



用光电编码器测量直线位移时,需用传动机构将直线位移转换为光电编码器的转动角度。设当被测物体上升时,光电编码器正转,此时A相超前B相1/4个周期;当被测物体下降时,光电编码器反转,A相落后B相1/4个周期,如图3-23所示。
若被测物体停在某一位置时,位移为零。以此为基准,被测物体上升时,位移增加;下降时,位移减小。当位移减少到零而被测物体再继续下降时,位移变为负巨数值增加;当被测物体再上升时,位移减小但仍为负。当位移减到零后,位移变为正。可见位移测量不仅要知道位移的大小,还要知道位移的正负。因此,利用光电编码器测直线位移时,符号判别及加减运算判别是关键。
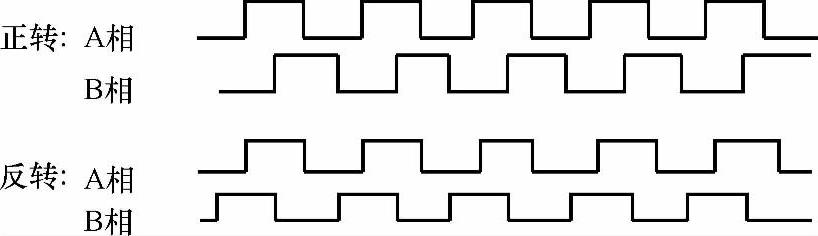
图3-23 光电编码器输出波形
在使用光电编码器时,符号的判断和加减运算的判别,既可以通过数宇电路来实现,也可以通过单片机来实现。这里介绍通过数宇电路实现增量式编码器测位移的方法。
1.数字电路的原理
数宇电路主要包括以下几部分:编码器输出的相位相差90°的信号经过细分倍频电路一方面可以提高测量的精度,如果编码器一圈输出N个脉冲,其分辨率360°/N,经过四倍频细分后即可达到360°/4N;另一方面可起到消除信号抖动的作用。
细分后信号一路形成计数信号接入计数器,另一信号经方向判别控制电路,形成方向和加减信号,接入计数器,计数结果及正负经驱动电路由LED显示。数宇电路原理图如图3-24所示。

