



1.液面声全息
液面全息的基本形式如图3.4-1所示,它由声学系统和光学系统两部组成。
(1)声学系统声学系统主要由同一振荡器激励的两个独立的超声波换能器组成。两个换能器与被测工件一起浸于盛水槽中,分别提供物体声束和参考声束,通常采用脉冲工作方式。两换能器的作用和要求见表3.4-3。
在工业系统中,对物体声束的实用范围为:
声波频率:1~10MHz。
脉冲持续时间:50~300μs。
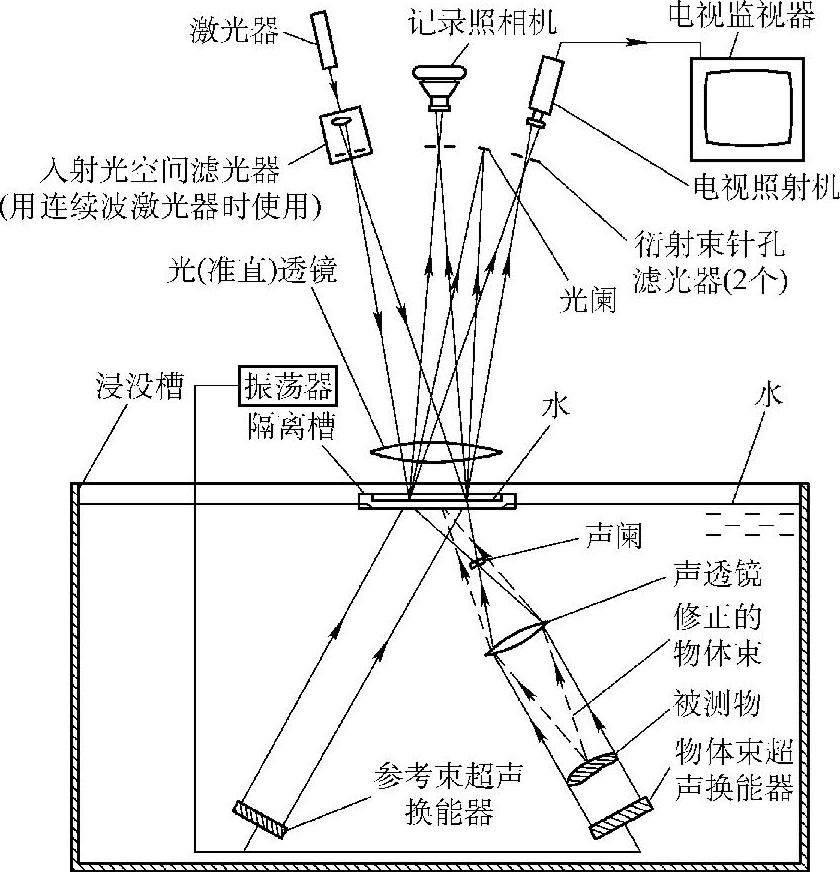
图3-4-1 液面声全息系统的基本形式
脉冲重复频率:60~100s-1。
声学系统的布置必须注意:
1)两换能器应指向液面的同一区域,使它们的声束在液面互相叠加。声束干涉产生的静止涟波图,相当于一幅轮廓鲜明的全息图。
2)调节脉冲参考声束到达液面的时间,以补偿物体声束通过被测件时所引起的到达液面时间的任何变化,从而保证两声束准确地在同一瞬间到达液面的成像区。
3)在水浸槽的成像区设置一充水隔离槽,以防止环境的振动影响全息图的形成。
4)在物体声束的声径中设一声透镜,以便将被测件的图像聚焦在成像区的液面上。
5)在物体声束声透镜的焦点处放一用声阻抗很高材料制成的小圆盘声阑,以防止未被工件改变的物体声束(无被测工件信息)到达液面成像区。
使用脉冲超声波束的优点见表3.4-4。
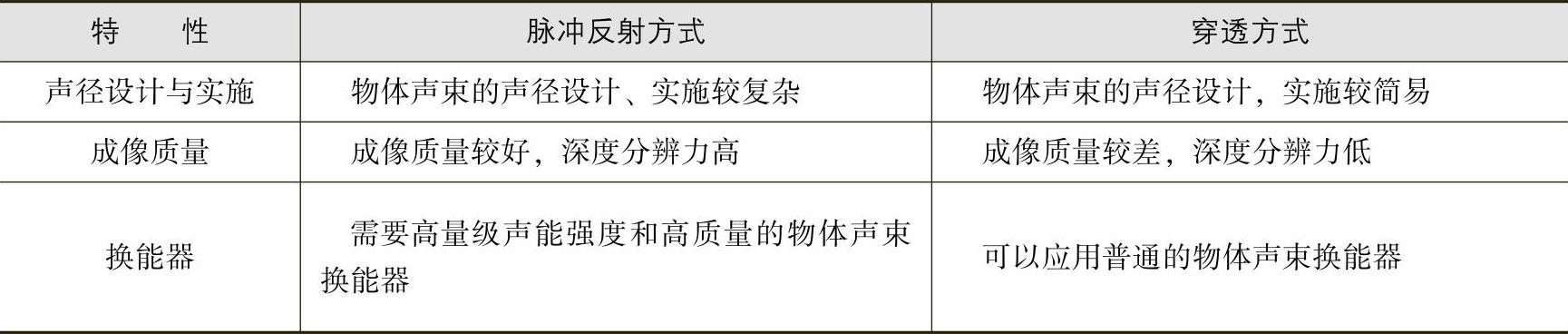
利用穿透方式或反射方式都可成像,其特性优劣的比较见表3.4-5。
