



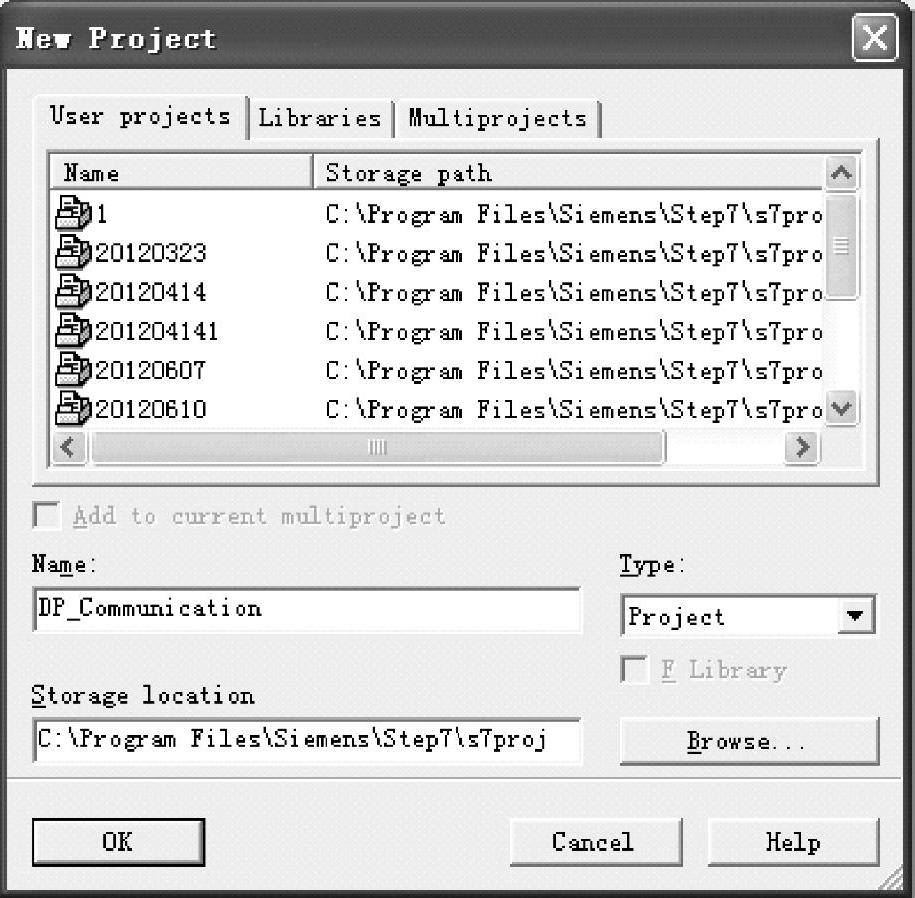
图9-28 创建新工程
1.创建新工程
在SIMATIC MANAGER界面下选择创建新工程,如图9-28所示。
OPTIONS→SET PC/PG:选择MPI通信卡,实现PC和PLC间MPI通信。
2.组态S7-300站
在工程下插入SIMATIC 300 STA-TION(见图9-29),打开硬件组态界面,首先插入导轨,按照槽号依次将各个模块插入。插入CPU时弹出PROFI-BUS-DP组态界面,地址设定为2,选择“NEW”新建DP总线,波特率为1.5Mbit/s,行规DP(见图9-30)。完成后保存→编译→下载。
