



1.通过BOP面板操作实现对MM440变频器的快速调试
根据变频器的输出电压范围和电动机的额定输入电压(星形联结和三角形联结的额定输入电压不同,见图8-59),选择星形联结还是三角形联结方式。
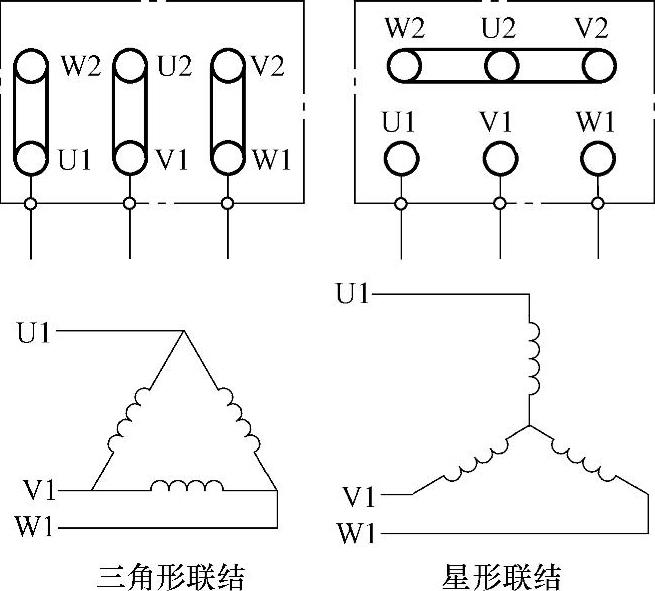
图8-59 电动机联结方式
本实验所用的电动机,三角形联结时的额定输入电压为230V,星形联结时的额定输入电压为400V,而MM440的输出电压范围为0~460V,故电动机两种联结方式均可。
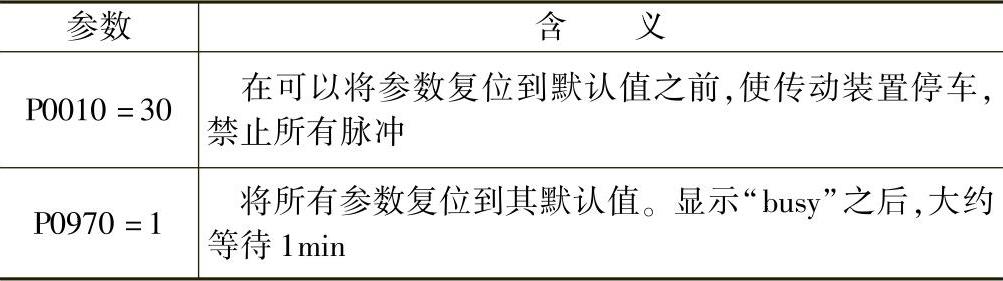
首先将变频器恢复至出厂设置,见表8-11。
表8-11 恢复出厂设置
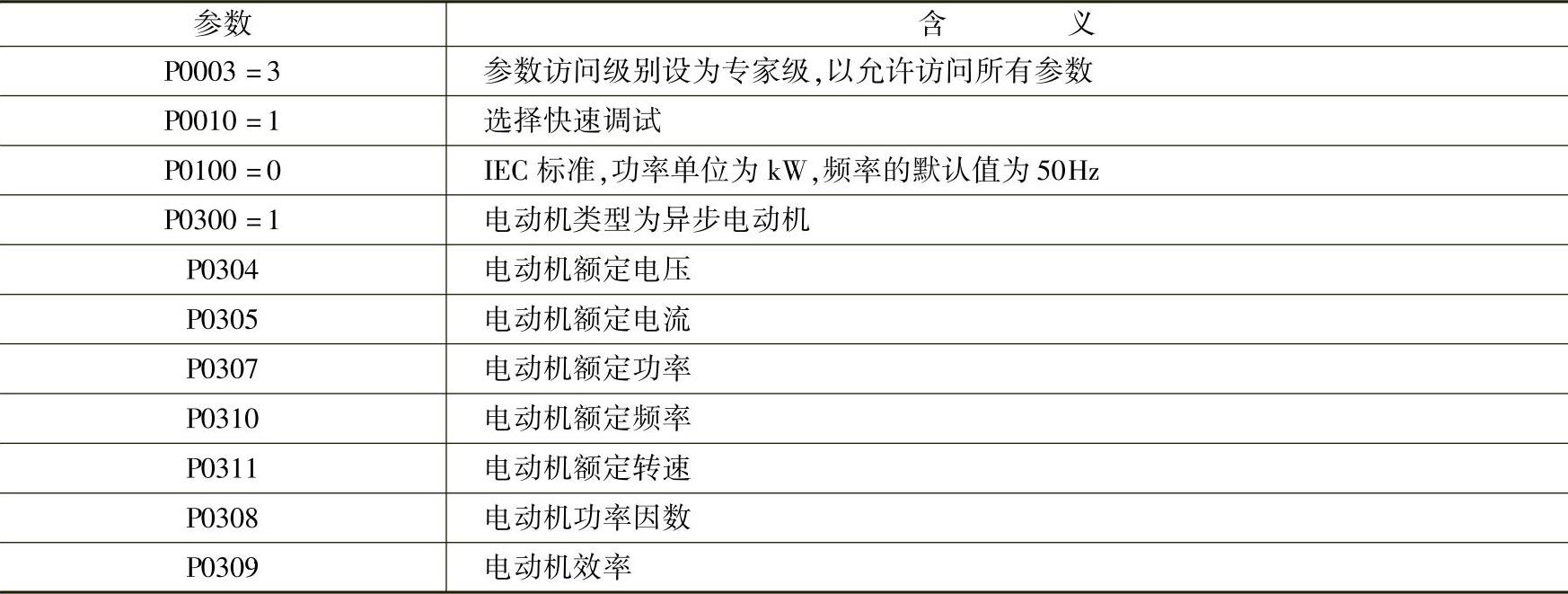
进行变频器快速调试,见表8-12。
表8-12 快速调试
注意:出厂默认P0700=2,即:指令源来自端子排上的数字量输入。若要使用PROFI-BUS进行通信,需要进行通信参数设置,见表8-13。
表8-13 在MM440变频器BOP操作面板上进行通信参数设置

