



如图3-2所示,设P点在原坐标系O1(X1,Y1,Z1)中的坐标值为(x1,y1,z1),当坐标系O1(X1,Y1,Z1)沿轴X1平移x至新坐标系O2(X2,Y2,Z2)后,则P点在新坐标系O2(X2,Y2,Z2)中的坐标值(x2,y2,z2)与(x1,y1,z1)的关系可表示为
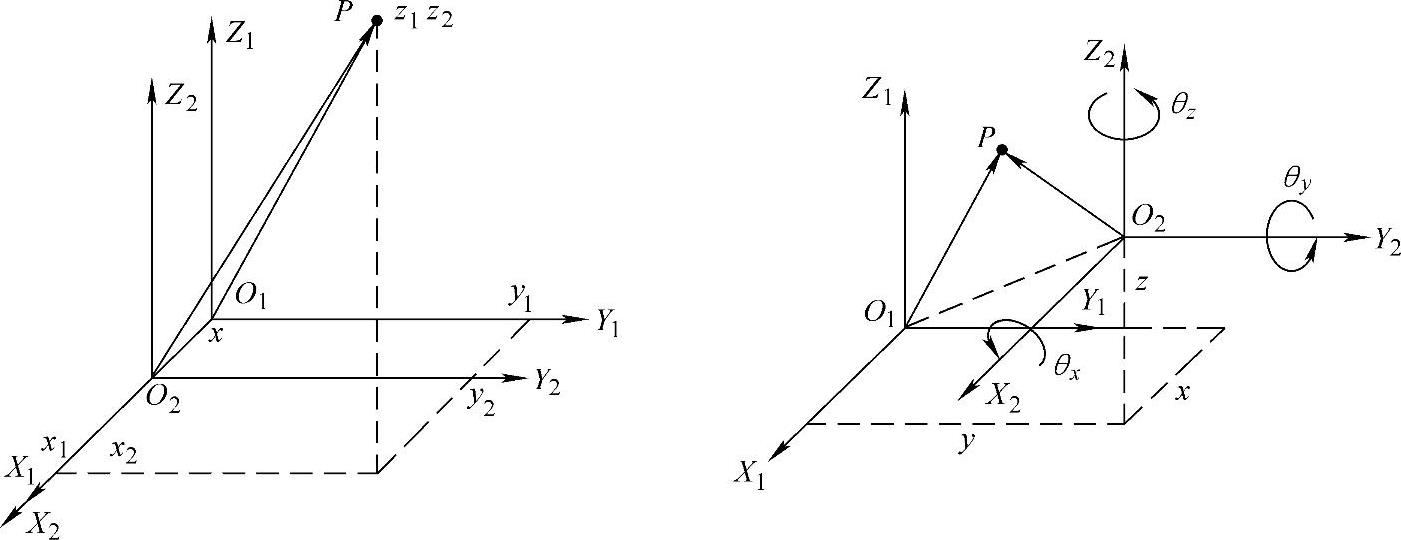
图3-2 坐标系的坐标变换
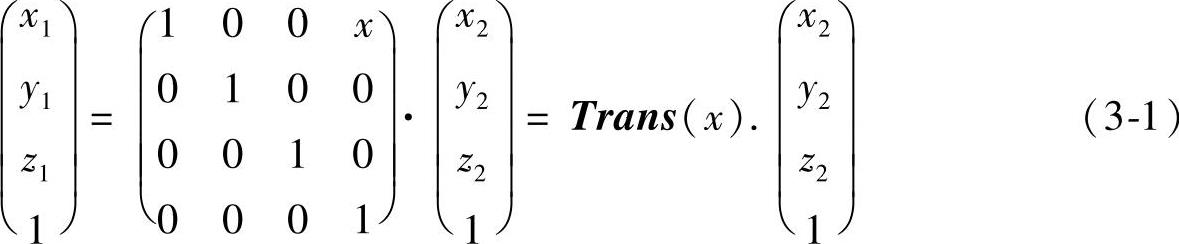
式中Trans(x)——表征沿X1轴平移的平移矩阵。
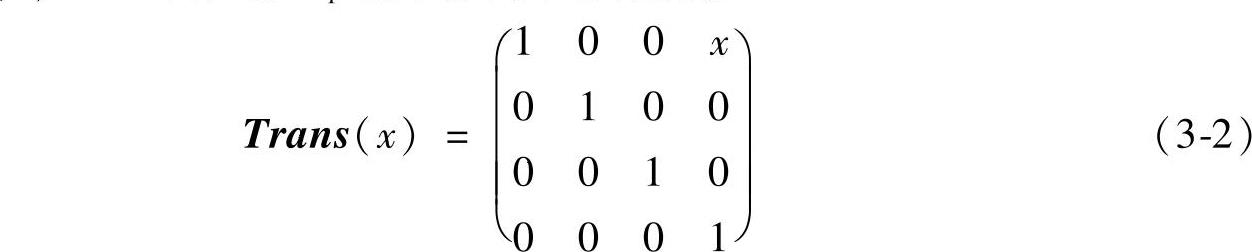
类似地,沿Y1轴和Z1轴的平移矩阵分别为