3.组态MASTERDRIVE从站
CATLOG硬件目录内:PROFIBUS-DP→SIMOREG→MASTERDRIVES/DC MASTER CBP2 DPV1。
将6RA70作为从站挂在DP线上,地址设定为3,如图9-31所示。
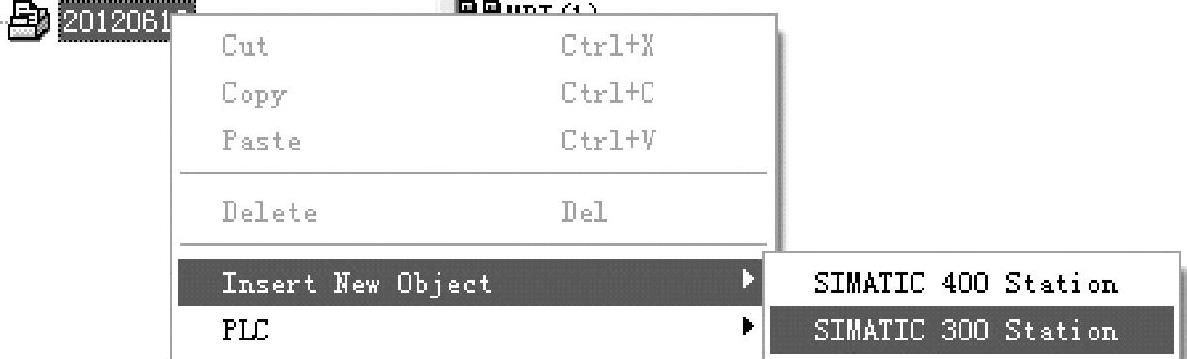
图9-29 插入S7-300站
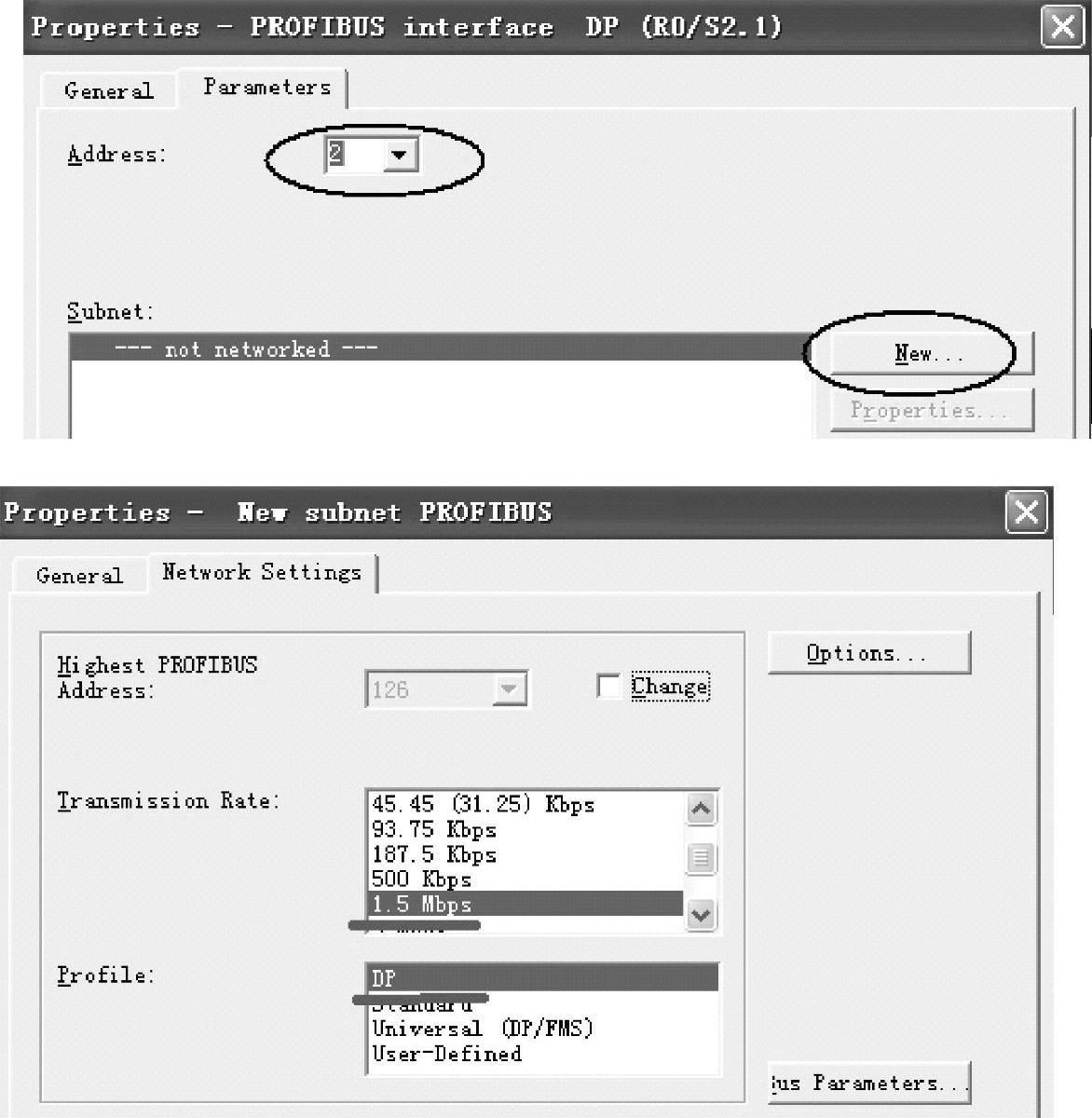
图9-30 DP组态
4.从站中插入模板
在从站中插入模板,以确定报文结构。此过程类似组态ET200从站。
