



所谓的串行处理结构是指机器人的控制算法是由串行机来处理。对于这种类型的控制器,从计算机结构、控制方式来划分,又可分为以下几种:
1.单CPU结构、集中控制方式
用一台功能较强的计算机实现全部控制功能。在早期的机器人中,如Hero-I、Robot-I等,就采用这种结构,但控制过程中需要许多计算(如坐标变换),因此这种控制结构速度较慢,实时性差、难以扩展,其构成框图如图2-1所示。
2.两级CPU结构、主从式控制方式
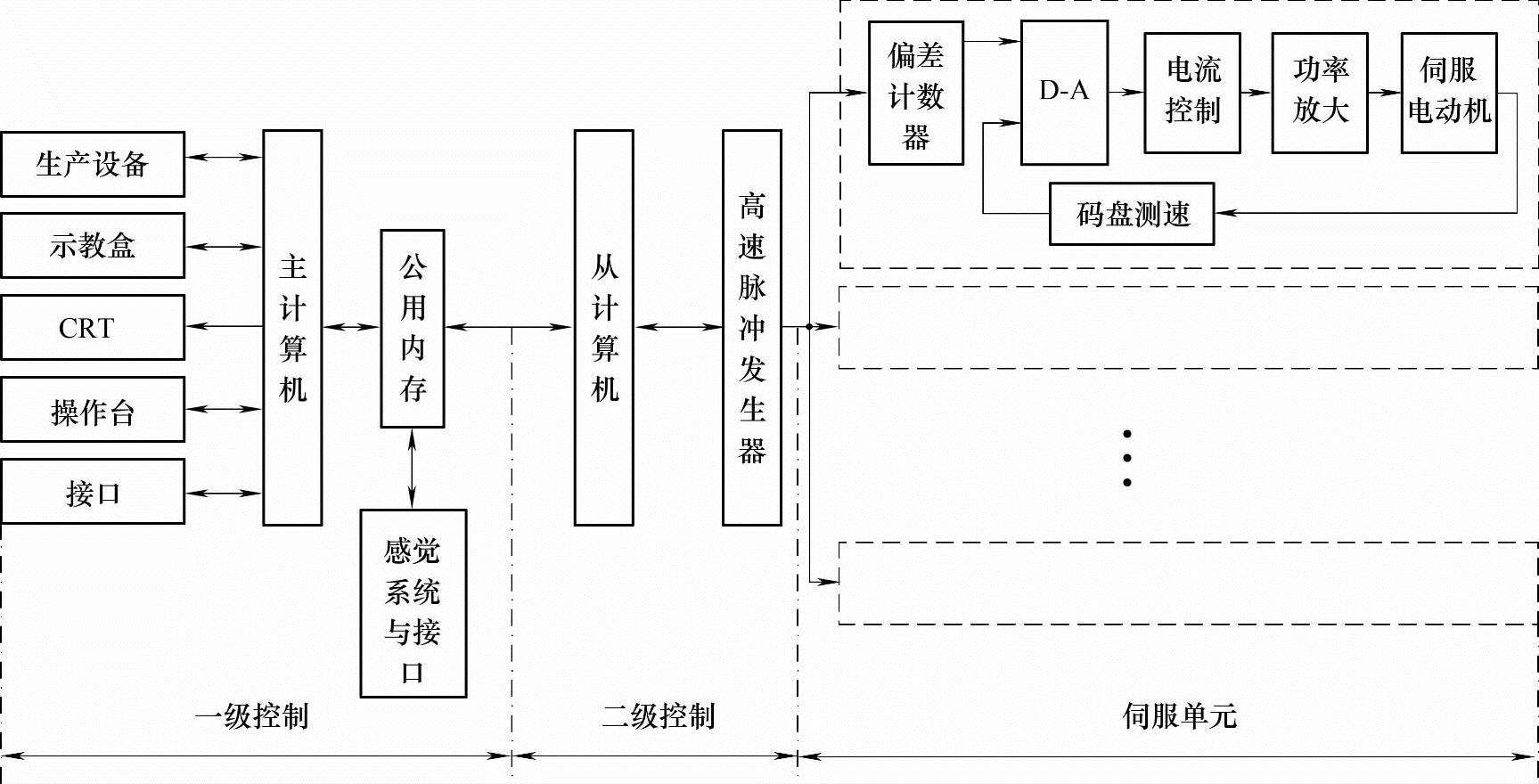
一级CPU为主机,担当系统管理、机器人语言编译和人机接口功能,同时也利用它的运算能力完成坐标变换、轨迹插补,并定时地把运算结果作为关节运动的增量送到公用内存,供二级CPU读取;二级CPU完成全部关节位置数字控制。这类系统的两个CPU总线之间基本没有联系,仅通过公用内存交换数据,是一个松耦合的关系。对采用更多的CPU进一步分散功能是很困难的。