表3.4-3 液面声全息两换能器的作用和要求
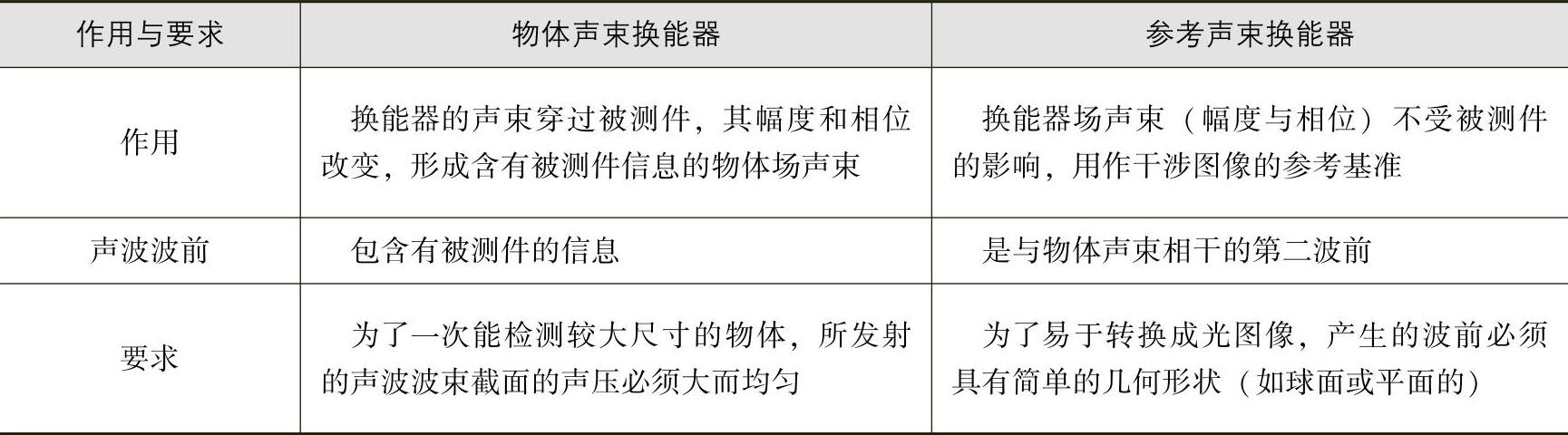
表3.4-4 脉冲超声波束与连续波超声波束比较

表3.4-5 脉冲反射成像与穿透成像的比较
(2)光学系统在液面声全息中,液面涟波形成的全息图可直接用作光栅,以衍射入射的激光,借助该全息图反射的相干光便可观察超声波图像,因而是实时的。
光学系统的布置应遵循下列准则:
1)用激光器产生的光束照射涟波图,在照射之前,光束通过一光学系统。当采用脉冲激光时,脉冲周期应与超声波的脉冲周期一致,使成像液面在涟波图稳定时才被照明。
2)当采用连续波激光时,光束应通过一空间滤波器,以改善照射到成像液面光束的模式。
3)在反射光的光径中,设置光学准直透镜和针孔光阑滤波器,把反射光聚焦到光阑平面上,除一阶衍射光点外所有其他光都被挡住,使显示图像清晰。
(3)声和光的相互作用液面声全息的图像是用波长比声波短得多的相干光束观测的。为了用全息图来增加光的衍射角,通常将图像尺寸减小到m分之一,也就是比原件小。这样做的结果相当于超声波长也减小到m分之一。
由于光波和声波的波长不一致,在声波与光波的转换过程中,观察到的图像必然会有畸变和深度上的失真。
对于一个位于Z轴的目标,该目标同X轴重合的全息照相平面的距离为z0,如图3.4-2所示。从目标上的一点x0传来的射线与Z轴成α角,且与X轴相交于x1。这样,出现在全息图上的波的传播为
