



1.取指令与输出指令(LD/LDI/OUT/LDP/LDF)
LD/LDI/OUT为逻辑取与输出线圈驱动指令,如表3-3所示。
表3-3 逻辑取与输出线圈驱动指令

(1)指令的含义
1)LD(取指令)。一个常开触点与左母线连接的指令,每一个以常开触点开始的逻辑行都用此指令。
2)LDI(取反指令)。一个常闭触点与左母线连接的指令,每一个以常闭触点开始的逻辑行都用此指令。
3)OUT(输出指令)。对线圈进行驱动的指令,也称为输出指令。
4)LDP(取上升沿指令)。与左母线连接的常开触点的上升沿检测指令,仅在指定位元件的上升沿(由OFF→ON)时接通一个扫描周期。
5)LDF(取下降沿指令)。与左母线连接的常闭触点的下降沿检测指令。
使用示例:取指令与输出指令的使用如图3-13所示。
(2)取指令与输出指令的使用说明
1)LD、LDI指令既可用于输入左母线相连的触点,也可与ANB、ORB指令配合操作,目的元件为X、Y、M、T、C、S,用于分支电路的起点,实现块逻辑运算。
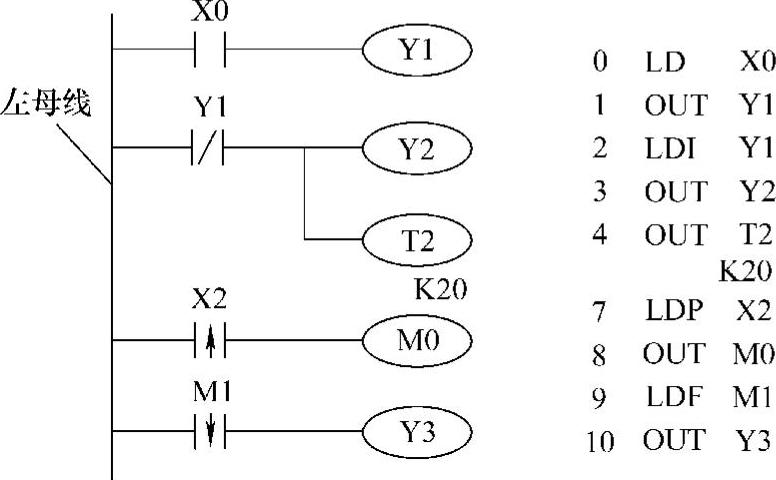
图3-13 取指令与输出指令的使用
2)LDP、LDF指令仅在对应元件有效时维持一个扫描周期的接通。如图3-13中,当M1有一个下降沿时,则Y3只有一个扫描周期为ON。
3)LD、LDI、LDP、LDF指令的目标元件为X、Y、M、T、C、S。
4)OUT指令用于驱动输出继电器、辅助继电器、定时器、计数器、状态继电器,但是不能用来驱动输入继电器,OUT指令目标元件为Y、M、T、C和S,但不能用于X。