注意:这里的地址应该与硬件组态的MM440变频器的地址一致,并且,能用参数P0918设置总线地址的前提是DIP开关为0,因为硬件地址优先。
2.使用SIMATIC STEP7软件进行硬件组态
针对本实验的具体硬件型号和通信模块类型,新建一个项目,进行硬件组态。在硬件组态窗口右边的视图里,展开SIMATIC 300,插入“Rail”。点击第一槽,插入电源模块。在第二槽,组态一个CPU模块,默认主站地址为2,通信波特率为1.5Mbit/s。按照上述方法,分别组态数字量输入模块、数字量输出模块、模拟量输入模块、模拟量输出模块以及计数器模块。
在“PROFIBUS(1):DP master system(1)”上,对MM440变频器进行组态:
单击导轨上的“PROFIBUS(1):DP master sys-tem(1)”,在下边的视图中,如图8-60所示展开PROFIBUS-DP下 的“SIMOVERT”,双 击“MI-CROMASTER4”,即可把MM440变频器作为从站挂在“PROFIBUS(1)”下。
其中,从站地址默认为3(见图8-61)。
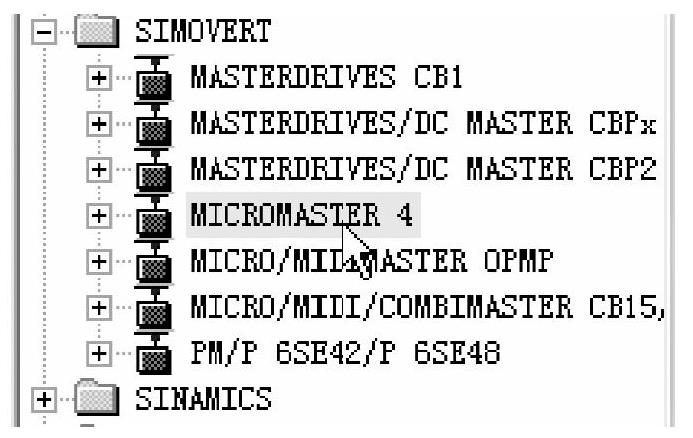
图8-60 PROFIBUS-DP网络设备
接下来就要为MM440变频器与S7-300 PLC控制器之间的PROFIBUS-DP通信选择报文结构。本实验选择PPO3报文结构,即允许S7-300 PLC以PPO3模式控制MM440变频器。
在组态的MM440上单击鼠标左键,然后在右边的视图中展开PROFIBUS-DP下的“SI-MOVERT”,展开其下的“MICROMASTER4”,双击PPO3,这样就为主从通信选择了报文结构(见图8-62)。
注意,MM440默认的报文结构是PPO3。如果选择其他报文结构,还需要重新设置相应的通信参数,如P2041等。
所有硬件组态结束后,组态硬件连接如图8-63所示。

图8-61 设置MM440的PROFIBUS地址
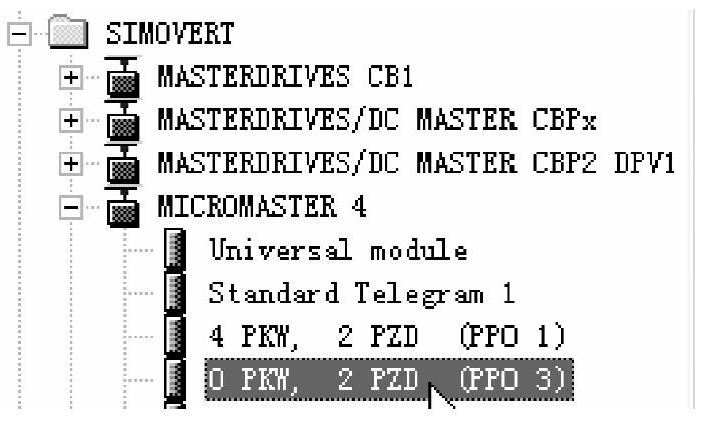
图8-62 选择报文结构
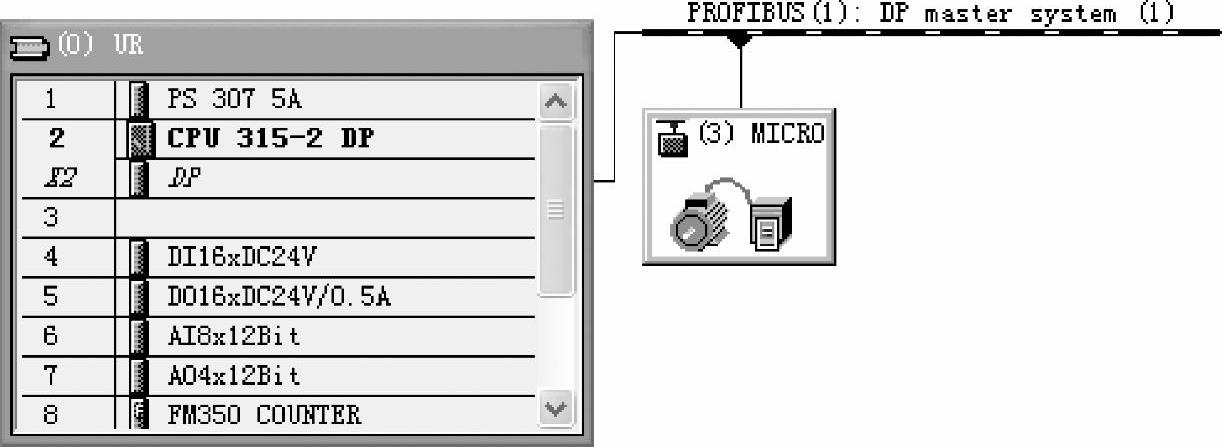