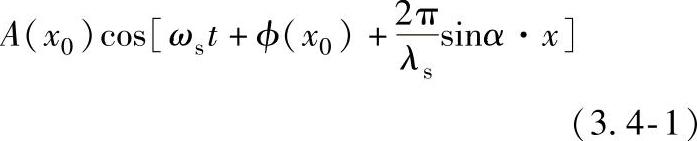
式中 A(x0)——声线的幅度;
ϕ(x0)——声线对某一基准的相位;
ωs——超声波角频率;
λs——超声波波长;
t——时间。
同样,在整个全息照相平面上,平面参考波束以与Z轴成θ角的方向传播,并表现为

式(3.4-2)中,假设波束为单位幅度。若在全息照相平面中以某种方法将这两个波相乘,便可得到

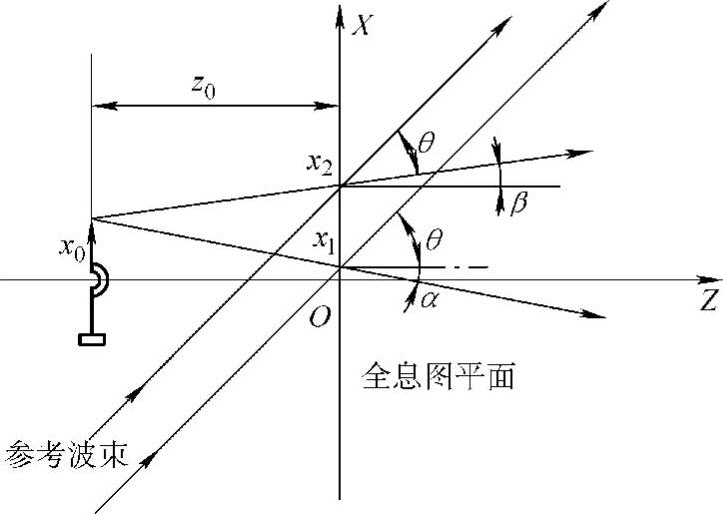
图3.4-2 利用平面参考波率的全息图的形成

式(3.4-3)已经省去二次谐波项,式中所包含的即为声全息信息。假定照射光束是平面的(近似于实际情况),且垂直于全息图的平面(见图3.4-3),那么照射束的幅度即与全息图所记录的强度图案相乘。从射线的角度考虑,全息图出现的波前可用cosωt乘以式(3.4-3)而得到(假定此时图像已缩小到m分之一):
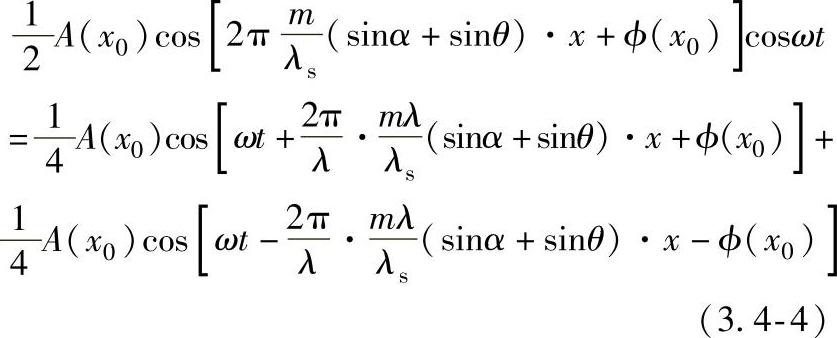
式中 ω——光的角频率;
λ——光的波长。
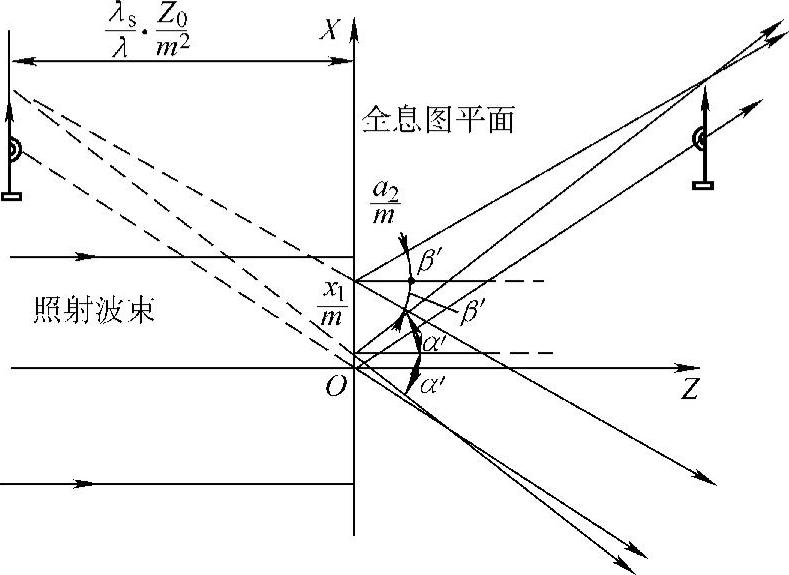
图3.4-3 平面照射声束全息图成像原理
所产生的波前由两种射线组成。一种在Z轴的下方倾斜一个α′角,此处为

另一种同样大小的射线在Z轴上方。所有的射线都属于这种情况,如图3.4-2所示,对于在Z轴上倾斜β角的射线来说,全息图产生的波前由倾角为β′的两种射线组成,此处为