日本于20世纪70年代生产的Motoman机器人(5关节,直流电动机驱动)的计算机系统就属于这种主从式控制方式,其构成框图如图2-2所示。主从控制方式系统实时性比较好,适用于高精度、高速度控制,但其系统扩展性较差,维修困难。
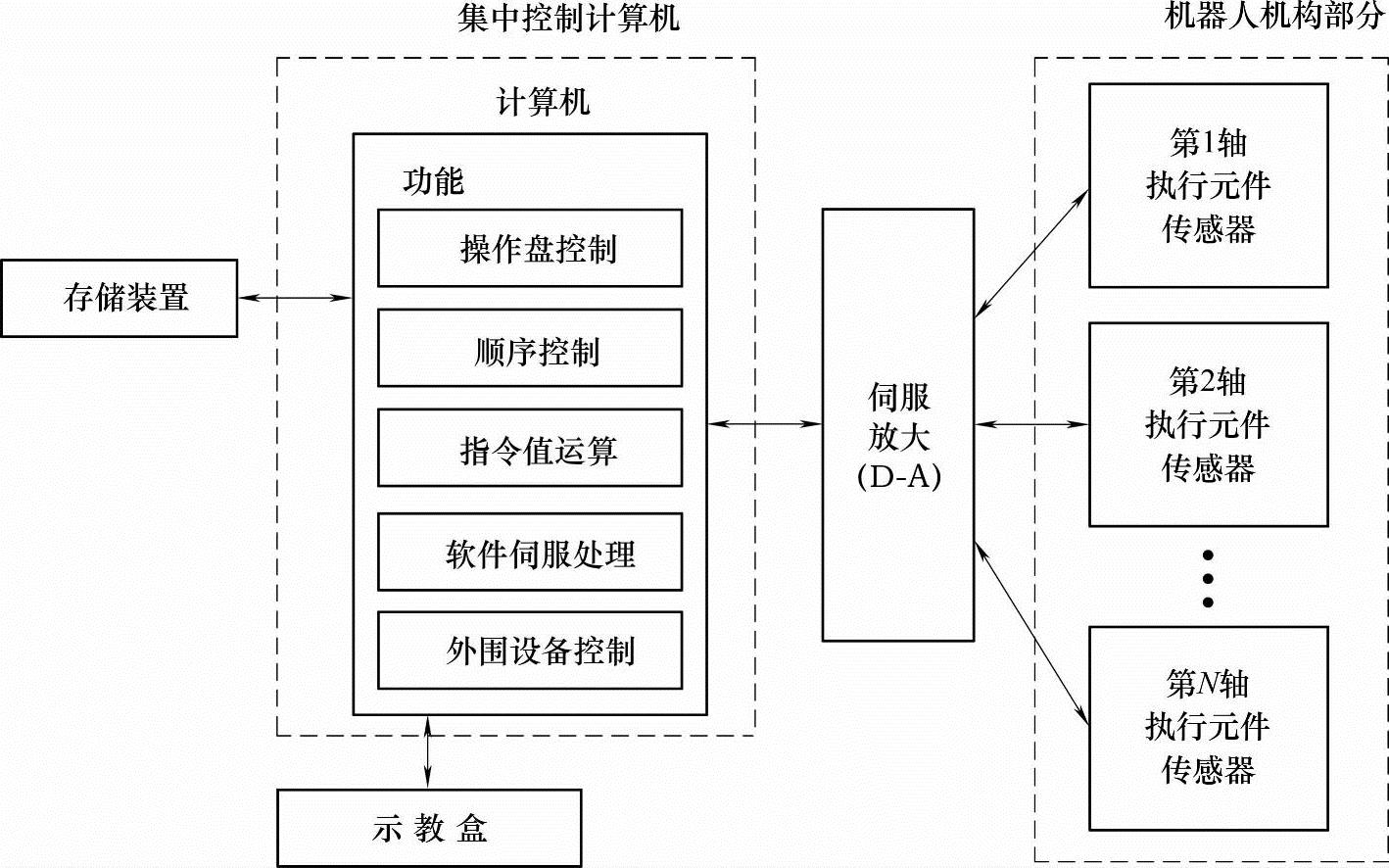
图2-1 集中控制方式结构框图
 (https://www.xing528.com)
(https://www.xing528.com)
图2-2 主从控制方式结构框图
3.多CPU结构、分布式控制方式
目前,普遍采用这种上、下位机两级分布式结构,上位机负责整个系统管理及运动学计算、轨迹规划等。下位机由多CPU组成,每个CPU控制一个关节运动,这些CPU和上位机联系是通过总线形式的紧耦合。这种结构的控制器工作速度和控制性能明显提高。但这些多CPU系统共有的特征都是针对具体问题而采用的功能分布式结构,即每个处理器承担固定任务。各模式之间可以是主从关系,也可以是平等关系。这种方式实时性好,易于实现高速、高精度,易于扩展,可实现智能控制,其结构如图2-3所示。目前世界上大多数商品化机器人控制器都是这种结构。
