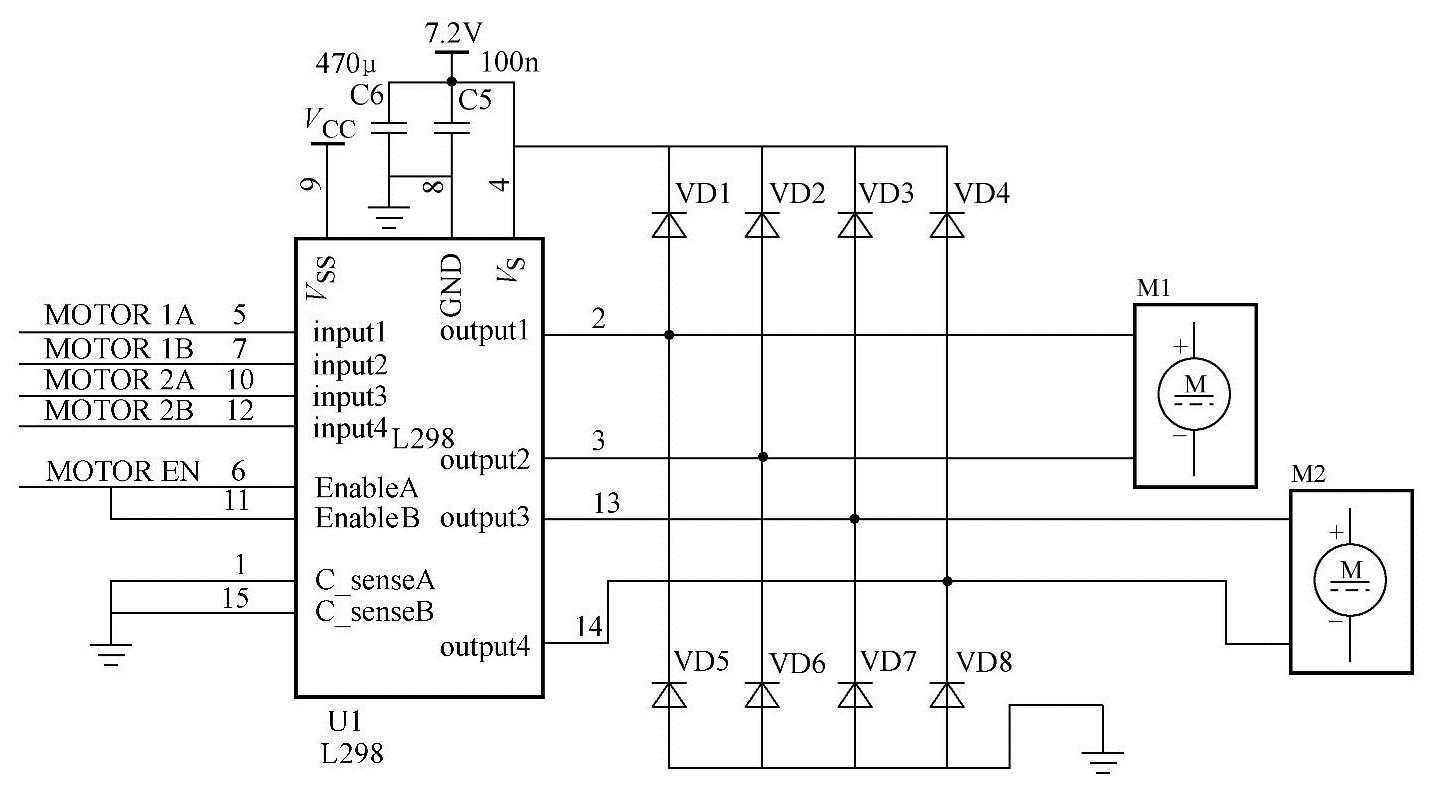
图5-5 竞赛机器人的驱动电路
其中,M1、M2是直流电动机;VD1~VD8是整流二极管。当Enable A和Enable B使能端为高电平、输入端input1、input2分别为1、0时,M1正转;input1、input2分别为0、1时,M1反转。同理input3、input4分别为1、0时,M2正转;input3、input4分别为0、1时,M2反转。竞赛机器人的运动状态见表5-2。
表5-2 竞赛机器人的运动状态
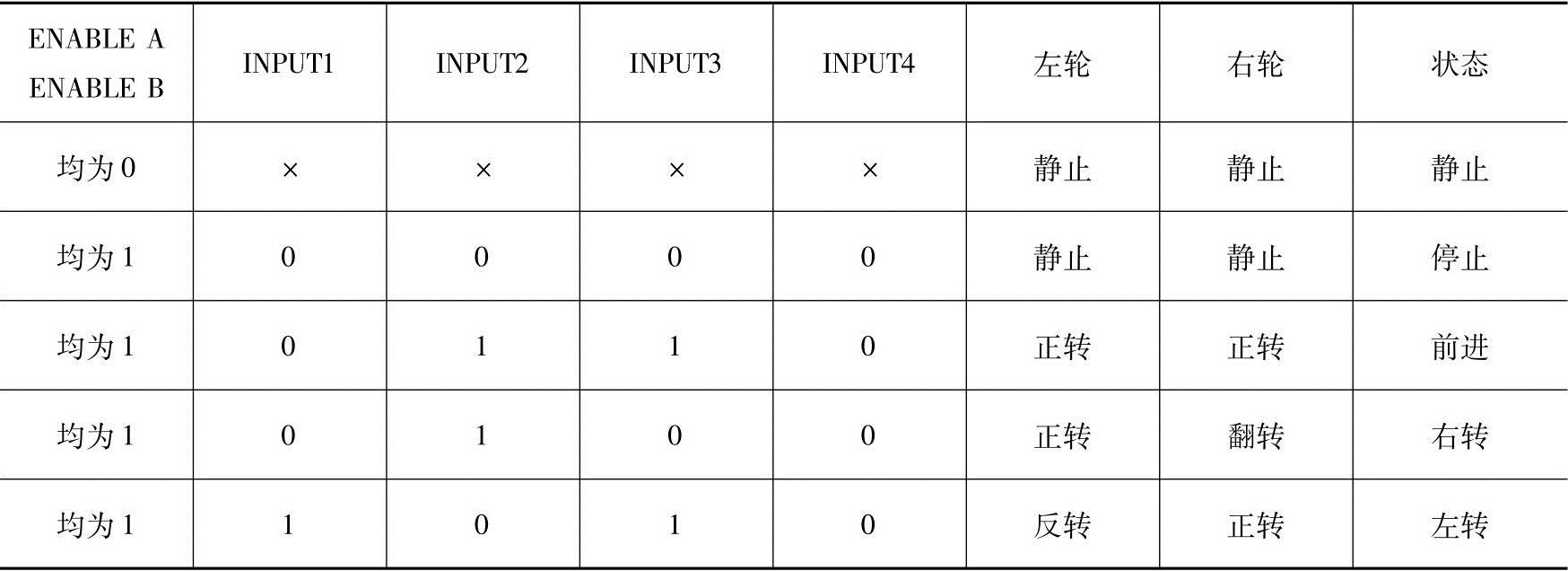
注:0为低电平,1为高电平,×为任意电平。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。