5)OUT指令可以并行输出(连续使用若干次),在梯形图中相当于线圈是并联的,但是,输出线圈不能串联使用。
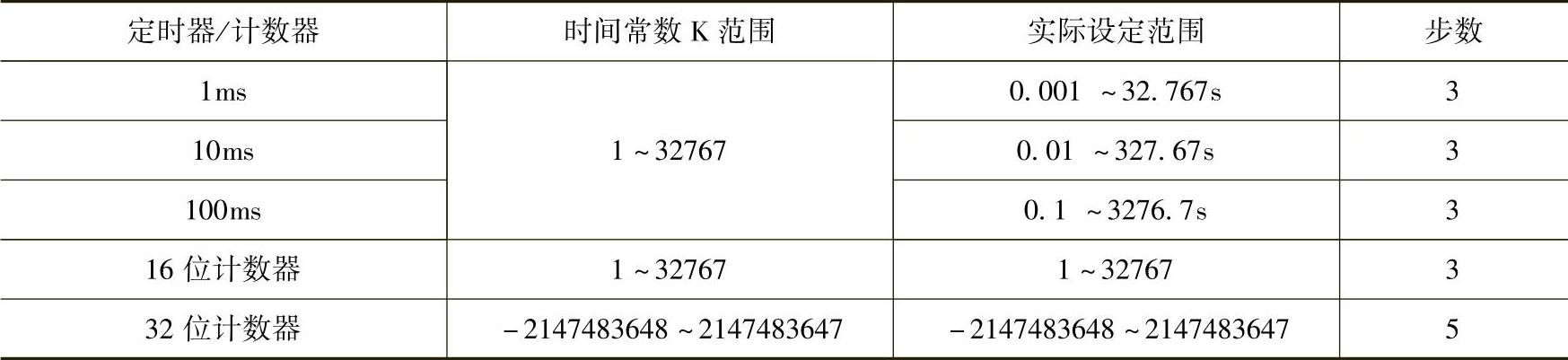
6)在对定时器/计数器使用OUT指令后,必须设置时间常数K,或指定数据寄存器的地址。常数K设置如表3-4所示。
表3-4 定时器/计数器时间常数K的设定
2.触点串联指令(AND/ANI/ANDP/ANDF)
AND/ANI/为触点串联指令,如表3-5所示。
表3-5 触点串联指令

(1)指令的含义
1)AND(与指令)。一个常开触点串联连接指令,完成逻辑“与”运算。
2)ANI(与非指令)。一个常闭触点串联连接指令,完成逻辑“与非”运算。
3)ANDP。上升沿检测串联连接指令。
4)ANDF。下降沿检测串联连接指令。
使用示例:触点串联指令的使用如图3-14所示。
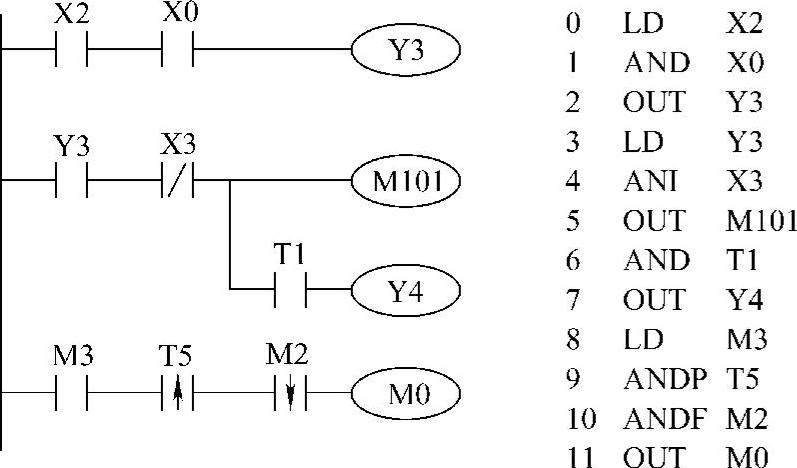
图3-14 触点串联指令的使用
(2)触点串联指令的使用说明
1)AND、ANI、ANDP、ANDF都指是单个触点串联连接的指令,串联次数没有限制,可反复使用。
2)AND、ANI、ANDP、ANDF的目标元件为X、Y、M、T、C和S。
3)当继电器的常开触点或常闭触点与其他继电器的触点组成的电路块串联时,也使用AND指令或ANI指令。
电路块就是由几个触点按一定的方式连接的梯形图。由两个或两个以上的触点串联而成的电路块,称为串联电路块;由两个或两个以上的触点并联连接而成的电路块,称为并联电路块;触点的混联就称为混联电路块。
3.触点并联指令(OR/ORI/ORP/ORF)
