



行走机构,也称为机器人的下肢,是机器人的关键部分,主要用来承受体重和完成位移,它决定着机器人能否迅速灵活地移动,能否准确地按照操作者的意愿到达指定点。
机器人的行走机构首先要体现稳定性,其次是灵活性。很多工业机器人都不具备行走机构,它们在固定的位置完成固定的动作,因此只需要一个机械臂,也就是我们说的执行机构。但是当生产过程需要一个机器人在较大的范围内工作时,如果不具备行走机构,那么它的体积将非常庞大;如果安置了行走机构,可以使它做适当的位移,在工作范围的不同区间工作,可以节约空间、提高效率。对于竞赛机器人平台来说,行走机构是必不可少的。
机器人的行走方式主要有三种:足式行走、履带式行走和轮式行走。轮式行走机构由滚动摩擦代替滑动摩擦,主要的特点是效率高,适合在平坦的路面上移动,定位准确,而且重量较轻,制作简单。在各类机器人竞赛中,场地通常比较固定,路面状况好,而且又对参赛机器人重量上有限制,所以轮式机器人可以发挥出它高效率的特点,在机器人竞赛中使用得最多。下面就轮式行走方式进行讨论。在机器人的设计中一般常用的轮式结构布置有以下几种:
1.三轮式车体
三轮式车体的两个驱动轮安装在前边的两侧,只在后端装有一个从动轮,位于两驱动轮的中垂线上,构成三点布置型式,如图4-5所示。使用三个轮的优点是所有的车轮都会着地,不会产生悬空现象,控制稳定。但当机器人重心偏移时,如转弯、相撞等,由于只有三个轮子支撑车体,稳定性不好。
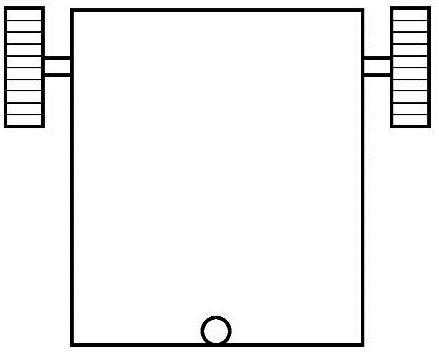
图4-5 三轮式(https://www.xing528.com)
2.四轮式车体
四轮式车体四个轮子位于车体的四个角,前边是驱动轮,后边是从动轮,如图4-6所示。较三轮车体来说,四个轮子可以更好地支撑车体,行走稳定,当重心偏移时,左右晃动小。但如果某个车轮的中心不正,或是安装高度有误差,可能导致四个车轮不能同时着地,使控制困难。所以在安装车轮时,一定要保证驱动轮绝对着地。
3.对称四轮式车体
对称四轮式如图4-6所示,与一般四轮式车体相比,两个驱动轮前移,安装在前后两侧的中线上,两个从动轮前后各一个,四个轮子安装呈“十”字形,如图4-7所示。由于四个轮不是安装在车体的四个角,支撑的稳定性不如图4-6所示的四轮式车体。但是,车体是前后对称的,某些机器人只要求底盘是前后对称的(如要求原地转弯),可采用此驱动方式。由于小车是靠驱动轮与地面产生附着力改变运动状态,因此不论何种布置形式,在小车的运动过程中的某一瞬时状态只能是三点支撑。即要么前一个被动支撑轮与两个驱动轮同时着地,要么后一个被动支撑轮与两个驱动轮同时着地。虽然,由于驱动轮上轮胎的弹性会使得在小车的运动过程中的某一瞬时呈现四轮着地的现象,但这种情况应尽量避免出现,多一个被动支撑轮着地只会增加小车与地面的摩擦力,从而消耗更多的能量(由于小车尺寸受到严格限制,车载能量是有限的)。在小车的运动过程中,绝对不允许出现两个驱动轮离开地面的现象。竞赛机器人平台是集多种功能于一身的,要求机器人平台可以原地左转或者原地右转,为了保证机器人在转弯过程中的灵活性,这里选择了对称四轮式车体结构。
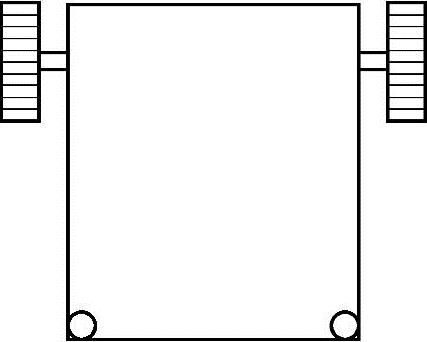
图4-6 四轮式
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。