图8-63 组态硬件连接
模块的槽号、名称、型号、版本、PLC为其分配的地址以及注释均显示在下面的窗口中,如图8-64所示。
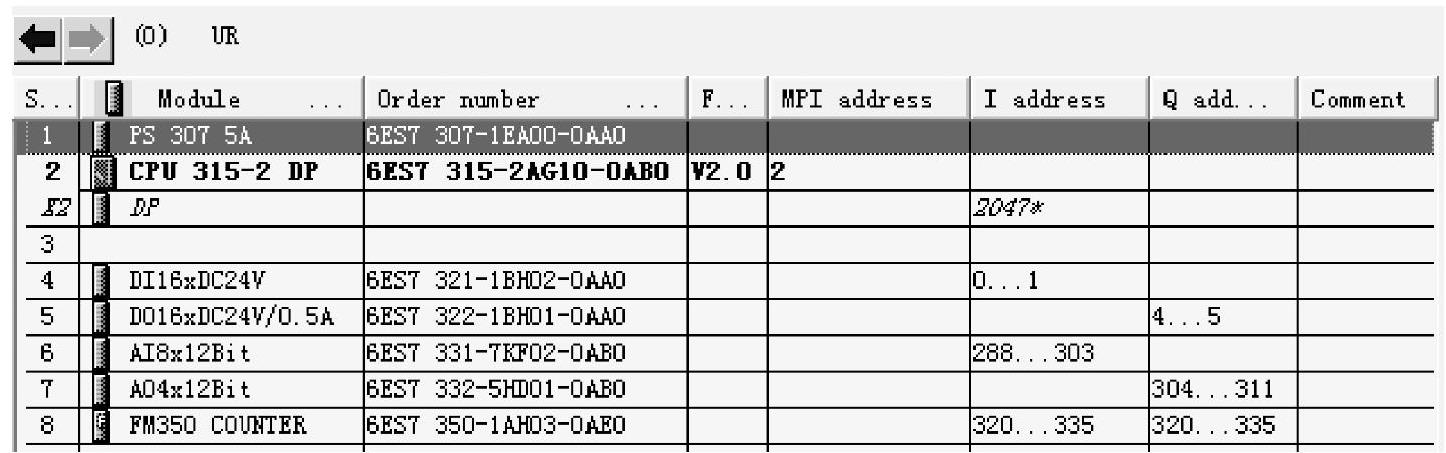
图8-64 硬件组态窗口
至此,硬件组态完毕。单击工具栏上的按钮 ,保存并编译硬件组态;单击下载按钮
,保存并编译硬件组态;单击下载按钮 ,将硬件组态下载到控制器里。
,将硬件组态下载到控制器里。
3.USS通信协议
在变频器DP现场总线控制系统中,S7-300与MM440间用户数据交换的帧主要使用的是有可变数据字段长度的帧(SD2),它分为协议头、用户数据和协议尾,如图8-65所示,其中用户数据是我们需要了解的。(https://www.xing528.com)

图8-65 通信帧的结构
用户数据结构被指定为参数过程数据对象(PPO),有的用户数据带有一个参数区域和一个过程数据区域,而有的用户数据仅由过程数据组成。变频器通信概要定义了5种PPO类型,如图8-66所示。
