



组态完成后设备操作控制面板PMU显示报警A083,A083表示无用数据或无效使用数据来自DP主站。此时通过PLC编写程序并下载,向设备发送一个第十位为1的控制字即可解除报警,恢复正常O7.0。
OB1程序:
M50.0=1时MOVE指令将控制字W#16#8C7F(此控制字参考资料数据,控制字各位含义及包含的启动信息参考图9-33)传送至PQW264,PQW264连接设备K3001,K3001连接至P648,P648为控制字1的源。实现将控制字及启动信息传送至设备,启动调速装置如图9-36所示。
MD126中为0~100范围内输出速度控制值,使用FC106“UNSCALE”模块将此实数值进行工程值反整定对应PLC输出最小最大值,输出至PQW266,PQW266连接设备K3002,K3002连接P644.001,P644.001为主给定值的源。实现将转速给定值传送至设备,作为电流环给定值,PID输出控制值的工程值反整定如图9-37所示。
UNSCALE功能接收一个以工程单位表示、且标定于下限和上限(LO_LIM和HI_LIM)之间的实型输入值(IN),并将其转换为一个整型值,将结果写入OUT。
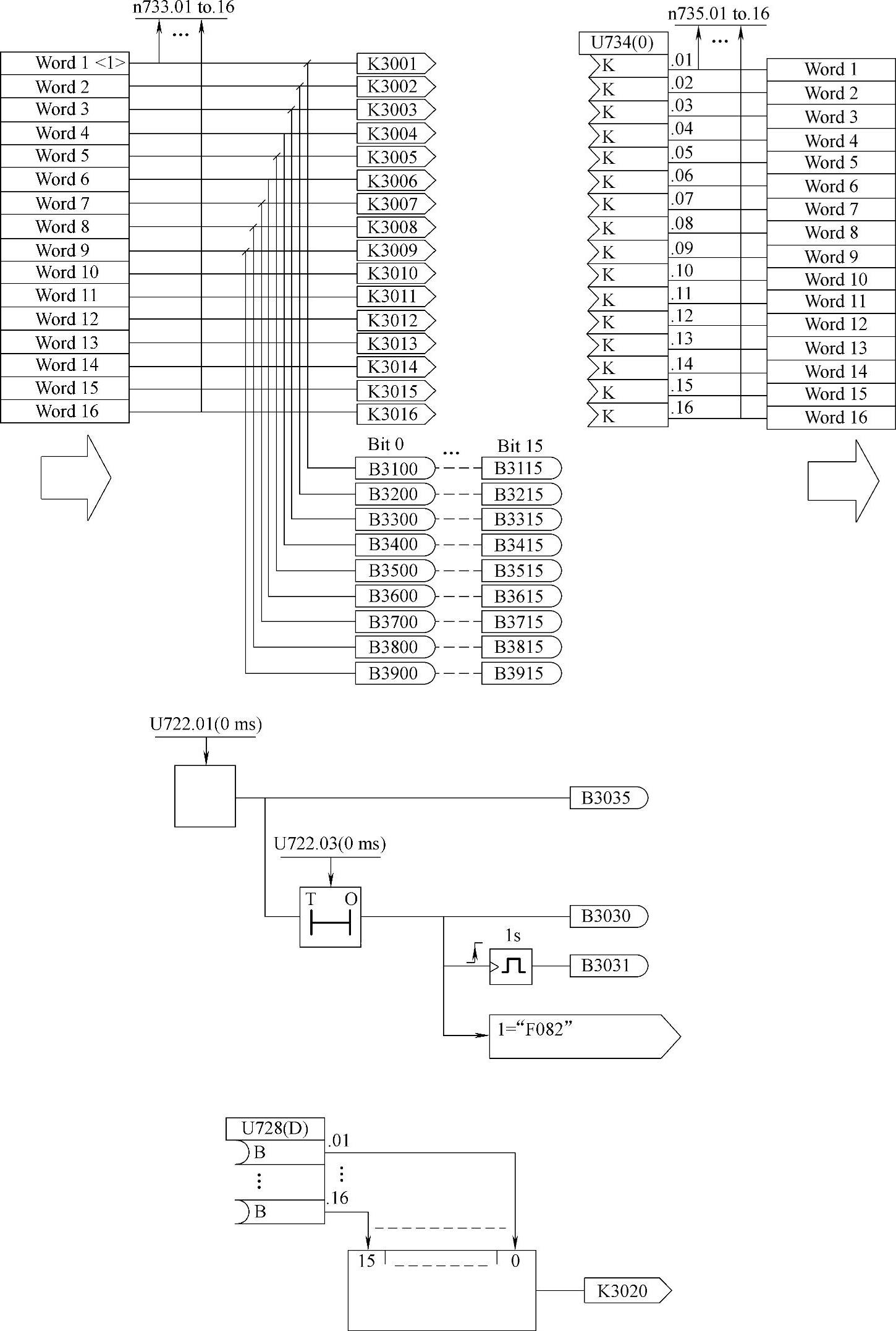
图9-35 CBP板数据交换