OR/ORI为触点并联指令,如表3-6所示。
表3-6 触点并联指令

(1)指令的含义
1)OR(或指令)。用于单个常开触点的并联,实现逻辑“或”运算。
2)ORI(或非指令)。用于单个常闭触点的并联,实现逻辑“或非”运算。
3)ORP。上升沿检测并联连接指令。
4)ORF。下降沿检测并联连接指令。
使用示例:触点并联指令的使用如图3-15所示。
(2)触点并联指令的使用说明
1)OR、ORI、ORP、ORF指令都是指单个触点的并联,并联触点的左端接到LD、LDI、LDP或LPF处,右端与前一条指令对应触点的右端相连。触点并联指令连续使用的次数不限。
2)OR、ORI、ORP、ORF指令的目标元件为X、Y、M、T、C、S。
OR和ORI指令引起的并联,是从OR和ORI一直并联到前面最近的LD和LDI指令上,并联的数量不受限制。操作目的元件为X、Y、M、T、C、S。
4.块操作指令(ORB/ANB)
(1)ORB(块或指令)
用于两个或两个以上的触点串联连接的电路之间的并联。
使用示例:ORB指令的使用如图3-16所示。
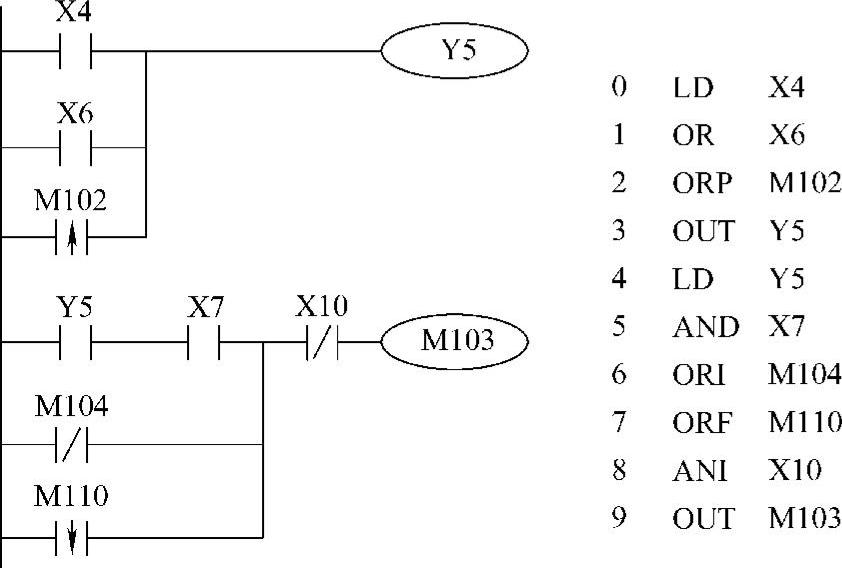
图3-15 触点并联指令的使用
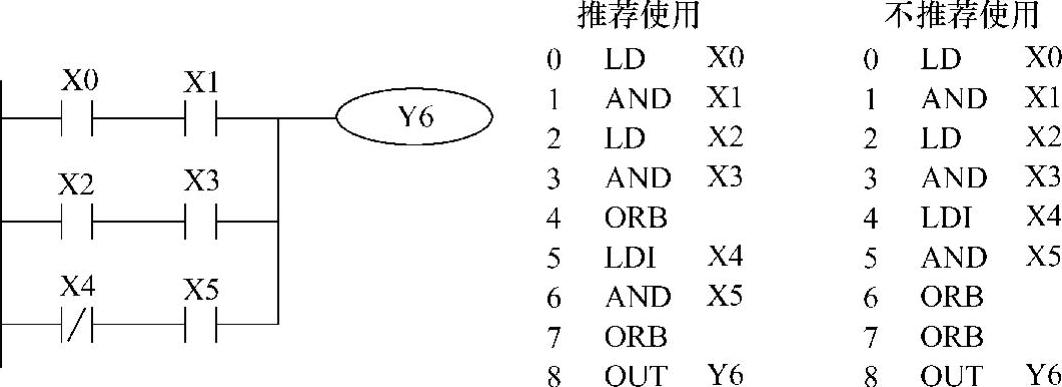
图3-16 ORB指令的使用
ORB指令的使用说明:
1)几个串联电路块并联连接时,每个串联电路块开始时应该用LD或LDI指令。
2)有多个电路块并联回路,如对每个电路块使用ORB指令,则并联的电路块数量没有限制。(https://www.xing528.com)
