



扫描声显微镜的工作可有单声束焦平面成像、双声束成像、空间域分析、频率域分析、兰姆波检测和瑞利波检测等多种形式。
1.单声束焦平面成像
如图3.6-10所示,发射器产生的短电脉冲激励固定在透镜杆背面的压电换能器,换能器产生的近乎为平面波阵面的声波进入透镜杆在其球面透镜表面折入耦合液,进而在试样内汇聚成一窄的焦点。如果在此焦点处试样的声特性阻抗(试样中声传播速度与试样密度的乘积)有变化,就会出现反射,反射波向上传到透镜由换能器转换成电信号后被接收器所接收。通过在水平面(x-y平面)上将透镜或试样作光栅式相对移动,并在接收部分将所接收信号在一非常窄的时间窗中按幅度值以不同颜色在监视器相应位置上显示,即可形成焦平面图像,典型的工作频率范围是100~400MHz,可提供试样表面和近表面特性的高分辨力图像。当采用孔径角稍大的声透镜、工作频率范围为25~100MHz时,声束可进入试样的较深处,此时的工作方式亦称C型扫描声显微术(C-SAM)。焦平面成像利用的是单一的超声纵波,所用声透镜的孔径角不能太大,以避免在试样表面激励出瑞利波引起干扰。
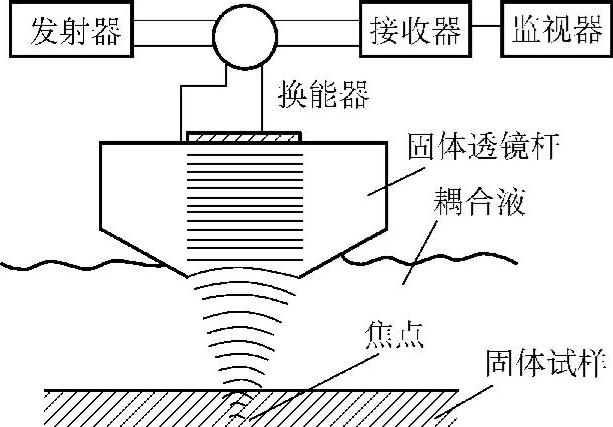
图3.6-10 SAM的焦平面成像示意图
扫描声显微镜性能评价要素之一是分辨力,对于球面聚焦声束,如图3.6-11所示,聚焦区的方位分辨力(Δr)和深度分辨力(ΔL)可表示为
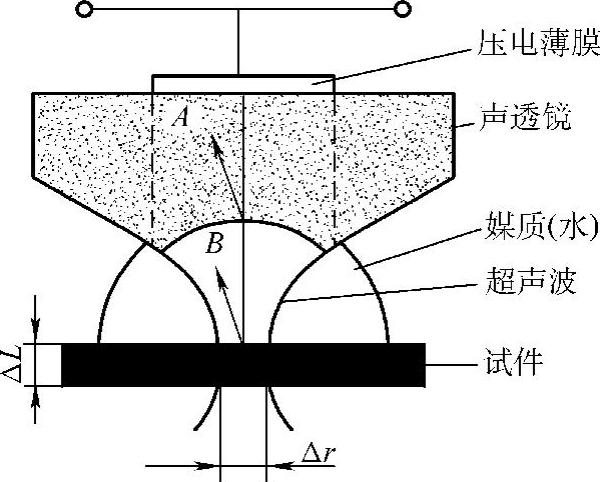
图3.6-11 声透镜分辨力的定义
Δr=λF
ΔL=2λF2
式中 λ——声在介质中的波长;
F——声透镜的f数(透镜焦距与入口直径之比)。
工作频率f=1GHz,水中声波波长为1.5μm,对于F=0.7的声透镜,Δr=1μm而ΔL=1.5μm,可见以幅度方式工作时,深度分辨力要低于方位分辨力。
为了提高深度分辨力,研究出了干涉法,即将从试样反射的超声束(图3.6-11中的声束B)与另一参考超声束(例如图3.6-11中声透镜与水界面处的反射波A)相干涉。采用这种干涉方式,可使ΔL比Δr改善5倍,在f=1GHz、F=0.7的上述情况下,幅度方式ΔL为1.5μm,而干涉方式可达0.3μm。
2.双声束成像
上述单声束焦平面成像所形成图像的对比度主要由所接收声信号的幅度决定,相位的信息被丢失,而双声束成像则既可获得幅度也可获得相位信息。图3.6-12表示一双声束声透镜,在透镜杆的后面有两个倾斜面,倾角是非常小的,两个面上各有一氧化锌换能器,杆的对面有一球面用做声透镜。两换能器由分开的相干脉冲激励,两声束由杆向下相互交叉,在通过耦合剂后被聚焦在试样的两相邻点,两点之间的距离部分地确定了分辨力。在从试样反射后,回波被换能器接收。一种工作方式是这两回波被作电子学的相减和放大以得到幅度差的输出;另一种工作方式是将所接收的信号通过相敏探测器以得到相位差的输出。对试样作光栅式扫描,根据所选工作方式可得幅度差图像或相位差图像。此法的优点之一是两焦点之间反射率的微小差异可被放大和成像,工作频率近乎1GHz时,分辨力接近1μm。