若O1坐标系(X1,Y1,Z1)绕X1轴旋转θx后成为O2坐标系(X2,Y2,Z2),则

式中Rot(θx)——绕X1轴的旋转矩阵:
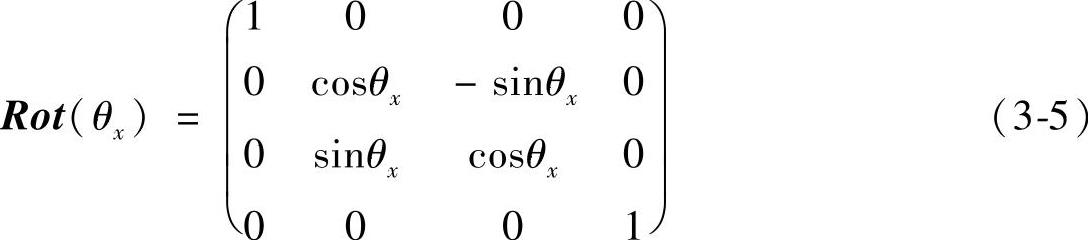
类似地,绕Y1轴和Z1轴的旋转矩阵可分别表示为

在坐标系的坐标变换中,若坐标系O1(X1,Y1,Z1)先分别沿X1、Y1和Z1轴平移x、y和z,再分别绕X1、Y1和Z1轴旋转θx、θy和θz,则表征O1(X1,Y1,Z1)经上述平移、旋转后转换到新坐标系O2(X2,Y2,Z2)之间关系的齐次坐标变换矩阵为
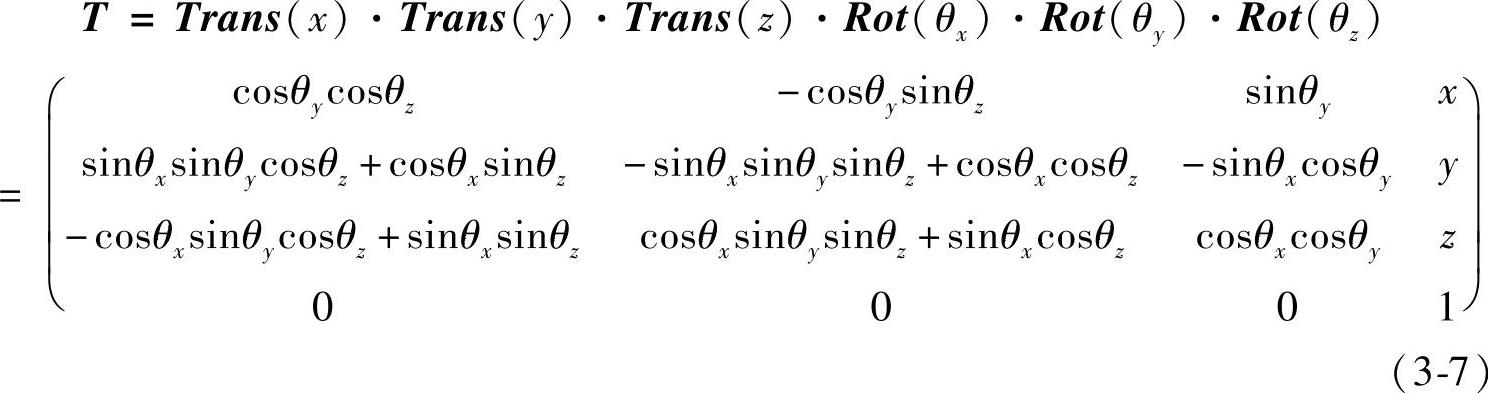
变换矩阵YZTi分别为
 (https://www.xing528.com)
(https://www.xing528.com)
式中 右上标i——理想(Ideal)状态;
左侧上、下标——从上标坐标系到下标坐标系的变换(后同);T——坐标变换矩阵。
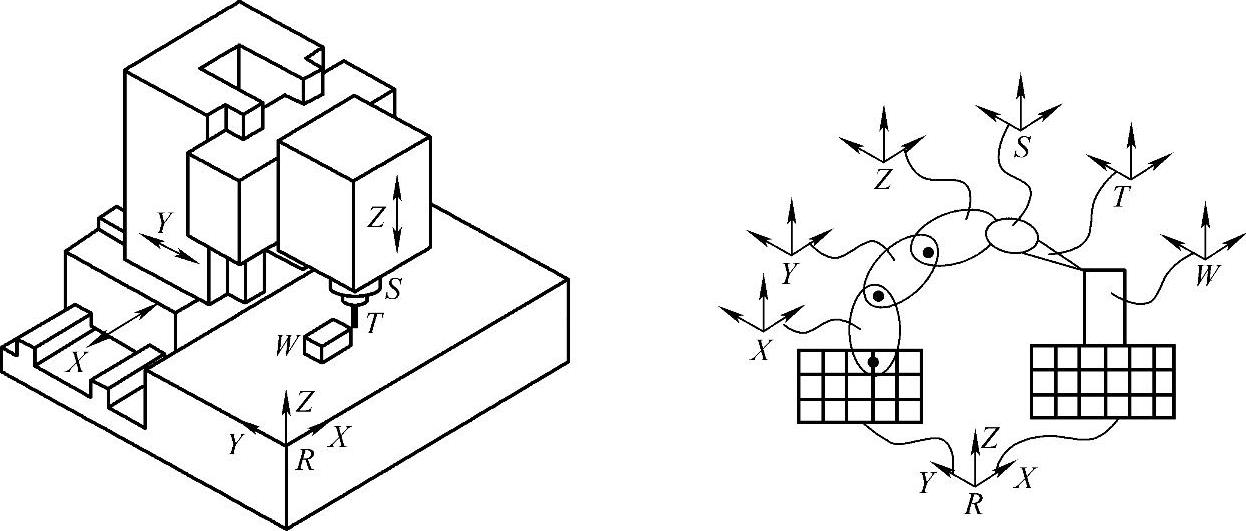
图3-3 TXYZ型加工中心的坐标系设定
理想状态下主轴和Z轴无相对运动,因此坐标系Z到主轴坐标系S的齐次变换矩阵为单位矩阵,即ZSTi=I;刀具与主轴固连,因此主轴坐标系S到刀具坐标系T的齐次变换矩阵为单位矩阵,即STTi=I;工件与床身之间无相对运动,因此工件坐标系W到参考坐标系R的齐次变换矩阵为单位矩阵,即WRTi=I。
在理想情况下,当机床分别沿X、Y、Z方向移动x、y、z距离时,工件坐标系W到刀具坐标系T的齐次变换矩阵为