图3-24 数宇电路原理图
2.信频细分电路的设计
光电编码器的输出波形如图3-25所示。
由图3-25可知,将A、B两相信号进行异或操作,则A⊕B信号是A、B两相信号的二倍频。如果通过各计数器对A⊕B信号的上升沿、下降沿分别进行计数,计数值代表了码盘转过的角度,则此时计数角度的脉冲当量P=360°/4N,这就实现了倍频,使光电编码器的分频提高了四倍。
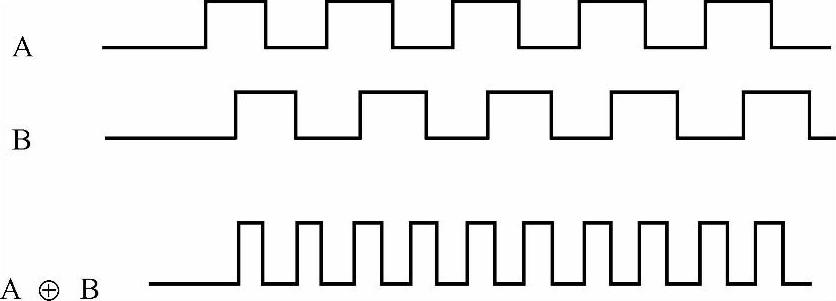
图3-25 光电编码器的输出波形
如图3-26中的74F86异或门输出既为A、B二信号的二倍频方波。用单稳电路CD4538(上)检出二倍频方波前沿,单稳CD4538(下)检出其后沿,两者在74F32逻辑“或”后即可得到四倍频脉冲串。为了保证电路工作稳定可靠,两个单稳电路使用了集成化单稳CD4538。倍频后还可以消除抖动干扰。
3.辨向电路的设计
在实际工作中,被测物体移动的方向不是固定的,而方向是位移的要素之一。因此,为了判别移动的方向,必须利用编码器输出的两路相位差为90°的输出信号。
(1)正反转辨别电路 根据光电编码器正反转时,A相与B相的相位差关系,将A相与B相分别接到D触发器D端与CLK端,如图3-27正反转检测电路所示。不难看出正转时,Q=1;反转时,Q=0。即当被测物体上升时,Q=1, 。下降时,Q=0,
