



【摘要】:自次年起,相扑机器人大会定于每年的12月举行。机器人相扑比赛的规则要求机器人的长和宽不得超过20cm,重量不得超过3kg,对机器人的身高没有要求,如图1-7所示。这种以黑白两色构成边界线的比赛场地便于相扑机器人利用低成本的光电传感器进行边界识别。比如,为了防止被对手推下赛台,有的相扑机器人采用了必要时可将自己的底部吸附在比赛场地的方法,并靠这种策略多次赢得了胜利。
出于对相扑运动的喜爱,日本于1990年3月举行了第一届相扑机器人大会,大会举办得相当成功,同年12月又举行了第二届相扑机器人大会。自次年起,相扑机器人大会定于每年的12月举行。“相扑”是一个体育竞技比赛,目标是通过机器人的短刃接触把一方推出界外,是一项有趣而激动人心的活动,它不仅仅是一个展示机器人技术的好机会,更能体现一个学生应用传感技术对信息的综合处理能力和创新思维。
机器人相扑比赛的规则要求机器人的长和宽不得超过20cm,重量不得超过3kg,对机器人的身高没有要求,如图1-7所示。机器人的比赛场地是高5cm、直径为154cm的圆形台面。台面上敷以黑色的硬质橡胶,硬质橡胶的边缘处涂有5cm宽的白线。这种以黑白两色构成边界线的比赛场地便于相扑机器人利用低成本的光电传感器进行边界识别。相扑机器人使用的传感器有:超声波传感器、触觉传感器等,成本也都不高。正是由于费用不太高,所以发展很快,到1993的第4届比赛,参赛机器人已超过1000台。由于竞技过程是双方机器人“身体”的直接较量,气氛紧张、比赛激烈。

图1-6 舞蹈机器人“梦露”(https://www.xing528.com)
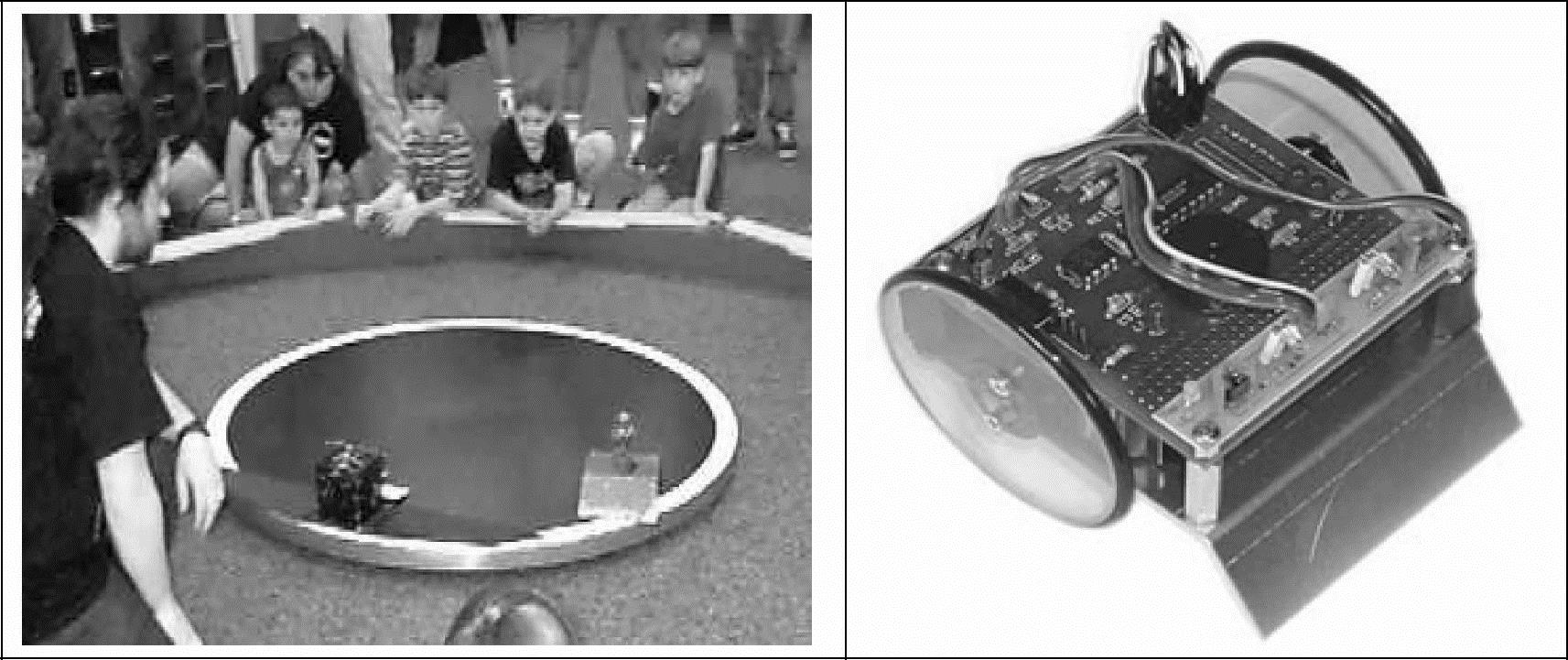
图1-7 相扑机器人
相扑机器人比赛的规则比较宽松,给参赛者留有较大的发挥空间。比如,为了防止被对手推下赛台,有的相扑机器人采用了必要时可将自己的底部吸附在比赛场地的方法,并靠这种策略多次赢得了胜利。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。