UNSCALE功能使用以下等式:
OUT=[((IN-O_LIM)/(HI_LIM-O_LIM))*(K2-1)]+K1
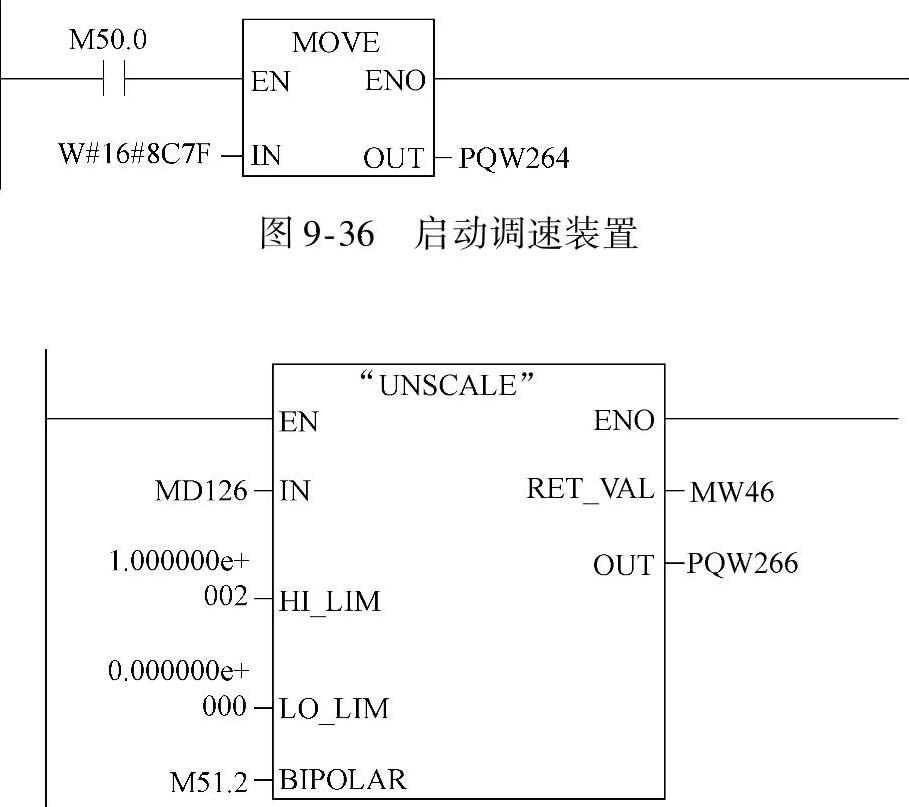
图9-37 PID输出控制值的工程值反整定
根据输入值是BIPOLAR还是UNIPOLAR设置常数K1和K2。
BIPOLAR:假定输出整型值介于-27648~27648之间,因此,K1=-27648.0,K2=27648.0。
UNIPOLAR:假定输出整型值介于0~27648之间,因此,K1=0.0,K2=27648.0。(https://www.xing528.com)
如果输入值超出LO_LIM和HI_LIM范围,输出(OUT)将钳位于距其类型(BIPO-LAR或UNIPOLAR)的指定范围的下限或上限较近的一方,并返回一个错误。
K167为实际速度值,K167连接U734.002,U734.002连接PIW266,MOVE指令将实际速度值经PIW266传送至PLC内存MW2中,如图9-38所示。
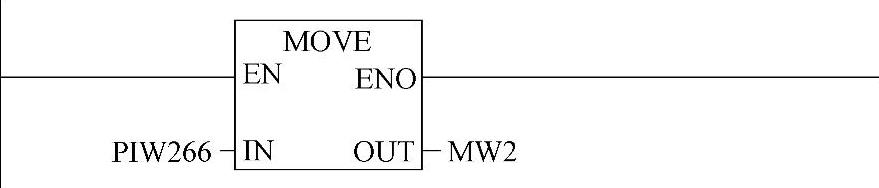
图9-38 速度值传送
MW2中为速度反馈控值,使用FC105“SCALE”模块将此实数值进行工程值整定,将输入PLC的最大最小值转换为0~100内的实数,输出至MW48,如图9-39所示。