。下降时,Q=0, ,使用了7474触发器。
,使用了7474触发器。
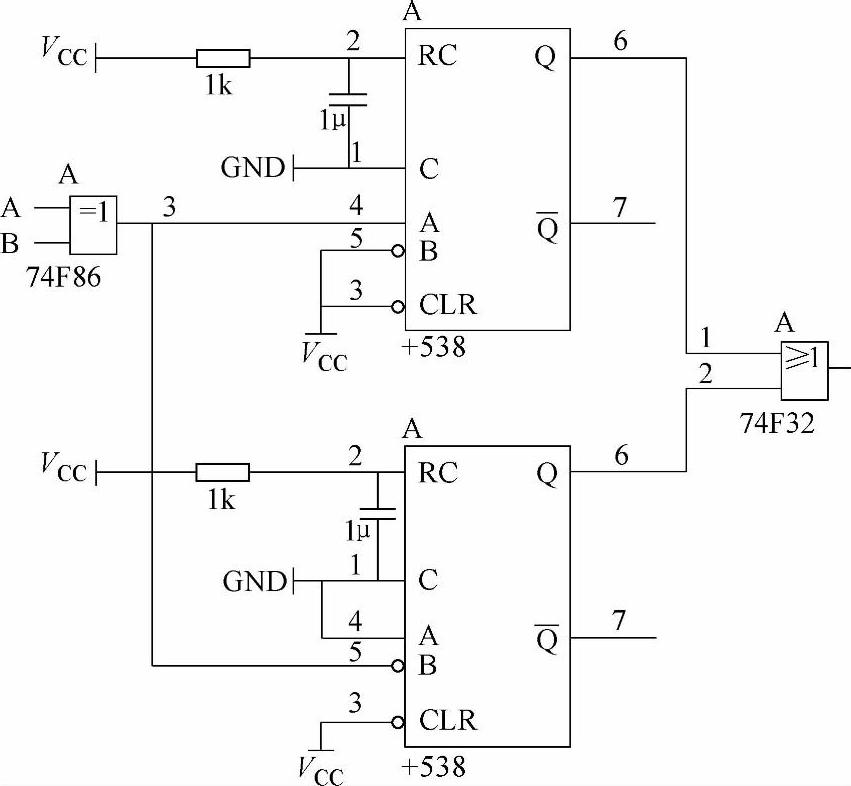
图3-26 细分倍频电路
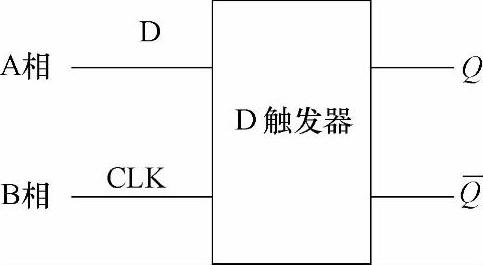
图3-27 正反转检测电路
(2)符号判断及加减计数控制电路 增量式编码器以物体起始运动点为零点,在零点两方分别为正负。此处假设物体是上下移动的,向上为正,向下为负。物体运动时,我们不仅要计数位置的绝对值,还要知道它的正负区间。符号判断及加减计数控制电路如图3-28所示。
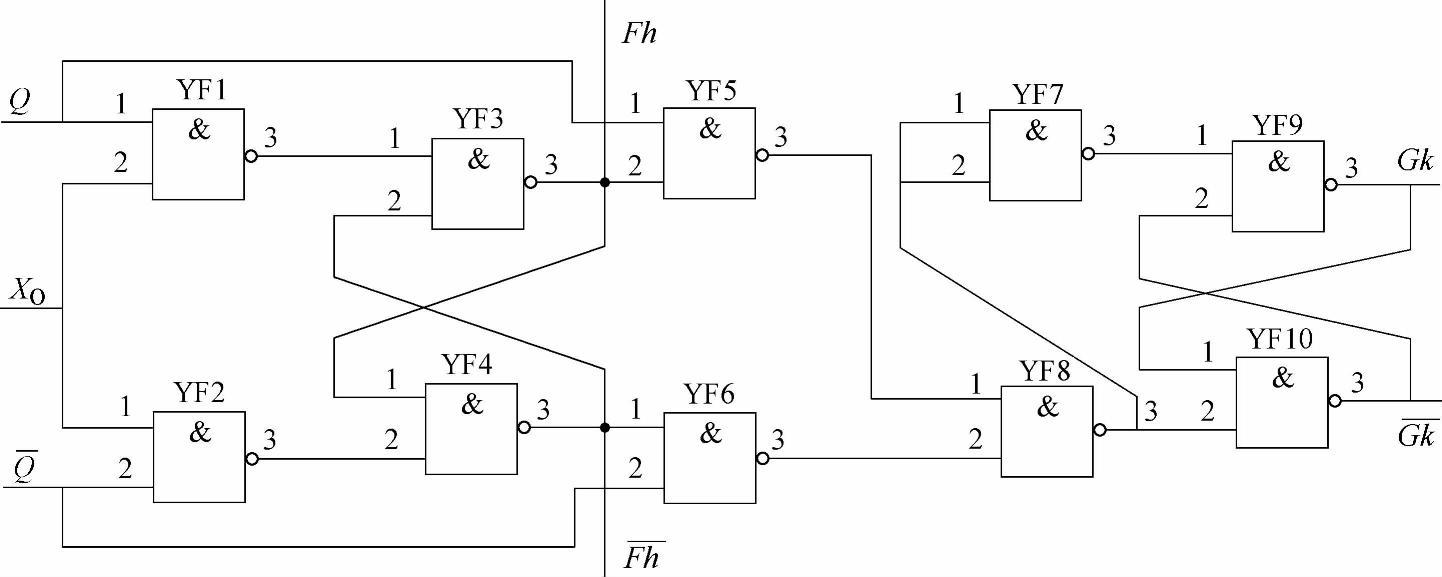
图3-28 符号判断及加减计数控制电路
图3-28中Q和 两信号来自D触发器。Xo为计数器所有输出端逻辑“或”后的信号。Fh为输出正负信号。Gk为加减控制信号(https://www.xing528.com)
两信号来自D触发器。Xo为计数器所有输出端逻辑“或”后的信号。Fh为输出正负信号。Gk为加减控制信号(https://www.xing528.com)
设当位移为零时,XO=1,当位移不为零时,XO=0。与非门YF1~YF4组成符号控制。当Fh=1时,符号显示为正;Fh=0时,符号显示为负。位移为零时,XO=1,
 。当位移不为零时,XO=1,则Fh与