3)ORB指令也可以连续使用,但这种程序写法不推荐使用,LD或LDI指令的使用次数不得超过8次,也就是ORB只能连续使用8次以下。
(2)ANB(块与指令)
用于两个或两个以上触点并联连接的电路之间的串联。
使用示例:ANB指令的使用如图3-17所示。
ANB指令的使用说明:
1)并联电路块串联连接时,并联电路块的开始均用LD或LDI指令。
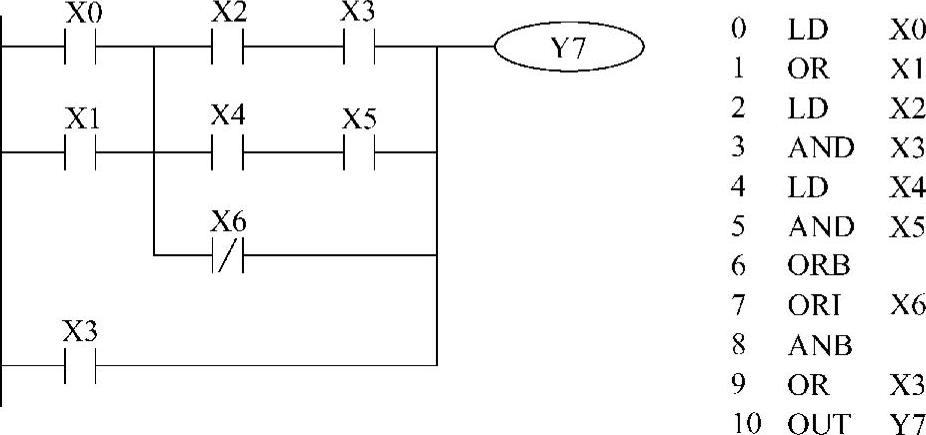
图3-17 ANB指令的使用
2)多个并联回路块连接按顺序和前面的回路串联时,ANB指令的使用次数没有限制。也可连续使用ANB,但与ORB一样,使用次数在8次以下。
5.置位与复位指令(SET/RST)
1)SET(置位指令)。它的作用是使被操作的目标元件置位并保持。
2)RST(复位指令)。使被操作的目标元件复位并保持清零状态。
使用示例:SET、RST指令的使用如图3-18所示。当X0常开触点接通时,Y0变为ON状态并一直保持该状态,即使X0断开Y0的ON状态仍维持不变;只有当X1的常开触点闭合时,Y0才变为OFF状态并保持,即使X1常开触点断开,Y0也仍为OFF状态。
SET、RST指令的使用说明:
1)SET指令的目标元件为Y、M、S,RST指令的目标元件为Y、M、S、T、C、D、V、Z。RST指令常被用来对D、Z、V的内容清零,还用来复位积算定时器和计数器。
2)对于同一目标元件,SET、RST可多次使用,顺序也可随意,但最后执行者有效。
6.微分指令(PLS/PLF)
1)PLS(上升沿微分指令)。在输入信号上升沿产生一个扫描周期的脉冲输出。
2)PLF(下降沿微分指令)。在输入信号下降沿产生一个扫描周期的脉冲输出。
