



1.平面正交光栅法(Cross Grid Encoder Test,CGET)的工作原理
如图4-22所示,工作台上置有直径140mm刻有高精度正交栅纹的平面光栅,主轴端布置有读数光栅,两者的间隙约为0.5mm。在平面光栅的有效工作范围内,不论按NC指令执行的工作台与主轴所作的相对运动是规则的圆运动、直线运动,或者是不规则的复杂曲线运动,都可通过安装在主轴端上的读数头及后续电路直接“读出”其运动轨迹是否精良的信号,经细分后的读数分辨率可读至5 nm。W.Knapp在德国Heidenhain公司生产的平面正交光栅基础上设计了KGM+系统,在原读数光栅上又增设了一个对读数光栅和平面光栅之间的距离敏感的光学传感器,用于测量两者之间的距离。当平面光栅在XY平面上作圆周运动时,该读数光栅除了可以测量数控机床在X轴和Y轴上的位移,还可以感知它在Z轴上位移变化量。另外,他们还研究了在不同进给速度和完成不同形状的轨迹时的运动精度。
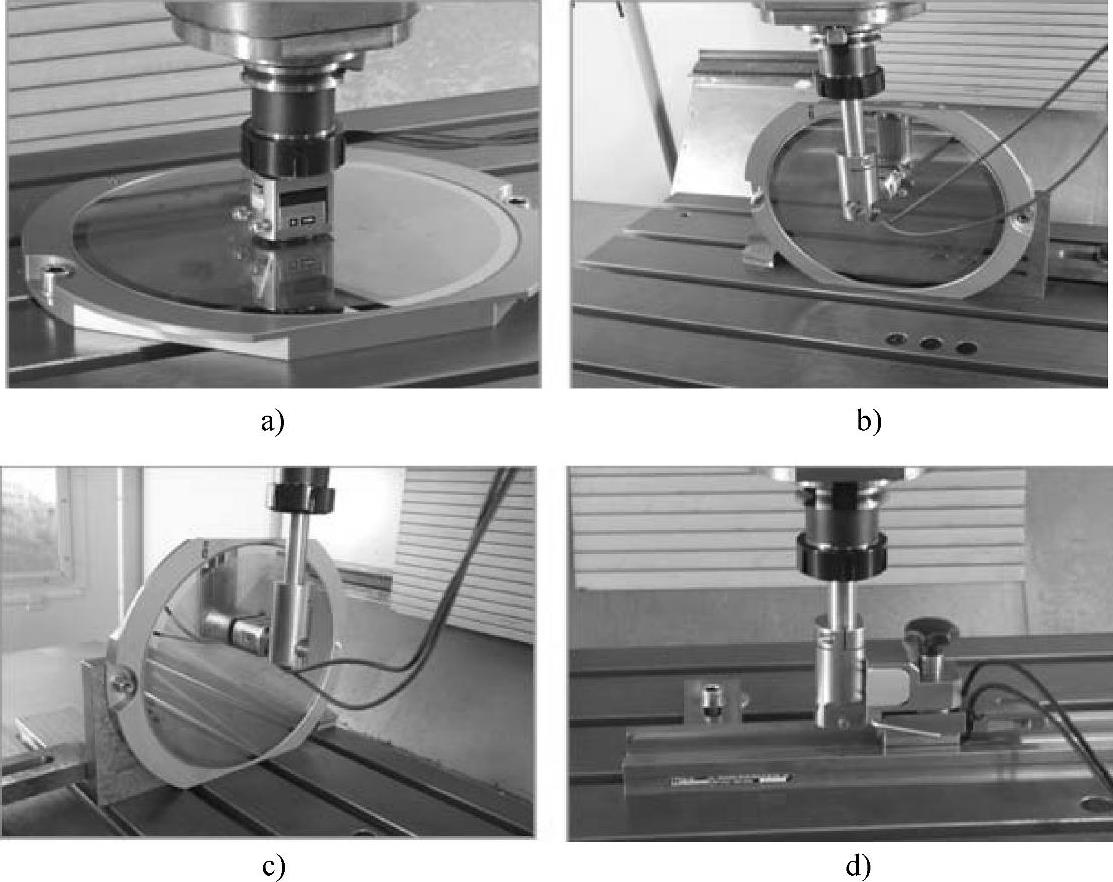
图4-22 平面正交光栅
a)检测数控机床XOY平面圆运动轨迹 b)检测数控机床XOZ平面圆运动轨迹 c)检测数控机床在YOZ平面圆运动轨迹 d)检测数控机床在XOY平面直线运动轨迹
此法有如下不可替代的优点:分辨率很高;非接触测量使得测试灵活,可方便地用于空间任一平面内的运动,对相对运动速度的约束更少,同时还可以测量数控机床完成复杂轨迹时的运动精度,而不再局限在圆周运动;既有激光干涉测量仪的功能,又有双球规的作用,通过测直线获移动误差,通过测圆周获转角误差。除了仪器价格较高这一点之外,它是当今现场运动精度诊断的首选方法。
2.机床几何误差的辨识
(1)定位误差、直线度误差和垂直度误差的辨识 检测坐标平面内的特定直线(折线)运动轨迹精度,可以得到与该坐标平面相关的轴的位置误差、直线度误差及垂直度误差。图4-23所示为数控机床在XOY平面内做直线运动时定位误差、直线度误差和垂直度误差的辨识图。机床分别沿着y=Y0和x=X0做直线运动(或沿经过y=Y0和x=X0的垂直折线运动)时,实际测得的原始信号分别为S0(x)和S0(y)。由于垂直度误差的影响,使得两组测量数据中分别包含趋势线Trend(x)=a1x+b1和Trend(y)=a2y+b2,如图4-23a所示。趋势线的斜率和截面距两参a1、b1和a2、b2可通过最小二乘拟和求出:

