



全数字直流调速系统的主给定有模拟量给定输入、数字给定输入,其中,数字给定输入包括固定给定值、点动给定值、爬行给定值。
1.模拟量给定输入
在9.1.2节中介绍了模拟量输入,端子4、5是主给定模拟量输入端,模拟量输入的值变换为数字值后可通过参数进行规格化、滤波、符号选择及偏置处理后灵活地输入,模拟量输入可用作连接器,连接器K0011为端子4/5(主给定值),规格化后接入偏置,滤波的主给定模拟输入,r001显示的为主给定的模拟输入值。
2.固定给定值
“固定给定值”功能可以在“运行”状态下由“调节器使能”信号激活。
“固定给定值”功能可以通过由参数P430的.01~.08选择开关量连接器来设置,或通过控制字2的第4位和第5位(=完整控制字的第20位和21位)。“固定给定值”功能图连接如图9-13所示。
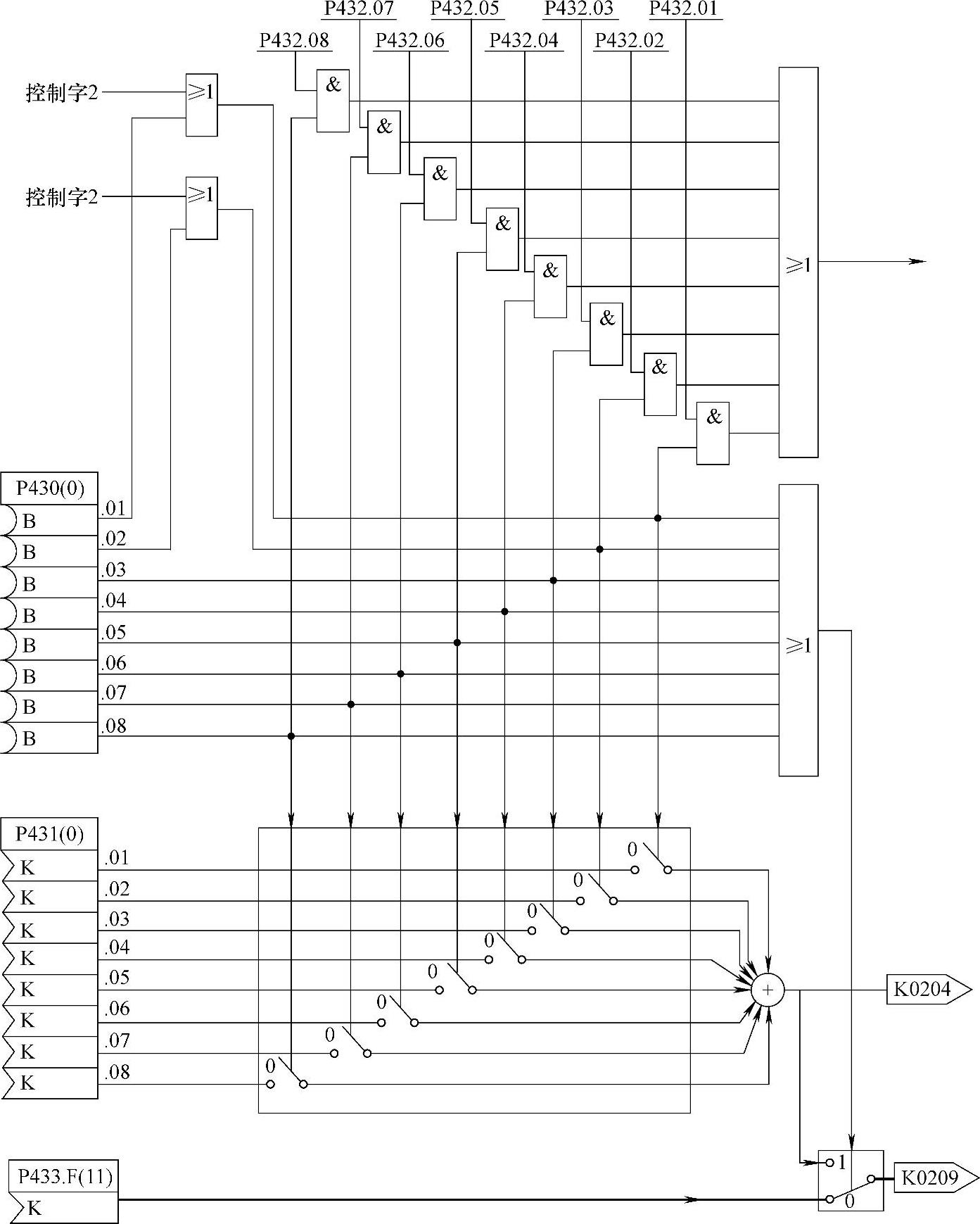
图9-13 固定给定值功能图连接
当使用控制字方法时,以下为可能的运行方式:
P649=9:控制字2的控制位为连续输入,由P680和P681选择的开关量连接器定义了控制字2的第4位和第5位(=完整控制字的第20位和21位),因而作为控制“固定给定值”功能的输入。
P649≠9:通过P649选择的连接器作为控制字2,这个字的第4位和第5位控制“固定设定值”的输入。
“固定设定值”功能是当一个或多个指定的源(开关量连接器,控制字位)变为逻辑“1”状态时输入。这种情况下,在参数P431中选择的给定被分配给每一个源。如果“固定设定值”指令是同时通过多个源输入,则给定值是叠加关系(限制到±200%)。
参数P432可以作为定义每一个可能的固定给定的源(开关量连接器,控制字位-逻辑操作)的设置,不论如何斜坡函数发生器必须旁路。当斜坡函数发生器旁路后,以上升/下降时间为0运行。
输入固定设定值功能的顺序:固定设定值代替主给定输入。
取消固定设定值功能的顺序:当所有可能接入固定给定的源(开关量连接器,控制字位)已改变回逻辑“0”,由参数P433选择的给定值(主给定)被重新接入,应用到K0209。
固定给定值参数设定说明见表9-13。
表9-13 固定给定值参数设定说明