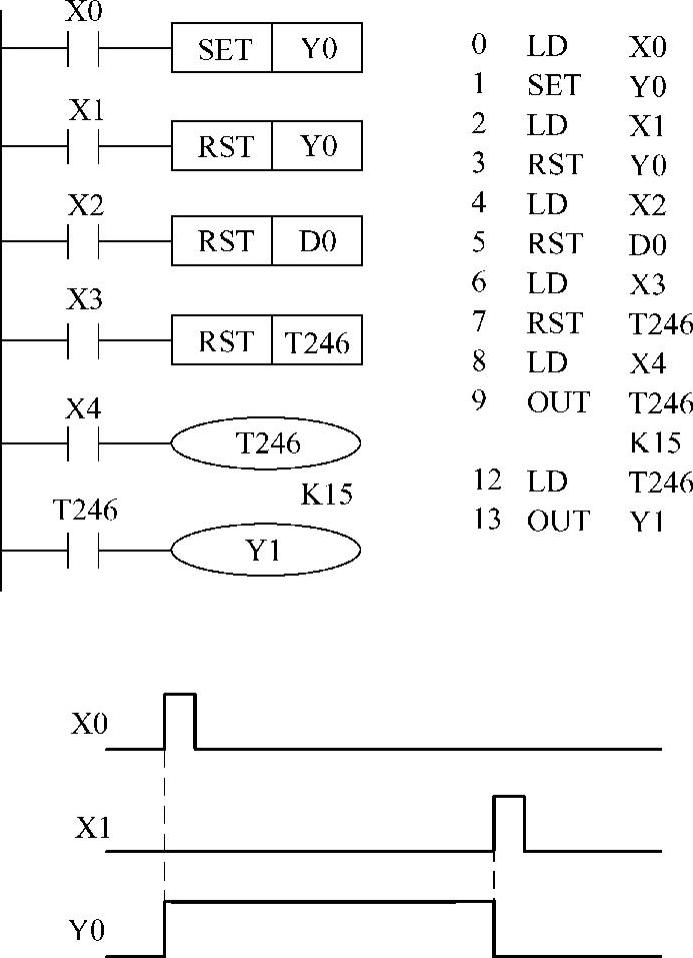
图3-18 置位与复位指令的使用
使用示例:微分指令的使用如图3-19所示,利用微分指令检测到信号的边沿,通过置位和复位命令控制Y0的状态。
PLS、PLF指令的使用说明:
1)PLS、PLF指令的目标元件为Y和M。
2)使用PLS时,仅在驱动输入为ON后的一个扫描周期内目标元件ON,如图3-19所示,M0仅在X0的常开触点由断到通时的一个扫描周期内为ON;使用PLF指令时只是利用输入信号的下降沿驱动,其他与PLS相同。
7.主控指令(MC/MCR)
在程序中常常会有这样的情况,多个线圈受一个或多个触点控制,要是在每个线圈的控制电路中都要串入同样的触点,将占用多个存储单元,应用主控指令就可以解决这一问题。
1)MC(主控指令)。用于公共串联触点的连接。执行MC后,左母线移到MC触点的后面。
2)MCR(主控复位指令)。它是MC指令的复位指令,即利用MCR指令恢复原左母线的位置。
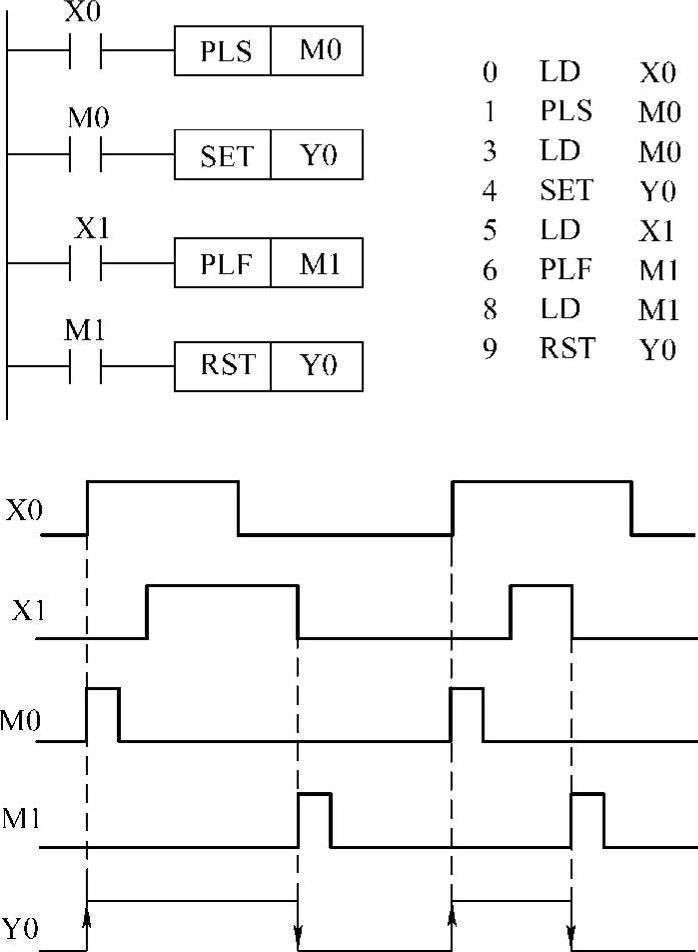
图3-19 微分指令的使用
使用示例:MC、MCR指令的使用如图3-20所示,利用MC N0 M100实现左母线右移,使Y0、Y1都在X0的控制之下,其中N0表示嵌套等级,在无嵌套结构中N0的使用次数无限制;利用MCR N0恢复到原左母线状态。如果X0断开则会跳过MC、MCR之间的指令向下执行。
MC、MCR指令的使用说明:
1)MC、MCR指令的目标元件为Y和M,但不能用特殊辅助继电器。MC占3个程序步,MCR占2个程序步。