式中X——由S0(x)组成的列矢量;
Y——由S0(y)组成的列矢量;

N为采样点的个数。
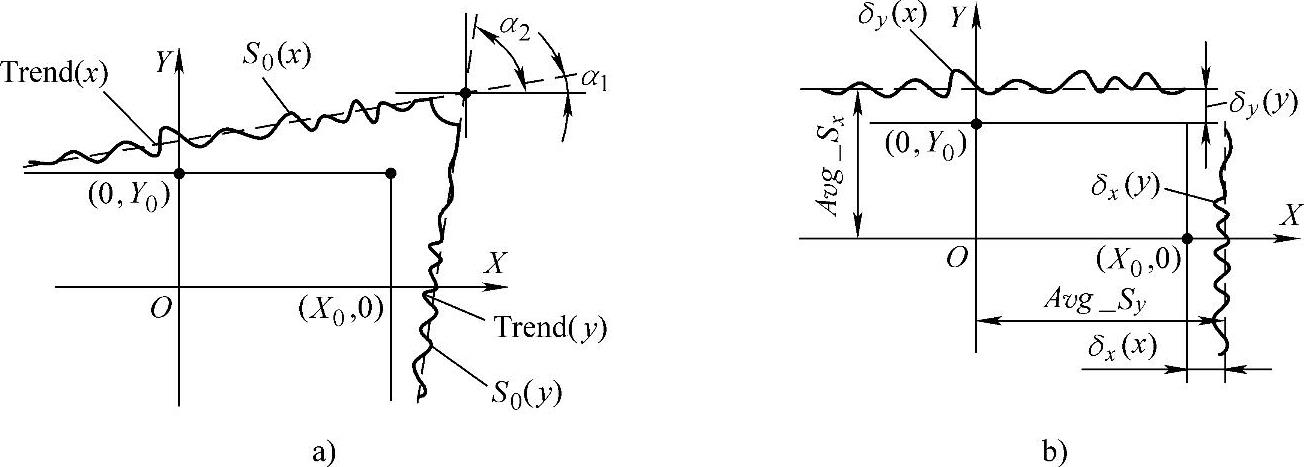
图4-23 数控机床在XOY平面的直线运动
由图4-23a可得,X导轨和Y导轨之间的垂直度误差为Sxy=π/2-a2+a1;去除S(x)和S(y)中垂直度误差所引起的误差信号,如图4-21b所示,可得X轴在Y方向上的直线度误差δy(x)以及Y轴在X方向上的直线度误差δx(y)分别为
δy(x)=S1(x)=S0(x)-a1x
δx(y)=S1(y)=S0(y)-a2y
令S1(x)和S1(y)的平均值分别为AvgSx和AvgSy。因此,Y轴和X轴的位置误差为

类似,可以通过在XOZ平面和YOZ平面内测量数控机床做直线运动轨迹时的运动精度,就可以来辨识出其他几项位置误差、直线度误差和垂直度误差。
(2)转角误差辨识方法在所有位置误差、直线度误差、垂直度误差均已得到的基础上,通过检测坐标平面内的特定圆运动轨迹,可以辨识出部分角偏误差。现以YOZ平面为例,分别讨论机床在x=0和x=c(常量)两平面内做圆运动的辨识情况。
1)机床在x=0的YOZ平面以(x,y,z)=(0,0,0)为圆心作半径为R的圆运动,此时εx(x)=0、εy(x)=0、εz(x)=0、δy(x)=0、δz(x)=0,代入误差模型中,则有(https://www.xing528.com)
ΔWy=Lεx(z)-OBCzεx(y)+z[εx(y)-φyz]+δy(y)+δy(z)
ΔWz=yεx(y)-δz(y)+δz(z)
从而可得ΔR(θ)=ΔWycosθ+ΔWzsinθ
改写成矩阵形式,即EYOZ=QYOZ×PYOZ
式中PYOZ=[axz1,axz2,axz3,axy1,axy2,axy3]
QYOZ=[Lzcosθ,Lz2cosθ,Lz3cosθ,-OBCzycosθ+zycosθ+y2sinθ,OBCzy2cosθ+zy2cosθ+y3sinθ,-OBCzy3cosθ+zy3cosθ+y4sinθ]