3.振荡、方波发生器
“振荡、方波发生器”功能:参数P480~P483决定了一个矩形波信号的波形(振荡给定K0203)。在P480中的设置值决定了在P481中设置的时间周期的信号电平,在P482中的设置值决定了在P483中设置的时间周期的信号电平。振荡:在P485中选择,自由运行的矩形信号转换到输出K0208。振荡、方波发生器的功能图如图9-14所示。
振荡、方波发生器参数设定说明见表9-14。

图9-14 振荡、方波发生器的功能图
表9-14 振荡、方波发生器参数设定说明

4.点动给定值
“点动给定值”功能只在有“分闸”和“运行使能”指令时才可以执行。
“点动给定值”功能可以通过由参数P435的变址.01~.08选择的开关量连接器来设置,或通过控制字1的第8和第9位设置。点动给定值功能图如图9-15所示。
当选择使用控制字时,以下为可能的运行模式:
P648=9:控制字1中的控制位为位连续输入,由P668和P669选择的开关量连接器定义了控制字1的第8位和第9位,因而作为“点动”指令的输入。(https://www.xing528.com)
P648≠9:由P648选择的连接器作为控制字1,这个字的第8位和第9位控制了“点动”指令的输入。
“点动”指令当一个或多个指定的源(开关量连接器,控制字位)变为逻辑“1”状态时输入,在这种情况下,在参数P436中选择的给定被分配给每一个源。如果点动指令同时由两个或两个以上的源输入,则点动给定设为0。参数P437可以作为定义每一个可能的点动指令的源(开关量连接器,控制字位-逻辑运算)的设置,不论如何斜坡函数发生器必须旁路,当斜坡函数发生器旁路后,以上升/下降时间为0运行。
输入点动指令的操作顺序:如果输入了“点动”指令,通过“进线接触器闭合”继电器使进线接触器合闸,点动给定通过斜坡函数发生器施加。

图9-15 点动给定值功能图
撤销点动指令的操作顺序:在“点动”指令取消后,开始的运行顺序与“分闸”方式相同,在到达n<nmin后,调节器禁止,并且在0~60s的参数延时(P085)到达后(运行状态O7.0或更高),进线接触器打开。当驱动装置在参数延时周期(最大60.0s)时间到时,仍处在运行状态O1.3。
点动给定值的参数设定说明见表9-15。
表9-15 点动给定值的参数设定说明