2)主控触点在梯形图中与一般触点垂直(如图3-20中的M100)。主控触点是与左母线相连的常开触点,是控制一组电路的总开关。与主控触点相连的触点必须用LD或LDI指令。
3)MC指令的输入触点断开时,在MC和MCR之内的积算定时器、计数器、用复位/置位指令驱动的元件保持其之前的状态不变。非积算定时器和计数器,用OUT指令驱动的元件将复位,如图3-20中当X0断开,Y0和Y1即变为OFF。
4)在一个MC指令区内若再使用MC指令称为嵌套。嵌套级数最多为8级,编号按N0→N1→N2→N3→N4→N5→N6→N7顺序增大,每级的返回用对应的MCR指令,从编号大的嵌套级开始复位。
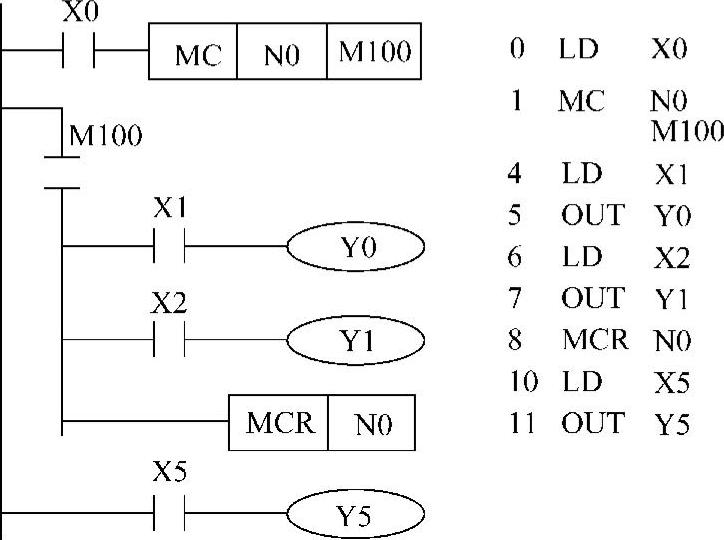
图3-20 主控指令的使用
8.堆栈指令(MPS/MRD/MPP)
堆栈指令是FX系列中新增的基本指令,用于多重输出电路,为编程带来便利。在FX系列PLC中有11个存储单元,它们专门用来存储程序运算的中间结果,被称为栈存储器。
1)MPS(进栈指令)。将运算结果送入栈存储器的第一段,同时将先前送入的数据依次移到栈的下一段。
2)MRD(读栈指令)。将栈存储器的第一段数据(最后进栈的数据)读出且该数据继续保存在栈存储器的第一段,栈内的数据不发生移动。
3)MPP(出栈指令)。将栈存储器的第一段数据(最后进栈的数据)读出且该数据从栈中消失,同时将栈中其他数据依次上移。
使用示例:堆栈指令的使用如图3-21所示,其中图3-21a为一层栈,进栈后的信息可无限使用,最后一次使用MPP指令弹出信号;图3-21b为二层栈,它用了两个栈单元。