EYOZ=[ΔR(θ)+(zφyz-δy(y)-δy(z))cosθ+(δz(y)-δz(z))sinθ
由最小二乘法拟合知:PYOZ=(QYOZT×QYOZ)-1×QYOZT×EYOZ。故代入检测数据,可得到εx(y)和εx(z)的各阶系数。
2)机床在x=c(常量)的YOZ平面以(x,y,z)=(c,0,0)为圆心做半径为R的圆运动,此时误差模型为
ΔWy=Lεx(z)-OBCz·εx(y)+c[εz(c)-εz(z)-φxy]+z[εx(c)+εx(y)-φyz]-δy(c)+δy(y)+δy(z)
ΔWz=-xεy(c)+y[εx(c)+εx(y)]-δz(c)-δz(y)+δz(z)
分析知,运用最小二乘法解算该模型时,只要已知εy(x)和εz(x),便可解算出εx(z)、εz(z)、εx(x)和εx(y)。现在假设εy(x)、εz(x)、εx(y)已知,则将上式代入ΔR(θ)=ΔWycosθ+ΔWzsinθ,并改写成矩阵形式:
EYOZ=QYOZ×PYOZ
式中PYOZ=[axz1,axz2,axz3,azz1,azz2,azz3,axx1,axx2,axx3]
QYOZ=[Lzcosθ,Lz2cosθ,Lz3cosθ,-xzcosθ,-xz2cosθ,-xz3cosθ,zxcosθ+yxsinθ,zx2cosθ+yx2sinθ,zx3cosθ+yx3sinθ]
EYOZ=ΔR(θ)+xεy(x)sinθ+OBCzεx(y)cosθ-zεx(y)cosθ-xεz(x)cosθ-yεx(y)sinθ
代入检测数据,由最小二乘法可拟合得到εx(z)、εz(z)和εx(x)的各阶系数。
类似,可以通过在XOY平面和XOZ平面内检测数控机床做圆运动轨迹时的运动精度,就可以辨识出其他几项角偏误差。若依一定次序分别检测不同坐标平面内的圆运动轨迹,则可以分步辨识出三轴机床的全部九项角偏误差。
(3)测量流程 图4-24所示为Heidenhain KGM 182平面光栅检测流程。
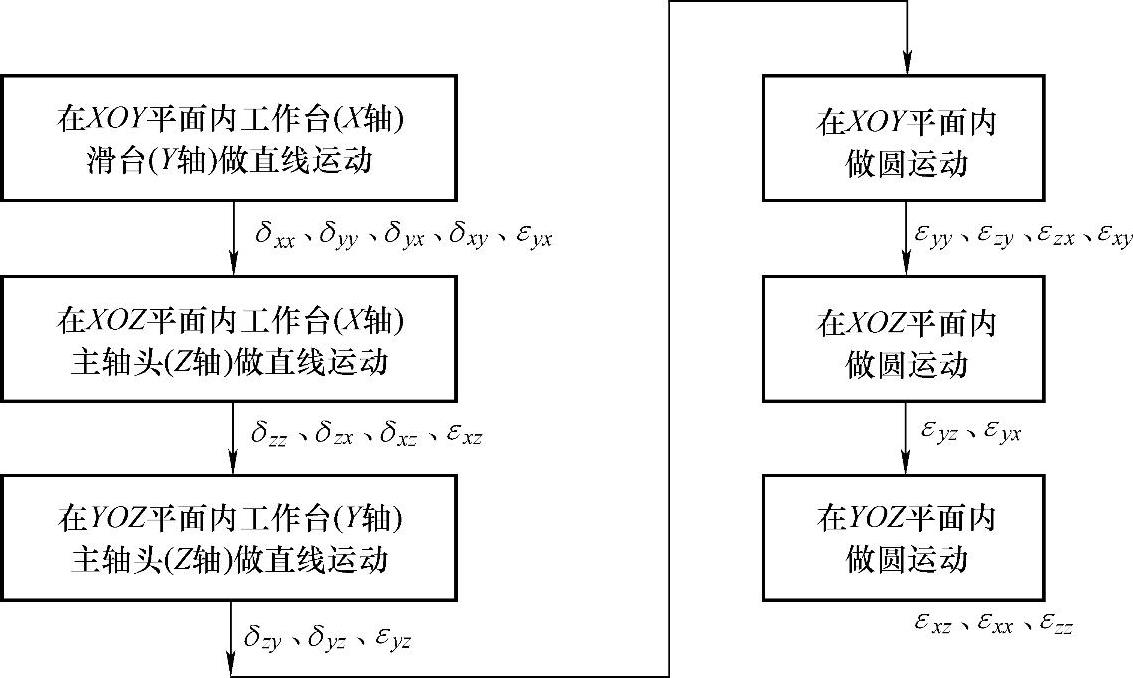
图4-24 Heidenhain KGM 182平面光栅检测流程
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。