以上几种类型的控制器都是采用串行机来计算机器人控制算法。它们存在一个共同的弱点:计算负担重、实时性差。所以大多采用离线规划和前馈补偿解耦等方法来减轻实时控制中的计算负担。当机器人在运行中受到干扰时,其性能将受到影响,更难以保证高速运动中所要求的精度指标。
由于机器人控制算法的复杂性以及机器人控制性能的亟待提高,许多学者从建模、算法等多方面进行了减少计算量的努力,但仍难以在串行结构控制器上满足实时计算的要求。因此,必须从控制器本身寻求解决办法。方法之一是选用高档次微机或小型机;另一种方法就是采用多处理器作并行计算,提高控制器的计算能力。
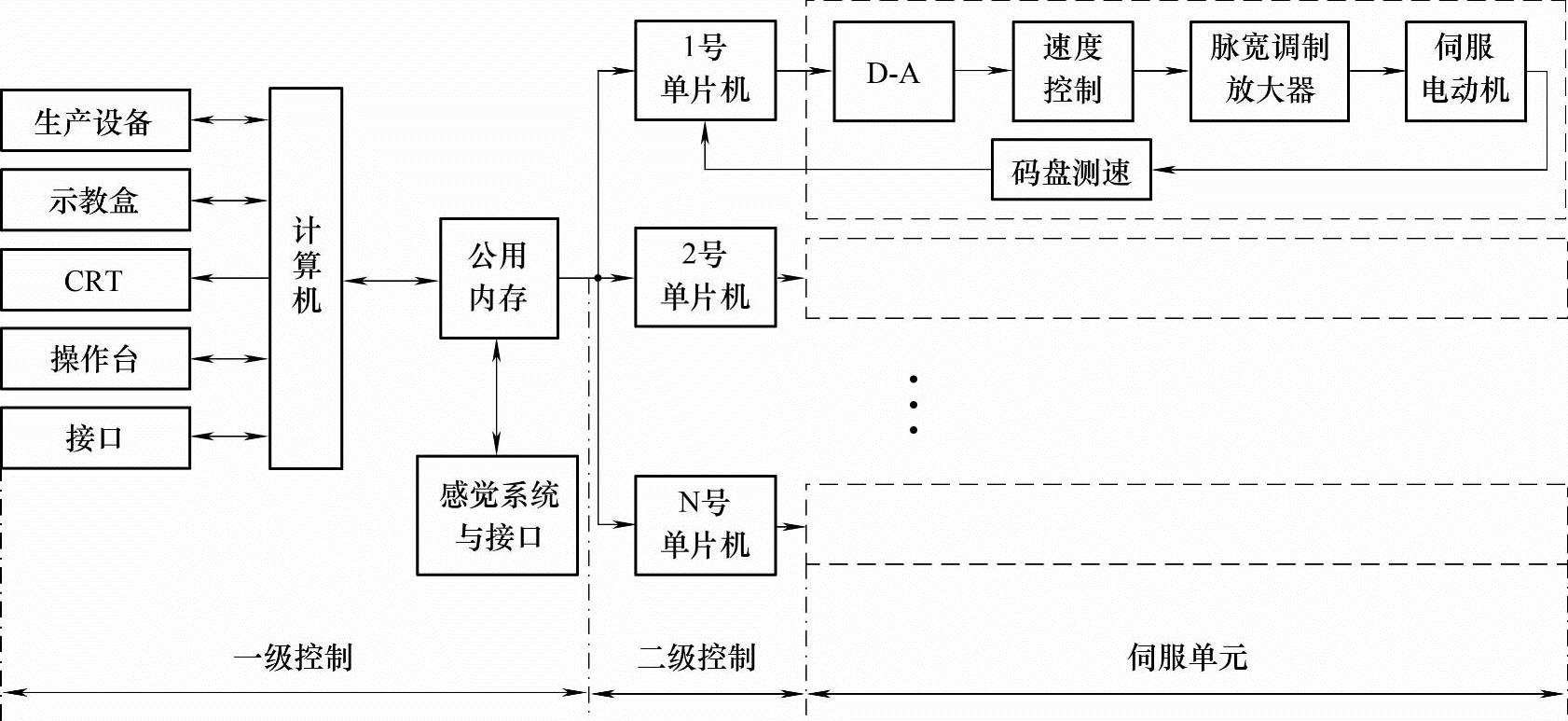
图2-3 分布式控制方式结构框图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。