可知在理想状态下,刀具坐标系在工件坐标系中的坐标为(x,y,z)。
(2)实际状态(有误差)下各运动轴的转换矩阵 在实际情况下,工作台X轴存在三个移动误差δxx、δyx、δzx,三个转角误差εxx、εyx、εzx,当工作台X移动距离x时,基于小误差假设,根据齐次坐标变换原理,参考坐标系R到工作台X的齐次变换矩阵为
式中Δx、Δy、Δz——刀具实际切削点相对理想切削点的位置误差;
Δεx、Δεy、Δεz——刀具实际切削点相对理想切削点的方向误差。
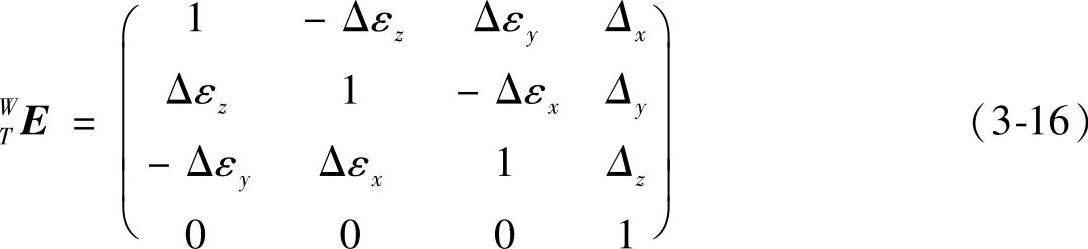
将式(3-10)、(3-14)、(3-16)代入式(3-15),基于小误差假设并忽略二阶及二阶以上小量,可得TXYZ型数控机床工件坐标系W到刀具坐标系T的误差运动变换矩阵 :
:

从而可得TXYZ型加工中心综合误差模型:

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。