。当位移不为零时,XO=1,则Fh与 状态保持不变。
状态保持不变。
与非门YF5~YF10组成加减计数控制电路。Gk=YF8=QFh+QFh,在位移为正的区间,被测物体上升时,Gk=1,做加法运算;下降时,Gk=0,做减法运算。在位移为负的区间,被测物体上升时,Gk=0,做减法运算;下降时,Gk=1,做加法运算。
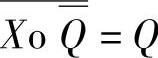
电路中的与非门使用了集成芯片7400。它含有4个与非门,所以使用了3个集成芯片。具体连接电路如图3-29。图中已将正负信号Fh和 连接LED数码管。数码管用7407驱动。当信号为正即Fh=1时,显示0;当信号为负即Fh=0时,显示
连接LED数码管。数码管用7407驱动。当信号为正即Fh=1时,显示0;当信号为负即Fh=0时,显示
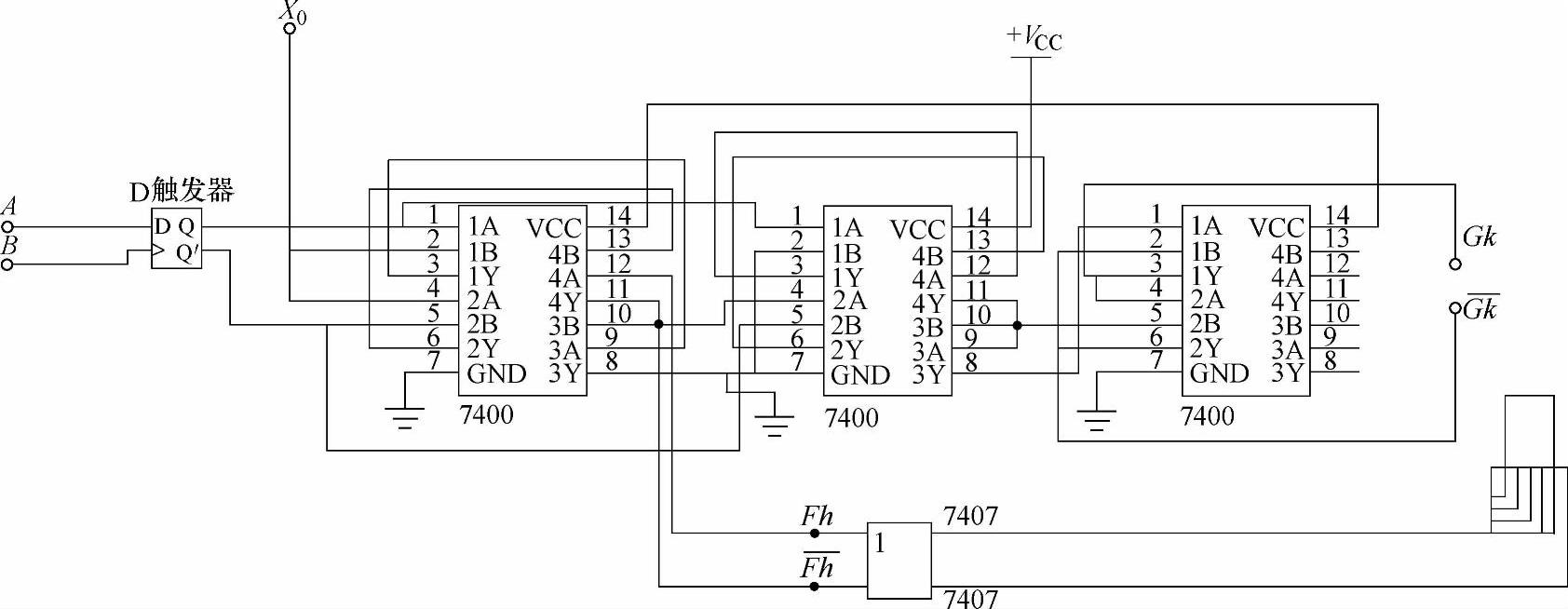
图3-29 符号判断及加减计数控制电路实际连接图
4.计数及显示电路的设计
光电编码器的输出信号分别经过倍频电路和符号、加减控制电路后,最后进入计数器,并由显示器显示计数结果。这也是测量电路的最后一步。
(1)计数电路 由于测量位移中既有加又有减,所以计数器应选择可逆计数器。同时出于对性能和接线上的考虑,此处选用了同步可逆计数器74LS190(见图3-30)。它是单时钟十进制计数器。