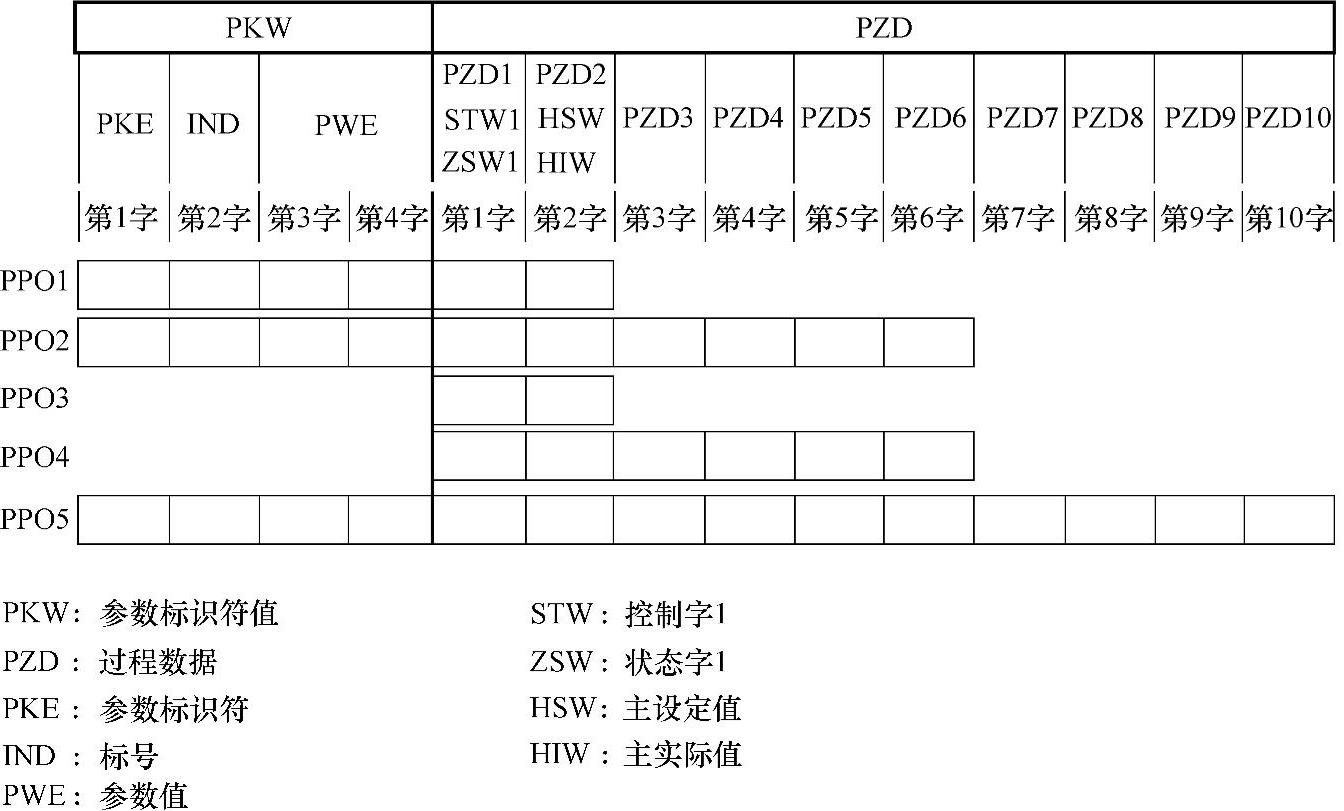
图8-66 5种PPO类型
PKW区前两个字PKE和IND的信息是关于主站请求的任务或应答报文,PKW区的第3、第4个字规定报文中要访问的变频器的参数。P2013选择可变长度模式(默认值127),主站只发送PKW区任务所必需的字数,应答报文的长度也只是需要多长就用多长,这里主站只使用4个字PKW(见图8-67)。
PKE字结构见表8-14。其中,AK标识分任务和应答模式,PNU存放要访问的变频器的参数号,当参数超过一定范围时,还以IND中数据位索引。
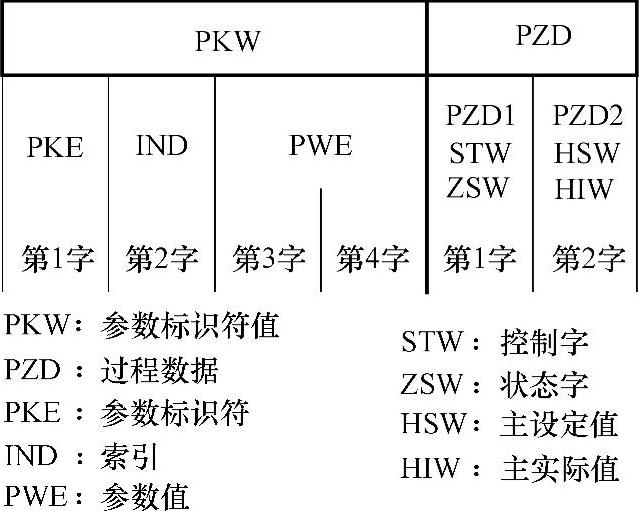
图8-67 通信帧数据格式
表8-14 PKE字结构

IND:PNU扩展以2000个参数为单位,大于等于2000则加1。下标用来索引参数下标,没有值则取0。
PWE的两个字是被访问参数的数值MICROMASTER4的参数数值,它包含有许多不同的类型,包括整数、单字长、双字长、十进制数、浮点数及下标参数,参数存储格式和P2013的设置有关,可参见变频器手册。