如果用这种方法获得图像,必须作小角度假设,即(https://www.xing528.com)
α=sinα (3.4-7)
则有

这种情况的射线示意图形如图3.4-3所示。由此可见,全息图已经记录有两个图像:一个是与目标相同的虚像,其尺寸已减小到m分之一,与全息图的距离为 ;另一个是大小相同,而与全息图的距离也相同的实像,但凸出部位变成凹陷部位,即所谓幻视现象。如果射线是按式(3.4-5)而不是按式(3.4-8)画出,除非遇到式(3.4-9)成立
;另一个是大小相同,而与全息图的距离也相同的实像,但凸出部位变成凹陷部位,即所谓幻视现象。如果射线是按式(3.4-5)而不是按式(3.4-8)画出,除非遇到式(3.4-9)成立

否则,全息图的图像会有畸变。通常 ,m的实际值约为4~12,而从目标来的射线的声角小于30°,此时畸变一般可以忽略。此外,在具备这些数值的条件下,所需图像在深度上会有所延伸,这称之为深度失真。根据式(3.4-8)和图3.4-3
,m的实际值约为4~12,而从目标来的射线的声角小于30°,此时畸变一般可以忽略。此外,在具备这些数值的条件下,所需图像在深度上会有所延伸,这称之为深度失真。根据式(3.4-8)和图3.4-3
可以计算出这一深度失真值为 。除实际的考虑外,为使畸变和失真达到最小,只要观察方便,全息图缩得越小越好。倘若随后用透镜系统放大图像,深度失真便重新增大。
。除实际的考虑外,为使畸变和失真达到最小,只要观察方便,全息图缩得越小越好。倘若随后用透镜系统放大图像,深度失真便重新增大。