图3.6-12 双声束声透镜的示意图
3.空间域分析(V(Z)曲线)
参阅图3.6-13,使用孔径角大的声透镜。设透镜在水中先处于使其焦点落在试样的表面的位置(此时Z=0),当透镜的位置沿与试样的公共法线下移(试样表面上升)时,记录压电换能器的输出电压幅度V,即可得到在该超声各频率下的V(Z)曲线。图3.6-14为从玻璃上所获得的V(Z)曲线;图3.6-15则是在表面力学性能不同的试样上所得结果,图a、图b为声速不同的两种材料的V(Z)曲线比较,图a、图c为声速相同衰减不同的两种材料的V(Z)曲线比较,图d则是图a的干涉方式。

图3.6-13 确定V(Z)曲线的示意图

图3.6-14 从玻璃上所获得的V(Z)曲线频率f=30MHz

图3.6-15 表面力学性能不同的试样的V(Z)表征
cl—纵波声速 ct—横波声速 α—衰减值
研究已经表明,V(Z)曲线的这种周期性波动起源于镜面反射场(图3.6-13)中的A声线和在液固界面处激起的瑞利波的泄漏场(图3.6-13中的B声线)之间的干涉。周期ΔZ可给出为
式中 f——超声频率;
cW——超声在水中速度;(https://www.xing528.com)
θR——对于特定的液-固界面的瑞利波入射角。
基于上述方程,由试验获得ΔZ,即可计算出瑞利波的相速度cR,进而可对材料表面的弹性作出表征。

当所用声透镜为球面聚焦透镜时,球面系统在垂直透镜轴的试样平表面内向所有方向发射瑞利波,所测得的性能是围绕z轴的平均值。对于圆柱形聚焦声透镜,可得直线形聚焦束,如图3.6-16所示,这就有可能选择一特定的传播方向并记录各向异性数据,这对残余应力的测量、晶体各向异性的测量是重要的。
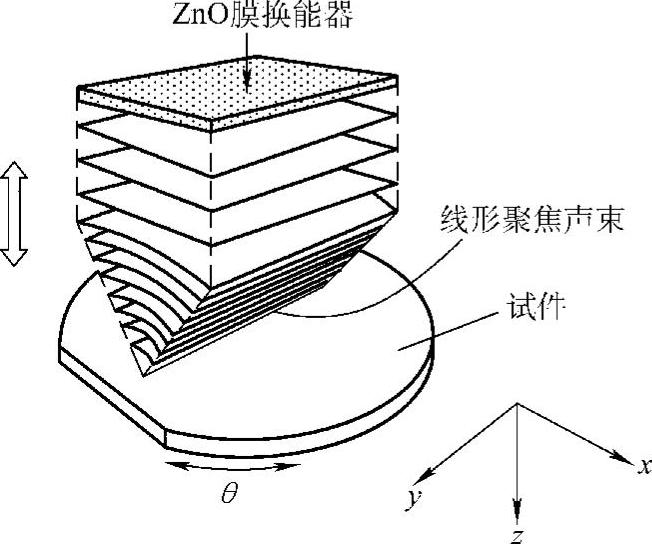
图3.6-16 直线形聚焦声束
4.频率域分析(V(f)曲线)
当用一球面声透镜聚焦超声束时,换能器输出V和材料弹性之间的关系可给出为