通信报文的PZD区是为控制和监测变频器而设计的,可通过该区写控制信息和控制频率,读状态信息和当前频率。
STW,当通过PLC对变频器写入PZD时,第1个字为变频器的控制字,其说明见表8-15。
表8-15 控制字说明

HSW,当通过PLC对变频器写入PZD时,第2个字为主设定值,即设定的变频器主频率。如果P2009设置为0,数值是以十六进制数的形式发送,如果P2009设置为1,数值是以绝对十进制数的形式发送。
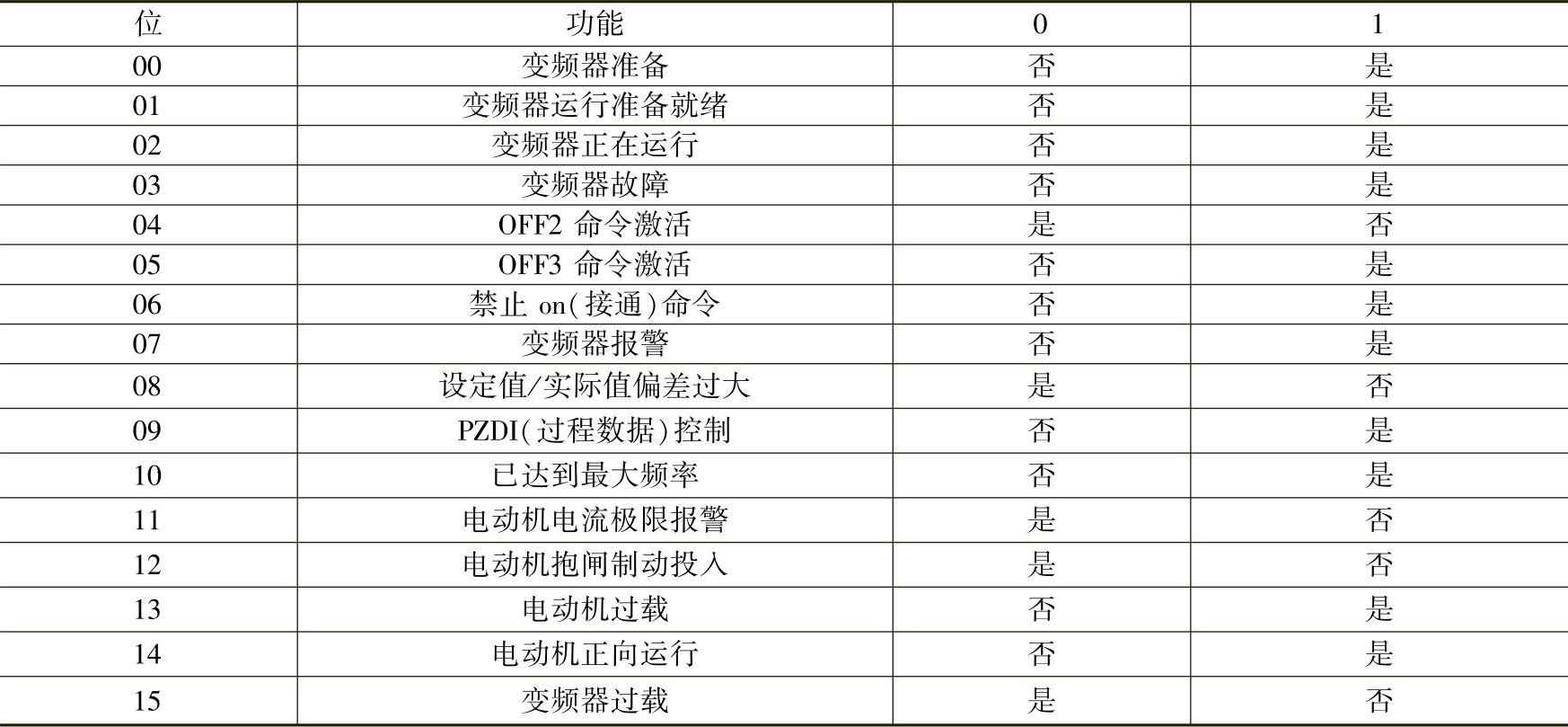
ZSW,当通过PLC读变频器PZD时,第1个字为变频器状态字,其说明见表8-16。
表8-16 状态字说明
HIW,当通过PLC对变频器写入PZD时,第2个字为运行参数实际值,通常把它定义为变频器的实际输出频率,通过P2009(如上所述)进行规格化。
举例,正向运行,频率40.00Hz:
Step1:
PLC→MICROMASTER4(请求):047E3333;
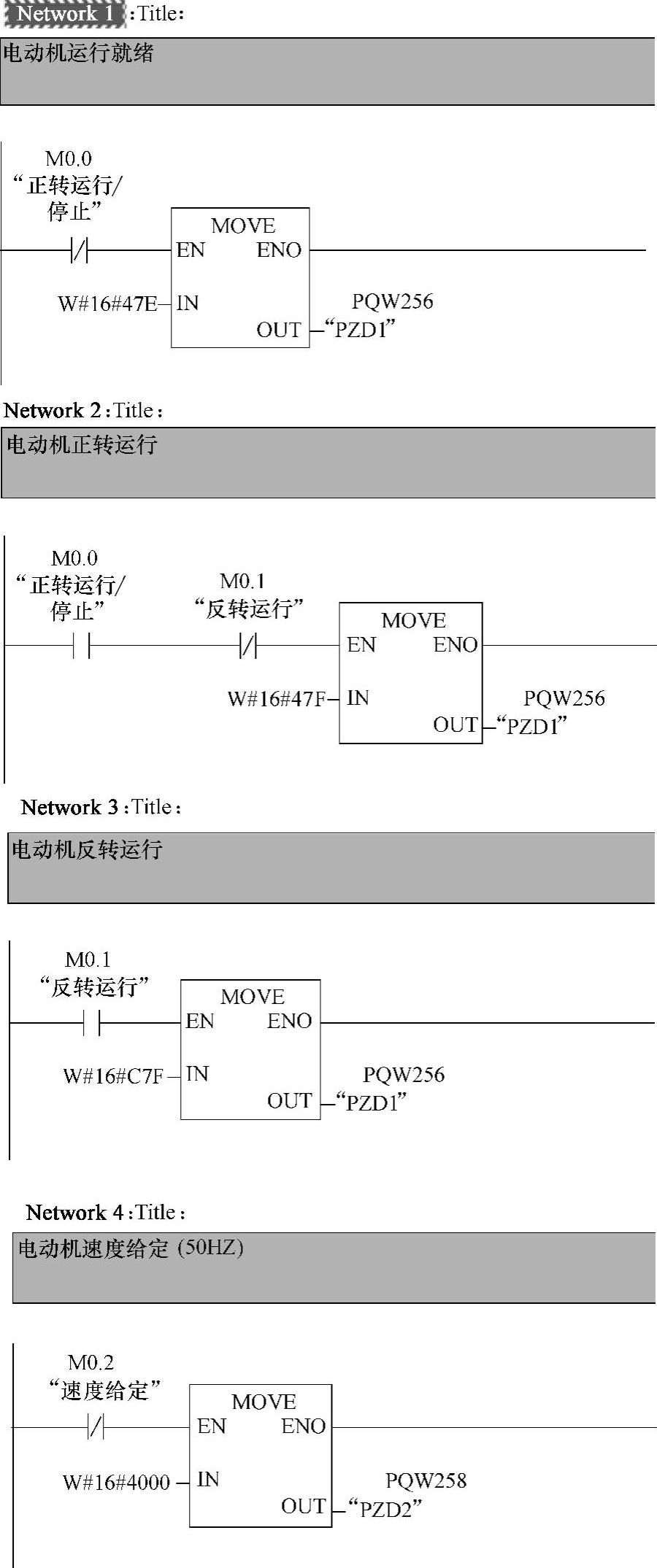
图8-68 实验程序
MICROMASTER4→PLC(应答):FB310000;
设置速度,并检测变频器是否处于准备运行状态,应答数据提示我们,当前频率状态正常,方向设置为正向,并且速度为0。
Step2:
PLC→MICROMASTER4(请求):047F3333;
发送控制命令,起动变频器控制电动机。
4.编写程序
回到管理器界面,展开左边的视图,单击“Blocks”,然后在右边弹出的文件中双击OB1,会弹出程序属性对话框,这里选择编程语言为梯形图LAD。单击“OK”后,进入到编程界面。
本实验程序如图8-68所示。
程序编制完毕,单击保存按钮,保存程序。
单击管理器菜单栏的图标 ,将硬件组态和程序下载到CPU。下载完毕后,单击上线按钮
,将硬件组态和程序下载到CPU。下载完毕后,单击上线按钮 ,进行在线控制。打开程序,单击菜单栏上的监控按钮
,进行在线控制。打开程序,单击菜单栏上的监控按钮 ,在线监控PLC。
,在线监控PLC。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。