PROFIBUS-DP借助报文进行数据交换。在每一个报文中,有用数据都分成参数(参数识别值,PKW)和过程数据(PZD)两部分被传输。(https://www.xing528.com)
在PKW范围内,所有需要读或写的参数值或由参数特性确定读的数据都被传输。在PZD范围内,包含了所有的为了控制一个调速系统所必需的信息。控制信息(控制字)和给定值由PROFIBUS-DP主动装置传送给从动装置。控制字与模板输入地址PIW、输出地址PQW对应。
PPO=Parameter-Process data-Object,即参数过程数据对象。它规定了PLC与驱动装置通信时报文中有效数据的结构,符合PROFIBUS补充协议“variable-speed drives profile”。共有PPO1~PPO5五种类型,如图9-32所示。具体选用哪种PPO类型需要与传动工程师协定。
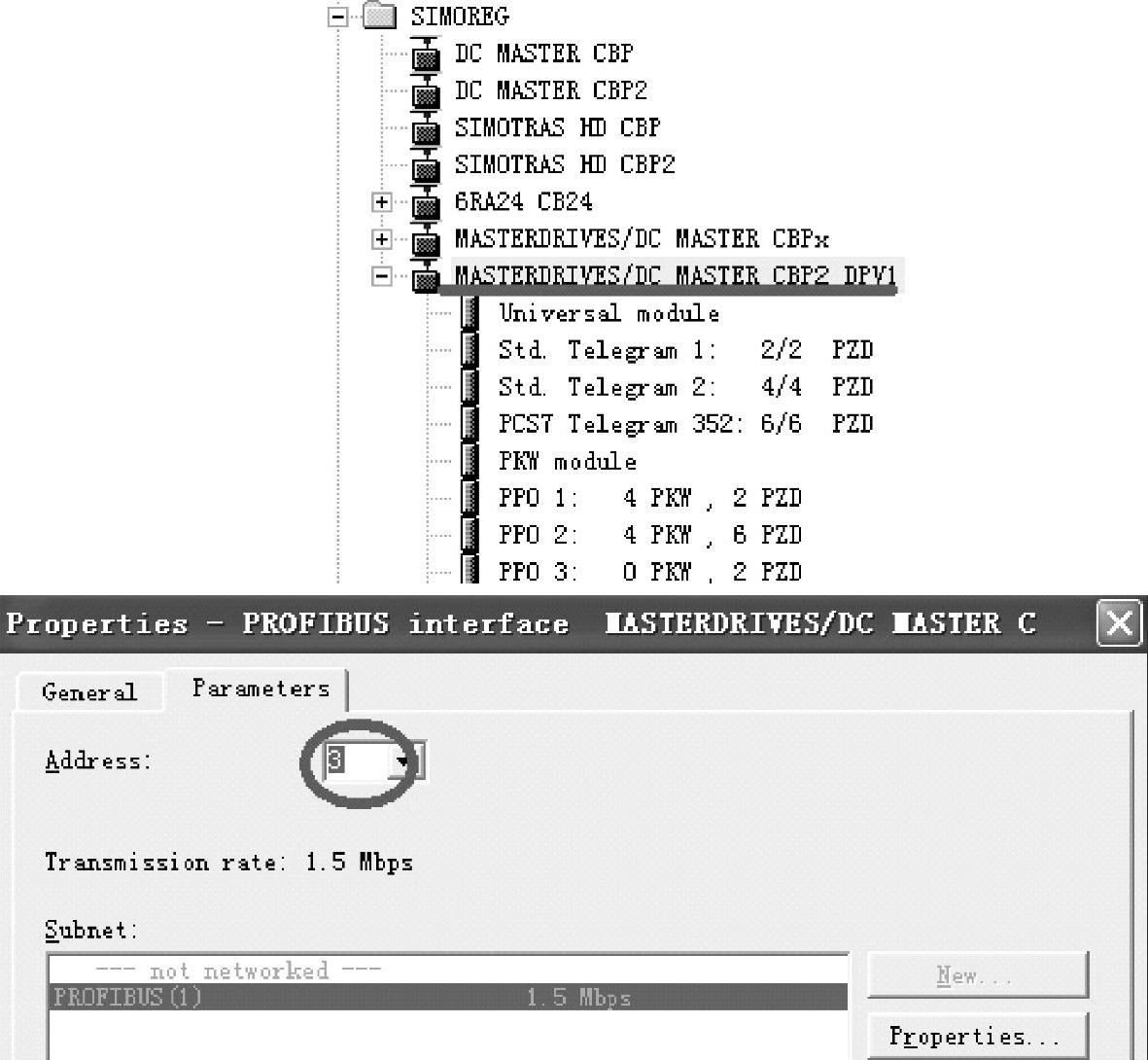
图9-31 组态CBP2
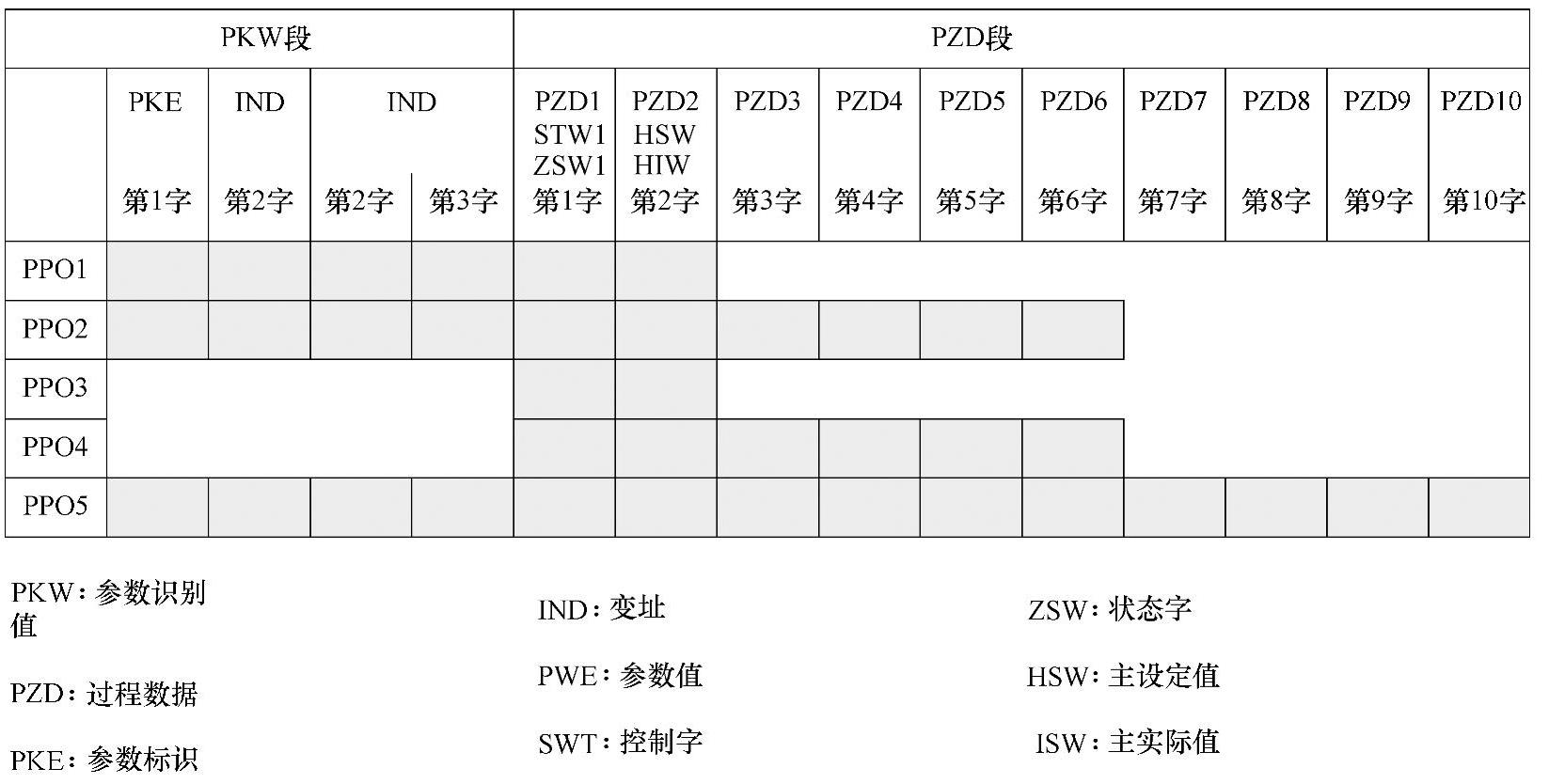
图9-32 五种PPO类型
•PPO1:4PKW,2PZD:PPO1,4个字参数数据,用SFC14/15编程;2个字过程数据,用MOVE指令(L/T指令)编程;