式中 R(θ,ϕ)——试样的反射率函数;
P(θ)——球面透镜瞳孔函数,而孔径是用最大角α来表征的;
z——散焦距离;
k——在声速为c的耦合液中超声波的波数, f。可见频率f和z起着相同的作用,从而可以得出下式
f。可见频率f和z起着相同的作用,从而可以得出下式
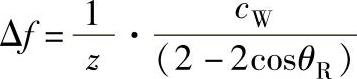
图3.6-17为在玻璃上所得V(f)曲线。
用固定散焦距离z而改变超声工作频率完成分析可有某些优点,事实上,改变z要求系统有机械的移位,有时可构成信号的噪声源;此外,改变z可使试样上被研究区的尺寸变化,非均匀性就可能引入检测区,这可使换能器的输出不再能单一地表征表面的局部性能。
5.兰姆波检测
一个普通的球聚焦声透镜扫描声显微镜在多层介质或板中可产生很多模式的泄漏波,只要这些模式的激励角落在透镜的孔径角范围内。很多模的同时出现可使声信号变得杂乱而难以检测。采用图3.6-18所示的兰姆波透镜,通过一固定的入射角使仅激励一种模式的声波成为可能,因为某一单层材料激励某一模式的临界角与频率有关,通过选择与此给定入射角相匹配的频率即可选择性地激励起该模式。由于大多数入射声线均处于此临界角,模转换的效率要比普通球面声透镜高得多。这种透镜中间平部分所发射的声波垂直入射到试样表面并返回透镜,可用以提供参考项。由兰姆波声透镜所得的独特的V(f)曲线,所激发各模式的波在曲线上以峰值形式显示,此频率与各层的弹性常数、界面结合质量等有关,V(f)曲线上峰值的位置对这些参量是非常敏感的。