(4)对被检工件的限制在任何瞬间,能完全成像的被检工件的大小均受到物体束换能器尺寸和透镜尺寸的限制(典型的最大直径为152mm)。对于大的被检件,必须采用大尺寸的物体束换能器和透镜,否则,必须将被检工件逐步移过物体束,分段成像。窄的物体可以在一个方向上移动;宽的物体则需在两个方向上移动;大而厚的物体为检测整个体积,则需要沿透镜轴及其他两轴作三维移动。这是因为在任何瞬间,物体只有一薄的区段处于透镜的物面中而可成像。液面声全息的某些典型的检测性能见表3.4-6。
表3.4-6 液面声全息的典型检测性能
图3.4-4 检测条带产品的液面声全息系统声学部分简图
(5)灵敏度与分辨力液面系统的灵敏度通常由液面上产生的涟波图决定。典型系统可测得的最小超声波束强度约为10~10-2W/m2。
液面声全息所能分辨的细节,可根据超声波透镜的焦距、线性孔径和超声波束波长按下式确定
Δx=1.22λs/(f/a) (3.4-10)
Δz=2λs/(f/a)2 (3.4-11)
式中 Δx——在工件检测平面内的分辨力(即横向分辨力);
Δz——垂直于工作检测平面的分辨力(即深度分辨力);
λs——液体中的超声波波长;
f——液体中的超声波透镜焦距;
a——超声波透镜的线性孔径;
f/a——超声波透镜焦距为f时的光阑数。
采用f/3透镜和5MHz频率检测钢或铝工件的缺陷,横向分辨力约为1mm;深度分辨力约为5mm。