•PPO2:4PKW,6 PZD:PPO 2,4个字参数数据,用SFC14/15编程;6个字过程数据,用SFC14/15编程;
•PPO3:0PKW,2PZD:PPO3,没有参数数据,2个字过程数据,用MOVE指令(L/T指令)编程;
•PPO4:0PKW,6PZD:PPO4,没有参数数据,6个字过程数据,用SFC14/15编程;
•PPO5:4 PKW,10PZD:PPO5,4个字参数数据,用SFC14/15编程;10个字过程数据,用SFC14/15编程;
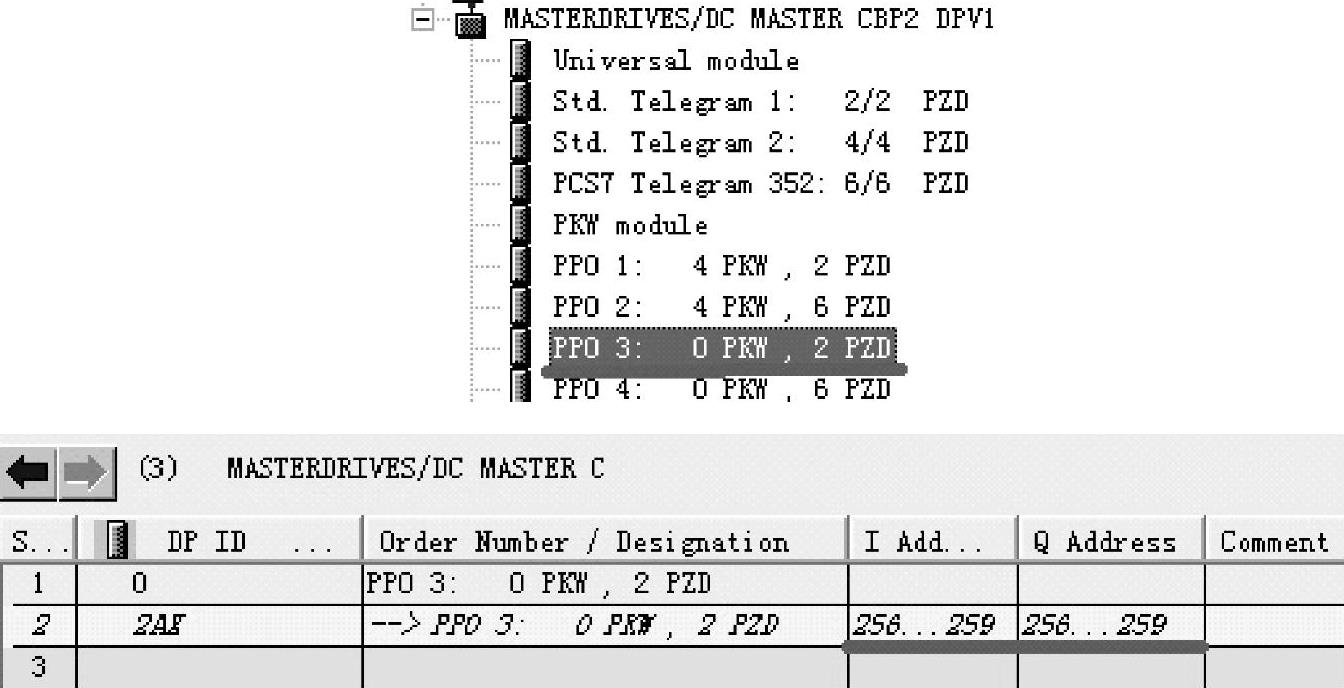
图9-33 组态从站模板
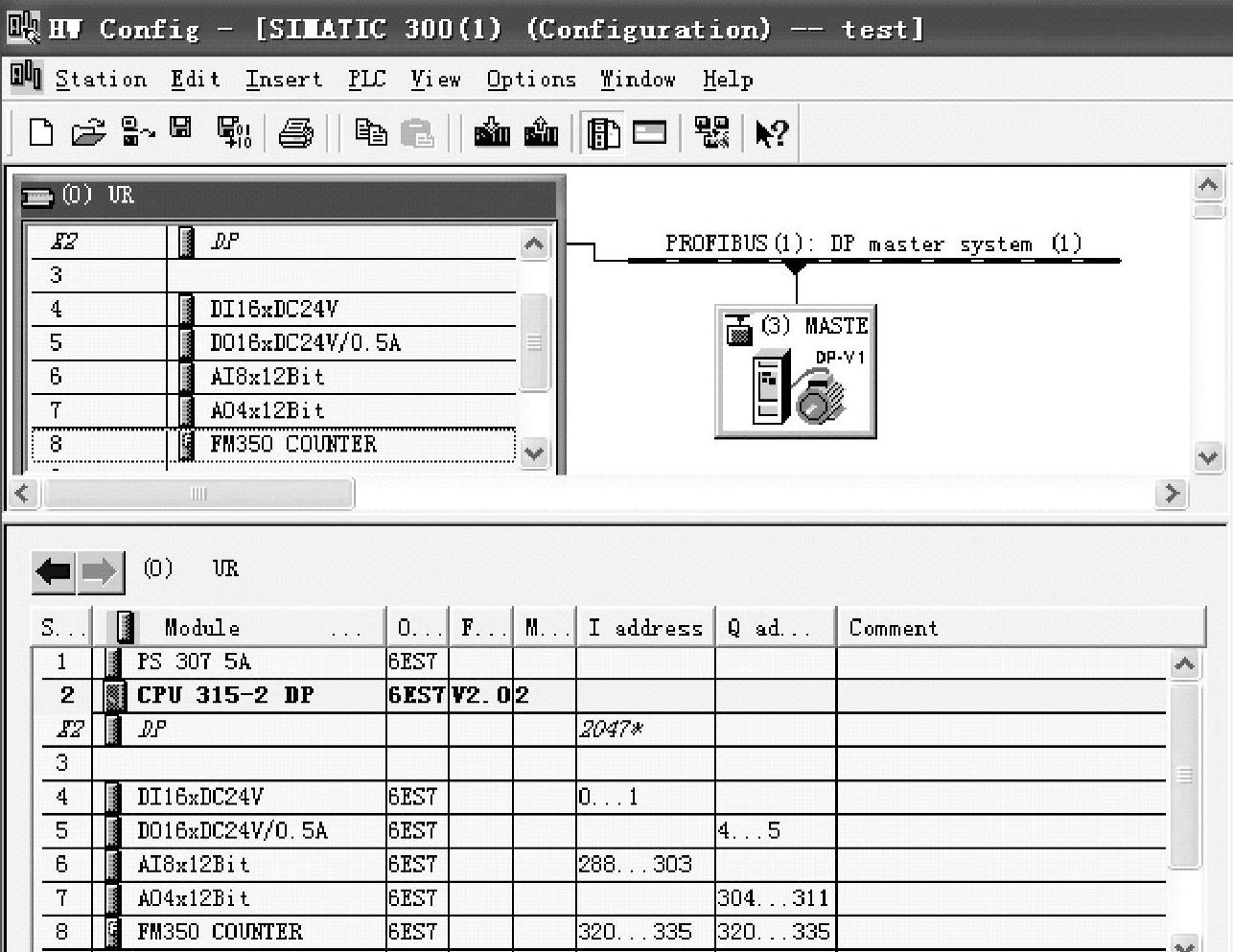
图9-34 组态完成图
仅使用PZD第一字和第二字即可实现最简单的控制。本实验中使用PPO3型,PKW段为0,PZD段字长为2,组态从站模板如图9-33所示。完成对输入映像区PIW和输出映像区PQW的设定,表示DP通信输入地址PIW256~259,输出地址PQW256~259,单位字节Byte。PQW第一字作为控制字,传送控制信息,控制字Bit10必须为1,控制信息才能有效;PQW第二字传输参数给定值,PIW第二字传输实际返回值,组态完成,如图9-34所示。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。