



1.伺服系统跟随误差
数控机床的伺服进给系统在恒速输入时,稳态情况下系统的运动速度与指令速度值相同,但两者的瞬时位置却有一恒定的滞后。如图2-29所示,伺服系统在t1时刻进入稳态,实际位置与指令位置滞后一个δ值,该滞后值称为跟随误差。跟随误差与系统增益有关,系统增益越大跟随误差越小,但系统增益过大会造成系统稳定性能变差。
数控机床的跟随误差会引起轮廓误差,其关系如图2-30所示。由于跟随误差的存在,加工后工件的实际轮廓与理想轮廓偏离δ,造成轮廓误差。
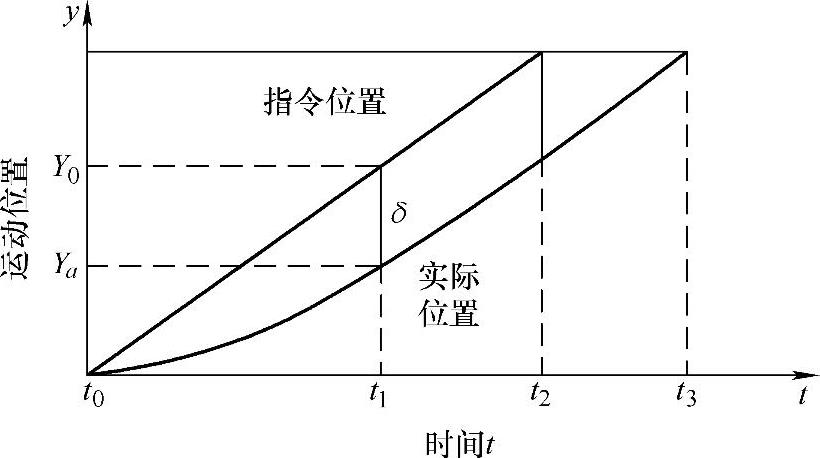
图2-29 伺服系统跟随误差
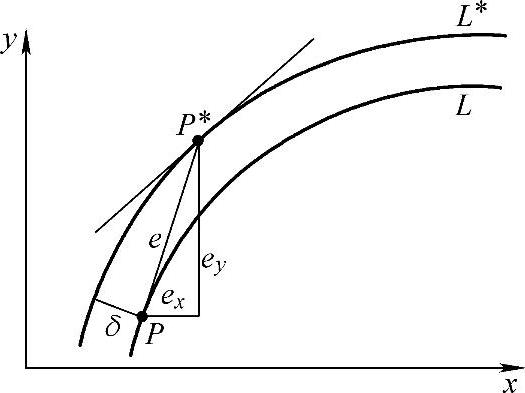
图2-30 跟随误差引起轮廓误差
L*—指令轮廓 L—实际位置 e—跟随误差 δ—轮廓误差
2.步距误差
步距误差通常是指步进电动机运行时,转子实际转过的角度与理论步距角的差值。由于步进电动机转子转过一圈时,将重复上一圈的稳定位置,即步进电动机的步距角累积误差(转子连续走若干步时,步距角的总误差)将以一圈为周期重复出现,转一周的累积误差为零。通常步进电动机的静态步距误差在10′以内。
3.插补算法误差(https://www.xing528.com)
机床数控系统依照一定方法确定刀具运动轨迹的过程称为插补。也可以说,已知曲线上的某些数据,按照某种算法计算已知点之间的中间点的方法,也称为“数据点的密化”。数控装置根据输入的零件程序的信息,将程序段所描述的曲线的起点、终点之间的空间进行数据密化,从而形成要求的轮廓轨迹,这种数据密化机能就称为“插补”。
插补计算就是数控装置根据输入的基本数据,通过计算把工件轮廓的形状描述出来,边计算边根据计算结果向各坐标发出进给脉冲,对应每个脉冲机床在响应的坐标方向上移动一个脉冲当量的距离,从而将工件加工出所需要轮廓的形状。
在数控机床中,刀具不能严格地按照要求加工的曲线运动,只能用折线轨迹逼近所要加工的曲线。这种逼近所形成的误差称为插补算法误差。
4.主轴回转误差
由于制造误差的影响,主轴轴线的运动可分解为纯径向位移(在与主轴轴线垂直的方向)、纯轴向位移(在平行主轴轴线的方向)和角位移(主轴轴线摆动)。这些位移以一定的方式综合起来就构成通常测量的径向振摆(纯径向位移和角位移的综合)与轴向摆动(纯轴向位移与角位移的综合)。
影响主轴回转精度的因素有轴承和主轴其他部件的几何精度及其装配误差,以及主轴转速、负载、工作条件、润滑、主轴部件的结构特性(轴承形式、支撑间的距离)、传动方式、热变形等。
5.编程误差
由于编程时的近似运算误差、分割点坐标计算误差、插值误差、尺寸圆整误差及预求刀具轨迹的误差而引起的误差称为编程误差。编程误差的大小与其应用的具体数控机床的精度有关,亦即编程误差取决于机床的分辨率(脉冲当量)。
6.反向间隙误差
因为丝杠和丝杠螺母之间存在一定的间隙,所以在正转后变换成反转的时候,在一定的角度内,尽管丝杠在转动,但是丝杠螺母还要等间隙消除(受力一侧的)以后才能带动工作台运动,这个间隙就是反向间隙。由反向间隙造成的误差称为反向间隙误差。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。