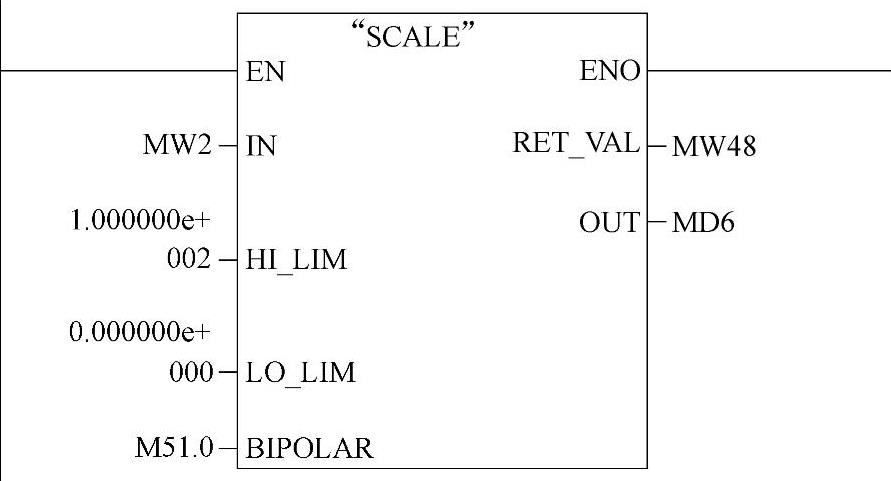
图9-39 输入速度值的工程值整定
SCALE功能接收一个整型值(IN),并将其转换为以工程单位表示的介于下限和上限(LO_LIM和HI_LIM)之间的实型值,将结果写入OUT。SCALE功能使用以下等式:
OUT=[((FLOAT(IN)-K1)/(K2-K1))*(HI_LIM-LO_LIM)]+LO_LIM
常数K1和K2根据输入值是BIPOLAR还是UNIPOLAR设置。
BIPOLAR:假定输入整型值介于-27648~27648之间,因此K1=-27648.0,K2=27648.0。
UNIPOLAR:假定输入整型值介于0~27648之间,因此K1=0.0,K2=27648.0。如果输入整型值大于K2,输出(OUT)将钳位于HI_LIM,并返回一个错误。如果输入整型值小于K1,输出将钳位于LO_LIM,并返回一个错误。
通过设置LO_LIM>HI_LIM可获得反向标定。使用反向转换时,输出值将随输入值的增加而减小。监视修改MD126数值,即可实现转速控制,同时可以在MD6查看实际速度返回值。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。