



【摘要】:为了使来自于不同用户的上行链路重传消息能够到达eNodeB处,需要用到定时控制过程。只有当实际需要进行定时调整时,才会发送定时提前命令。定时提前命令的分辨率为0.52μs,定时提前是根据UE接收到的下行链路无线帧定时进行定义的。此外,当eNodeB试图建立上行链路同步时,针对上行链路定时测量,它可以为UE在RACH上分配一个专用前导。从针对定时提前的覆盖范围定义来看,通过预留部分资源,覆盖范围达到100km的蜂窝将是非常有益的。
为了使来自于不同用户的上行链路重传消息能够到达eNodeB处(实际上包含在循环前缀内),需要用到定时控制过程。为了避免用户之间的干扰,需要用到上行链路同步技术,这些用户的上行链路传输信息在同一子帧上进行调度。eNodeB连续对UE上行链路信号的定时进行测量,并对上行链路传输定时进行调整,如图5-40所示。只有当实际需要进行定时调整时,才会发送定时提前命令。定时提前命令的分辨率为0.52μs,定时提前是根据UE接收到的下行链路无线帧定时进行定义的。
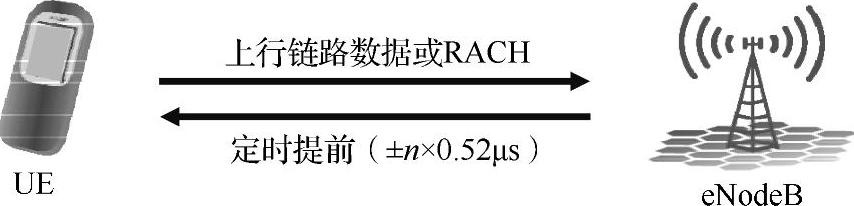
图5-40 上行链路定时控制(https://www.xing528.com)
当UE中不存在合法的定时提前值(即UE的上行链路不同步)时,定时提前值可以根据RACH传输进行测量。当UE处于RRC_IDLE状态或其休止周期超过相关定时器时,以及进行非同步切换时或无线链路失败后,这些情况都属于系统接入。此外,当eNodeB试图建立上行链路同步时,针对上行链路定时测量,它可以为UE在RACH上分配一个专用(无竞争的)前导。对于非同步UE来说,当进行切换时,或者当下行链路数据到达时,就会面临这些情况。从针对定时提前的覆盖范围定义来看,通过预留部分资源,覆盖范围达到100km的蜂窝将是非常有益的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。