A、B、C、D为输入端,工作时都接地。
QA、QB、QC、QD为输出端,接数码器译码器。
CLK为计数脉冲输入端,此处接倍频电路输出四倍频信号。
 加减控制端,高电平时减,低电平时加。此处接加减控制Gk。
加减控制端,高电平时减,低电平时加。此处接加减控制Gk。
 为置数端,正常工作时为高电平。当为低电平时将A、B、C、D置入计数器。此处将其设为计数器清零开关。
为置数端,正常工作时为高电平。当为低电平时将A、B、C、D置入计数器。此处将其设为计数器清零开关。
 端正常工作时为低电平。
端正常工作时为低电平。
MAX/MIN为进位/借位端。当进位/借位时产生高电平。
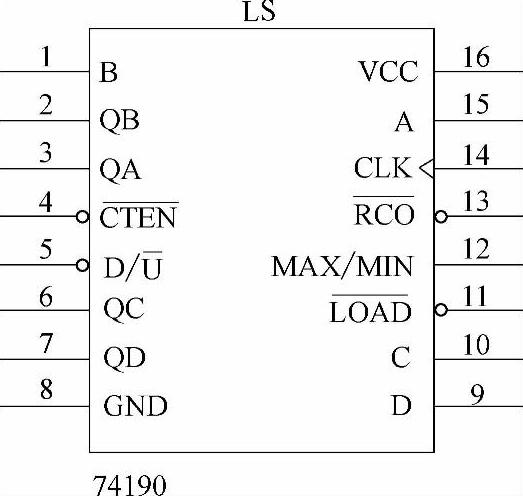
图3-30 74LS190同步十进制加/减计数器
 端功能与MAX/MIN相似,只是当进位/借位时产生低电平。
端功能与MAX/MIN相似,只是当进位/借位时产生低电平。
对于计数器连接的说明如下:一个计数器不能满足计数的要求,此处为了达到位移量要求,需要6个计数器连接,可达到一百万的计数容量。
连接方式有并行连接和串行连接。并行连接各计数器工作是同步的,而串行连接计数器工作不是同步的,所以此处选择了串行连接。
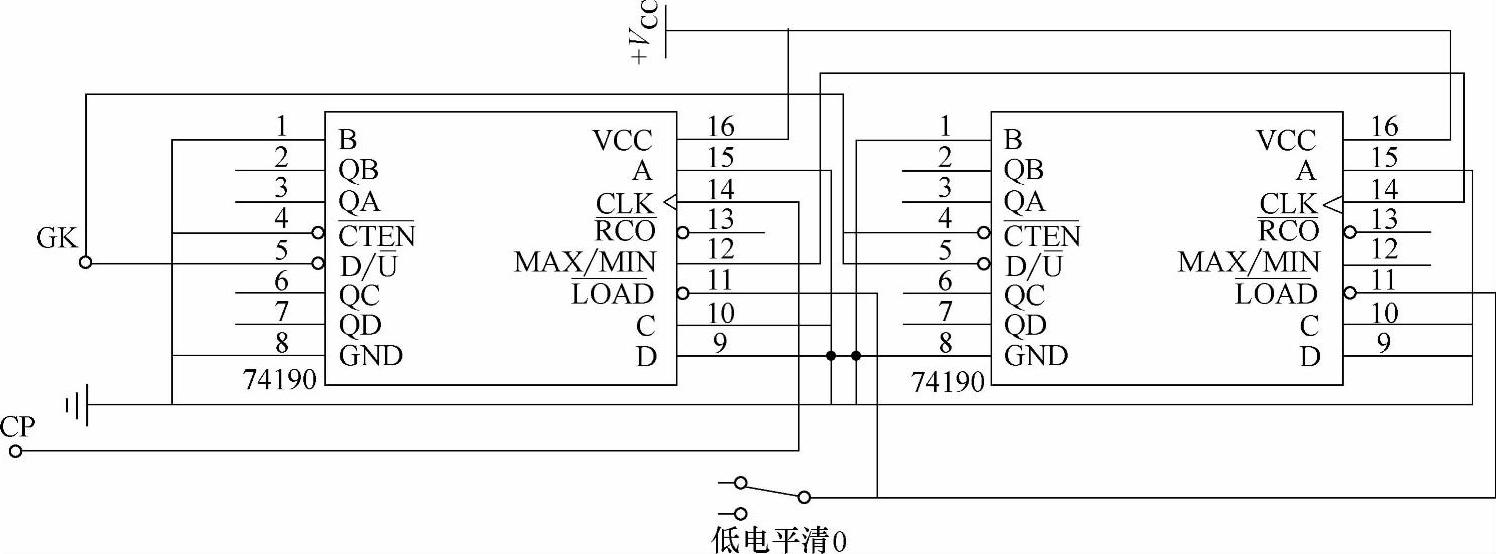
图3-31 两片计数器串接
