



信号处理是漏磁场检测系统的核心部分,如何在工业现场复杂的电磁环境中获取有用的信号,去掉其中的噪声,最终实现缺陷信号的定量,关系到整个检测系统的成败。在检测中发现的缺陷信号对于整个检测过程来讲是随机的,因此缺陷信号处理从属于随机信号处理范畴,又有其独自的特点。
漏磁检测的主要噪声源有:磁化场的噪声、空间电磁噪声、电路噪声、被检测件或磁极的形状噪声。
磁化场的噪声主要是指磁化电流频率成分的不纯引起的磁化场的波动,如通过检波、整流获得的直流中残存的交流成分等。
空间电磁噪声主要是指空间的工频噪声。
被检测件或磁极的形状噪声是指试件某些形状引起的磁场的特定分布或者磁极本身引起的磁场的梯度或不均匀等。
图5.2-16是在用漏磁场方法检测轿车变速器端盖时得到一典型噪声信号,它的脉动成分是晶闸管对50Hz工频电流进行全波整流后残留的部分;被调制低频成分是被检测试件的形状噪声。图5.2-17是它的频谱。
基于对漏磁场信号的认识,上述噪声的频率和缺陷的频率交叉在一起,显然这不能用常规的滤波方法完全去除。
针对上述噪声特点,漏磁场检测系统中首先采用霍尔器件组成差动形式来提高信噪比,但是由于漏磁场信号的频率和噪声频率相互交叉,信噪比仍然很差。

图5.2-16 检测到的噪声信号
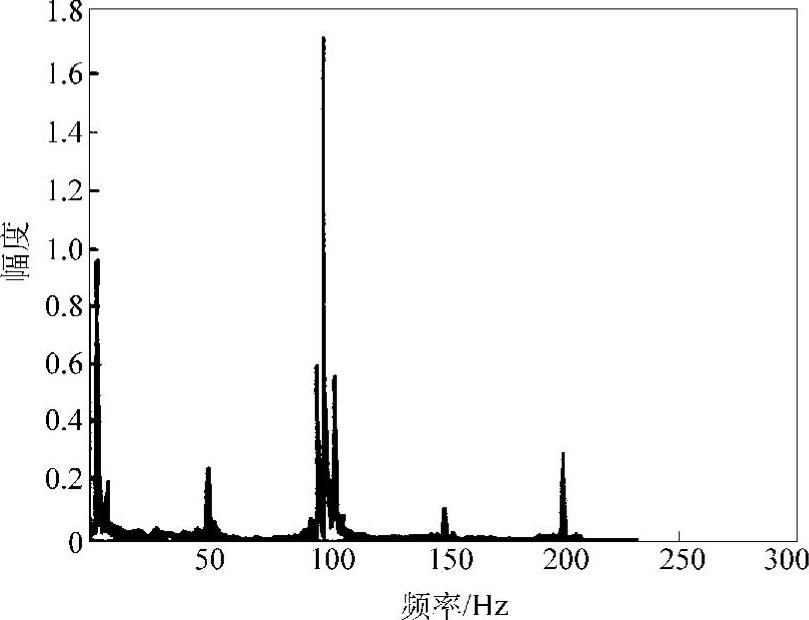
图5.2-17 噪声信号的谱线
基于计算机和数字化技术,可以用一种简单的方法降低噪声,称为“程序滤波”,它的基本原理是:
对于叠加了周期性噪声的信号,如果单就其中一个噪声频率成分而言,可简单地表示为时间域内的一个正弦信号:
N(t)=Asinωt (5.2-1)
当用噪声信号的整数倍频率来采样时,在一个时间段内其采样结果就成了一个数字序列:
N(i)i=1,2,…,n
式中 n——序列长度。(https://www.xing528.com)
假设采样频率为噪声频率的m倍,其中m为整数,这样在理想的采样条件下,对于一个标准的正弦噪声则有:
那么,采用下列处理就可完全消除这一噪声,假设处理之后的序列为N′(i):
N′(i)=N(i+m)-N(i)=0
i=1,2,…,n-m(5.2-3)
至此,就可大大降低N(i)中噪声的影响。
图5.2-18是实际的检测系统中对检测到的信号采用“程序滤波”处理后的结果。
图5.2-19是一缺陷检测信号处理前后的波形,处理的结果显示,信噪比从处理前的不足1提高到6以上。
图5.2-18 采用程序滤波后信号的处理结果
图5.2-19 缺陷信号的处理前后波形
对于数字化的漏磁场检测信号,还可以采用数字滤波、小波处理等方法。其中小波方法是一种非常有前途的处理方法,和常规的谱分析方法相比,它更适合于随机突发信号的处理,给出的信息量更大。
图5.2-20是采用小波方法处理钢丝绳检测中的一个应用实例。
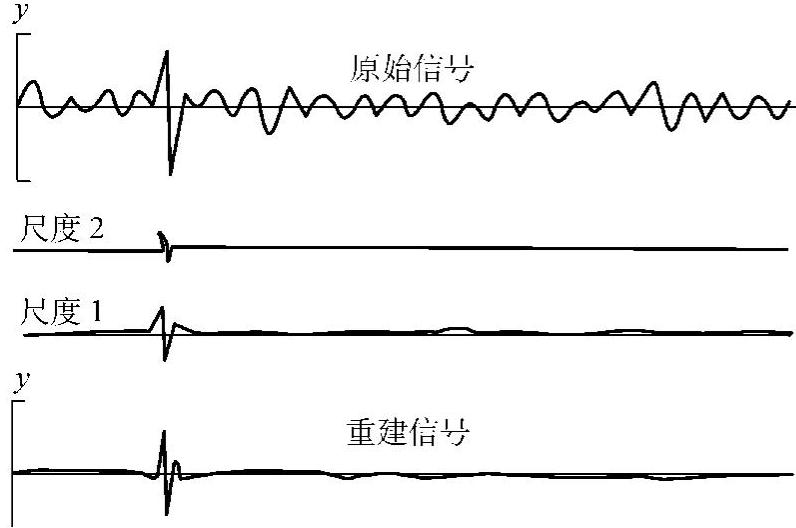
图5.2-20 钢丝绳检测信号的小波分析结果
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。