5.爬行给定值
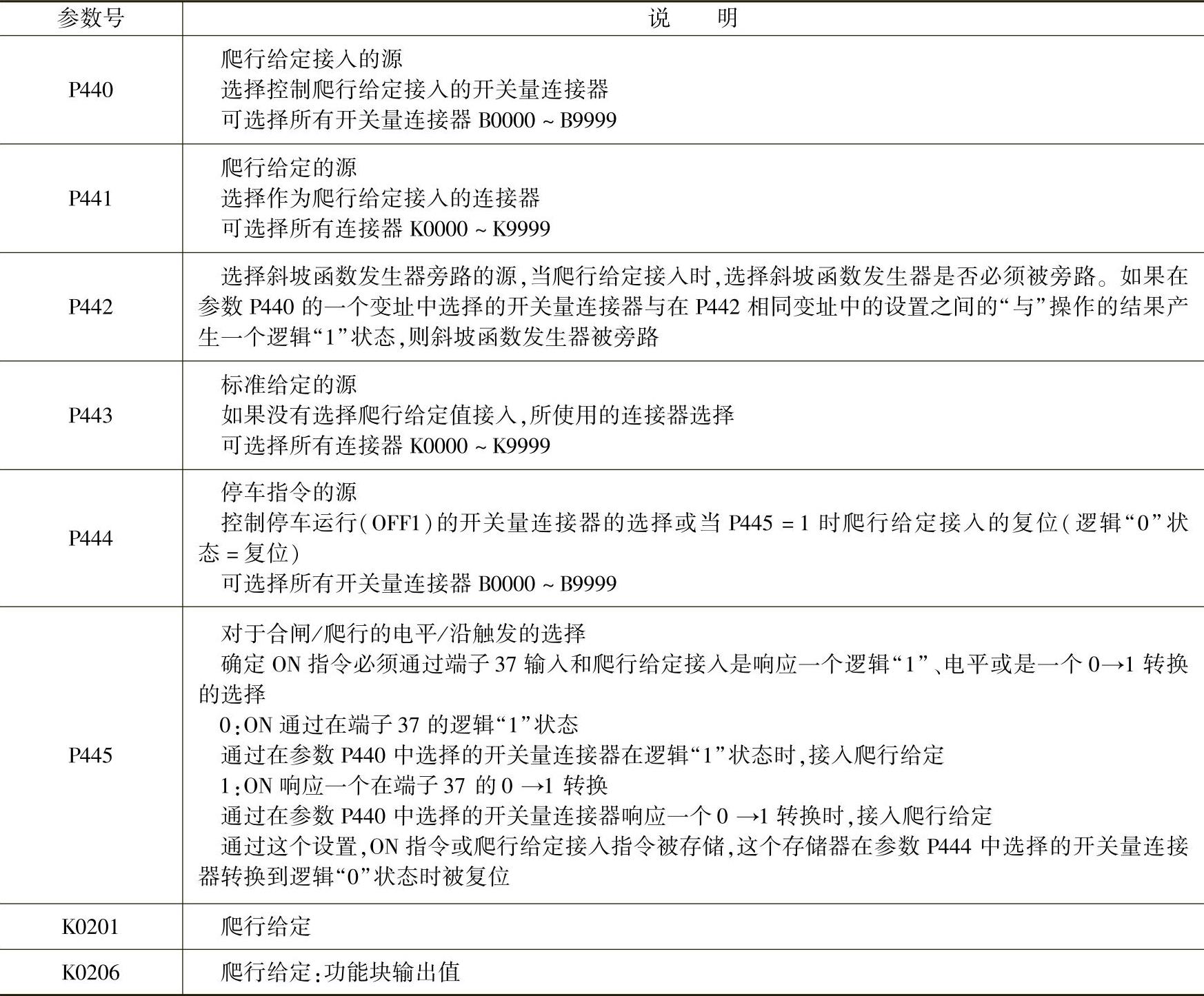
“爬行”功能可在运行状态O7.0下激活,并且有“运行使能”信号,进入运行状态。爬行给定值功能图如图9-16所示。当由P440选择的一个或多个开关量连接器转换到逻辑“1”时,输入“爬行”指令。一个由参数P441选择的给定分配给每一个开关量连接器,如果“爬行”指令是通过多个开关量连接器同时输入,给定值是叠加关系(限制到±200%)。
参数P442可以作为定义每一个可能的爬行指令的源(开关量连接器)的设置,不论如何斜坡函数发生器必须旁路,当斜坡函数发生器旁路后,以上升/下降时间为0运行。
电平/沿:
P445=0:电平触发;
P440选择的开关量连接器=0:无爬行;
P440选择的开关量连接器=1:爬行;
P445=1:沿触发。
当开关量连接器状态由0变1时,“爬行”输入储存。同时,由P444选择的开关量连接器必须为逻辑“1”。当随后的开关量连接器改变状态到逻辑“0”时,存储器被复位。
输入爬行指令的操作顺序:
如果在运行状态O7.0输入“爬行”指令,通过“进线接触器闭合”继电器使进线接触器合闸,爬行给定通过斜坡函数发生器施加。
如果在“Run”状态下输入“爬行”指令。驱动装置通过斜坡函数发生器从工作速度减速到爬行速度。
撤销爬行指令的操作顺序:
“爬行”有效,但无“合闸”指令:如果所有对于“爬行”功能有效的位均转换到逻辑“0”,调节器禁止。在n<nmin到达后,进线接触器断开(运行状态O7.0或更高)。

图9-16 爬行给定值功能图
从“运行”状态的“爬行”有效:如果所有对于“爬行”功能有效的位均转换到逻辑“0”并且运行状态“RUN”的条件仍然满足,则驱动装置通过斜坡函数发生器从设置的爬行给定速度加速到运行速度。
爬行给定值参数设定说明见表9-16。
表9-16 爬行给定值参数设定说明
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。