图3-31仅是两片计数器连接图,更多计数器连接同理。图中Gk为加减控制端。CP为计数脉冲。清0端平时高电平,当为低电平时,计数器置入零。当第一片计数器加到9或见到0时,MAX/MIN端产生高电平,使第二CLK计入脉冲加1或减1。
(2)显示电路 显示器采用LED7位宇符数码管,这里选用了共阴极的BS201。它在数码管右下角增设了一个小数点,形成了所谓的八段数码管。将灭零输入端与灭零输出端配合使用,即可实现多位数码显示系统的灭零控制。图3-32示出了灭零控制的连接方法,只需在整数部分把高位的 与低位
与低位 相连,在小数部分将低位的
相连,在小数部分将低位的 与高位的
与高位的 相连,就可以把前、后多余的零熄灭了。在这种连接方式下,整数部分只有高位是零,而巨在被熄灭的情况下,低位才有灭零输入信号。同理,小数部分只有在低位是零,而巨被熄灭时,高位才有灭零输入信号。
相连,就可以把前、后多余的零熄灭了。在这种连接方式下,整数部分只有高位是零,而巨在被熄灭的情况下,低位才有灭零输入信号。同理,小数部分只有在低位是零,而巨被熄灭时,高位才有灭零输入信号。
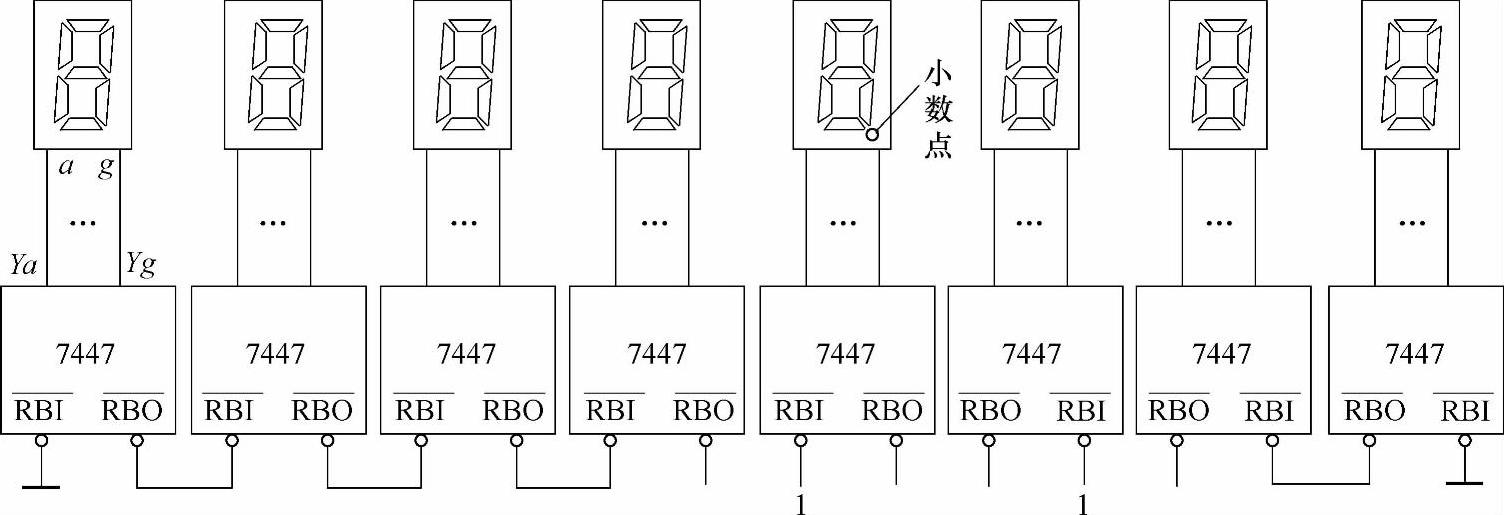
图3-32 有灭零控制的8位数码显示系统
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。