图3.6-17 散焦距离z=-1mm时玻璃的V(f)曲线
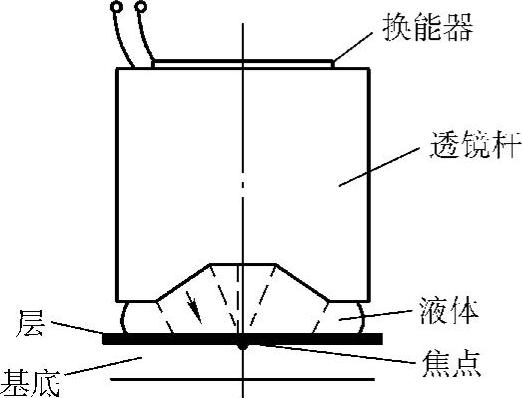
图3.6-18 兰姆波声透镜的几何形状
6.瑞利波检测
如图3.6-19所示,出自压电换能器1左侧的声线到达声透镜2的左侧经折射可以以瑞利波临界角θR与试件3表面左侧相交,换能器是圆的,声线会聚圆锥与试件表面相交形成一直径为DR的入射圆。入射纵波通过模式转换成为瑞利波沿圆的直径方向穿过试件到达试件3表面右侧在该处再经模式转换成纵波,经透镜2的右侧到达压电换能器1右侧。
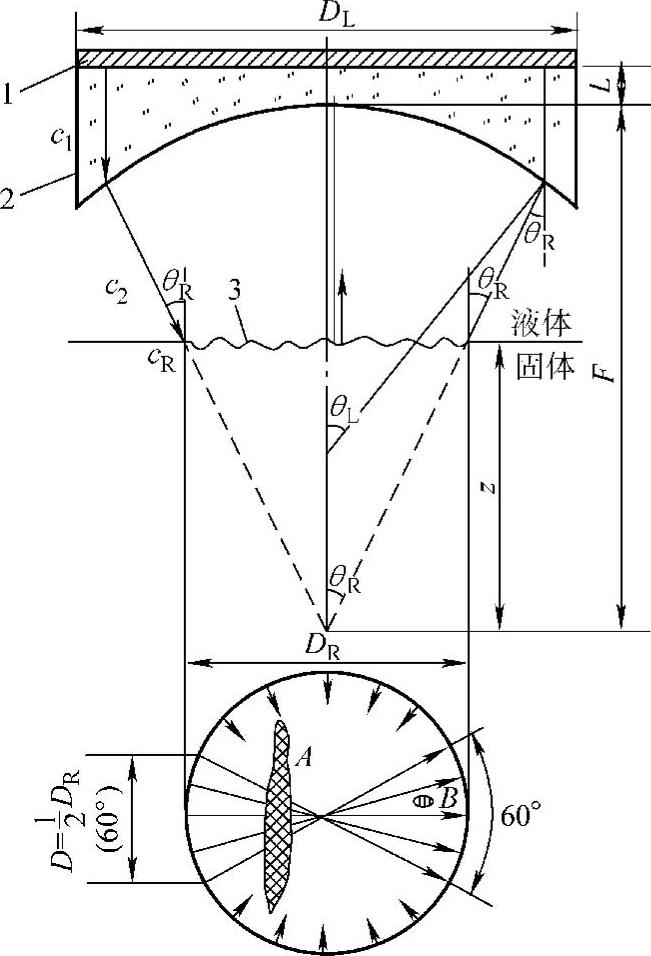
图3.6-19 瑞利波检测
设透镜中心处厚度为L,透镜曲率半径为K,在轴线上的焦距为F,在轴线距离z处散焦,c1和c2分别为在透镜和在耦合液中的声速,而θL、θR和cR分别为透镜角、瑞利波入射角和瑞利波速度,入射声线转换成瑞利波的入射圆直径为DR,则在透镜轴线上的声线从压电换能器到试件表面并返回所需的时间t1与以瑞利波临界角入射的声线往返一次所经历时间t2之间的差可给出为
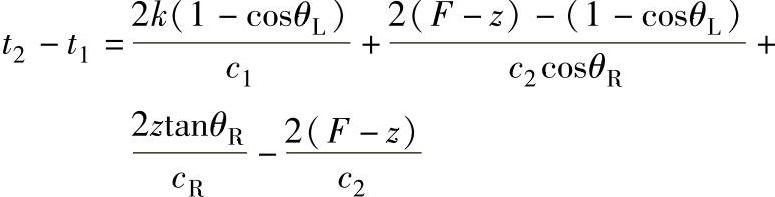
在声速为已知的情况下,调定信号脉冲长度给定(t2-t1),即可解出所需的散焦(F-z)。
在试件表面上,可使任何瑞利波声线汇聚束阻断、改变方向或改变幅度的任何缺陷,均将改变为压电换能器所接收到的信号幅度。图3.6-19中的缺陷A只要进入入射圆就将阻断相当多的瑞利波,从而使接收信号有大幅度的下降;而缺陷B除非处于中心,信号幅度的下降将会是较小的。由于声线从入射圆周边作360°汇聚收敛,对于任何截断表面的裂纹,不论其取向如何均可得到相同的幅度下降,从而可以以相同的概率检出任何取向的任何表面裂纹。对于受高应力的表面,这种能力是特别重要的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。