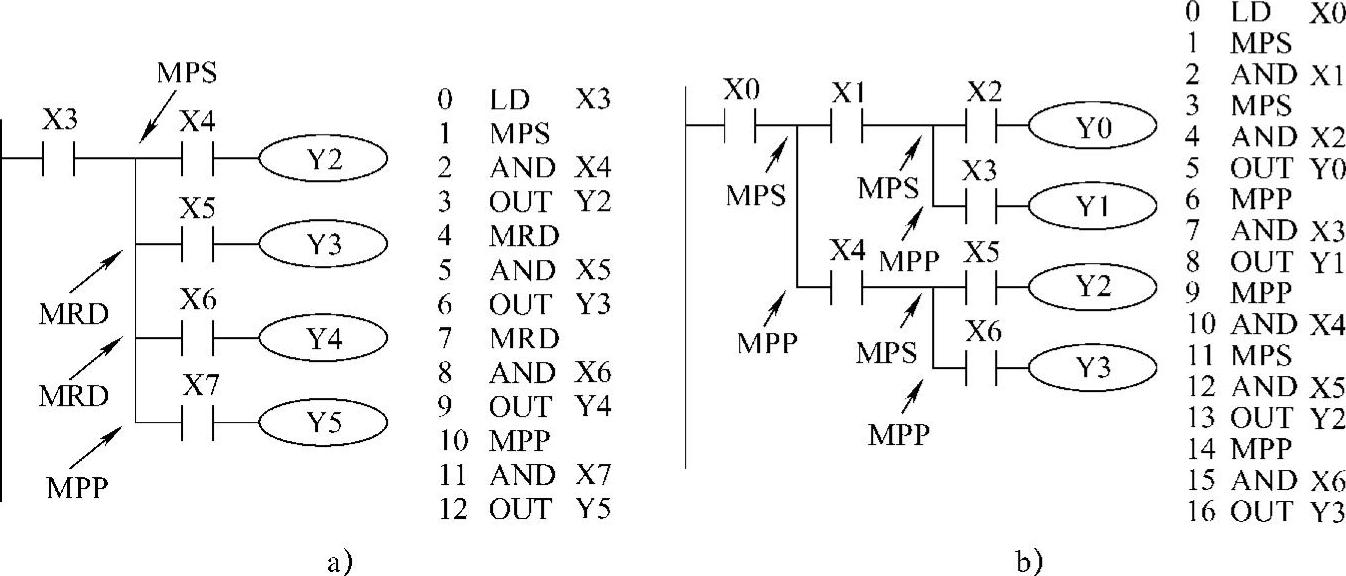
图3-21 堆栈指令的使用
a)一层栈 b)二层栈
堆栈指令的使用说明:
1)堆栈指令没有目标元件。
2)MPS和MPP必须配对使用。
3)由于栈存储单元只有11个,所以栈的层次最多为11层。
9.逻辑反、空操作与结束指令(INV/NOP/END)
(1)INV(反指令)
执行该指令后将原来的运算结果取反。
使用示例:反指令的使用如图3-22所示,如果X0断开,则Y0为ON,否则Y0为OFF。使用时应注意INV不能像指令表的LD、LDI、LDP、LDF那样与母线连接,也不能像指令表中的OR、ORI、ORP、ORF指令那样单独使用。

图3-22 反指令的使用
(2)NOP(空操作指令)
不执行操作,但占一个程序步。执行NOP时并不做任何事,有时可用NOP指令短接某些触点或用NOP指令将不要的指令覆盖。当PLC执行了清除用户存储器操作后,用户存储器的内容全部变为空操作指令。
(3)END(结束指令)
无操作元件,其功能是输入/输出处理和返回到0步程序。若程序的最后不写END指令,则PLC不管实际用户程序多长,都从用户程序存储器的第一步执行到最后一步;若有END指令,当扫描到END时,则结束执行程序,这样可以缩短扫描周期。执行END指令时,也刷新监视定时器,检测扫描周期是否过长。在程序调试时,可在程序中插入若干END指令,将程序划分若干段,在确定前面程序段无误后,依次删除END指令,直至调试结束。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。