(6)液面声全息装置工业用液面声全息系统简图如图3.4-5所示。该系统由工件水槽和转换水槽组成,相互之间用吸声低的振动阻尼薄膜制造的声窗连接。被检物置于工件槽内,可被自由操作而不致干扰全息图的形成。全息图在转换槽水面的隔离槽内形成,消除了液流和振动的影响,系统抗振稳定性好。
图3.4-5 工业用液面声全息系统简图
在该系统中,从被检工件来的超声波借助超声波透镜系统穿过薄膜,经声反射镜反射,然后通过能穿透超声波的隔离水槽底到达成像液面。参考波束从分立的换能器获得,通过隔离水槽的底直接到达成像液面。图像是在光阑遮挡住不需要部分之后,借助全息发射激光器的光束观察的。与两个换能器直接有关的有效物体场的标准尺寸为直径114mm;检测大于该尺寸的工件,则需将工件移过物体场。典型的物体束换能器直径是127mm,其声束特性见表3.4-7。
表3.4-7 实用物体束换能器声束特性
由于成像槽必须水平,光学系统又必须相应地对准,加之系统大而重,因此基本上为固定式。典型设备的尺寸如图3.4-6所示,所用声学和光学系统如图3.4-5所示,质量约450kg。
为满足特殊应用要求,已设计了专用设备。图3.4-7所示为专门设计用于金属带材检测的另一种类型液面装置。它利用进出口水封的方法,连续移动带材通过水浸槽。该设备的尺寸如图3.4-8所示。
该装置超声波工作频率为3~5MHz,亦可应用1~9MHz。设备不受机械振动或静电干扰的影响。
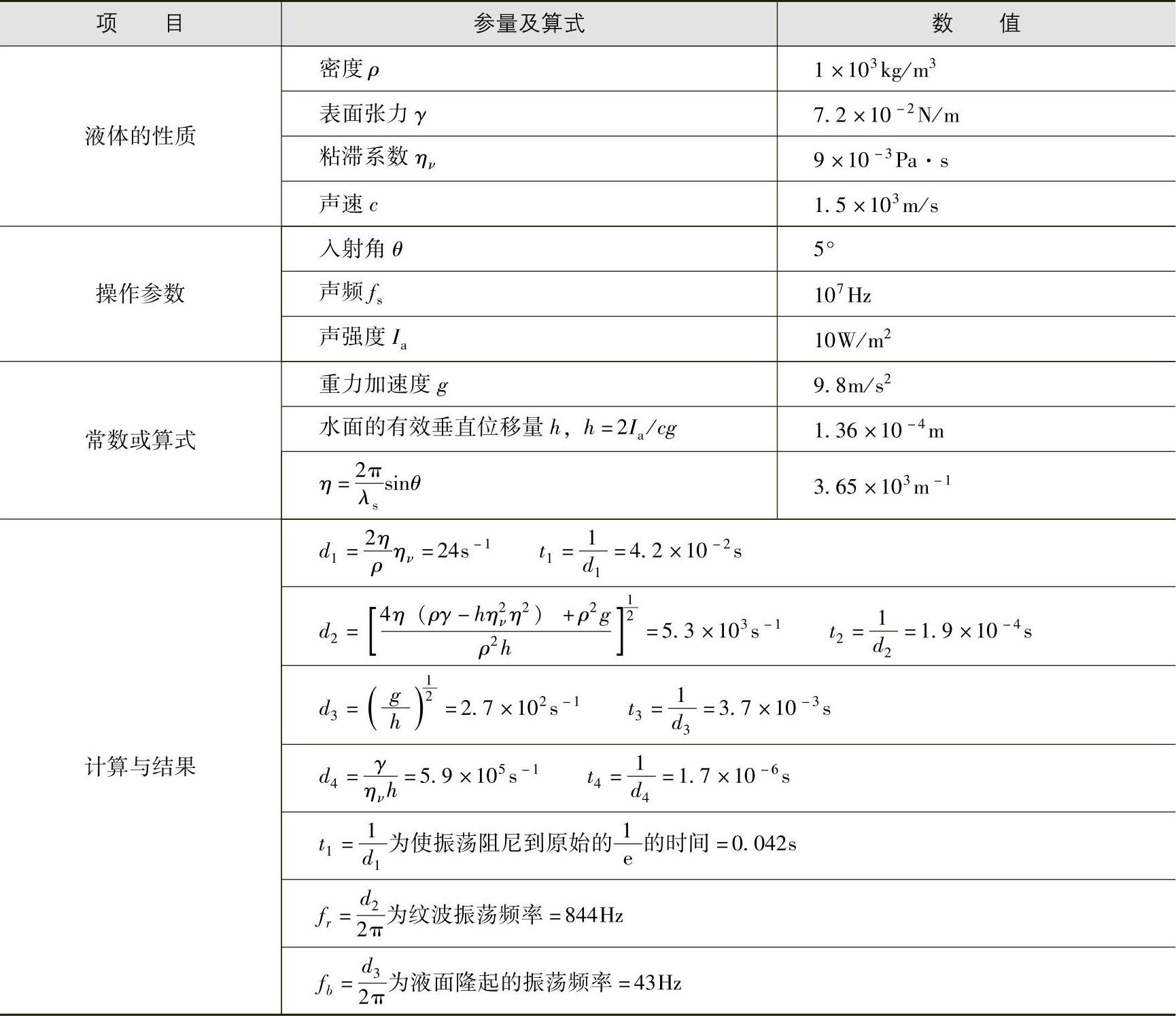
在25℃的水中,液面声全息的某些典型参数见表3.4-8。
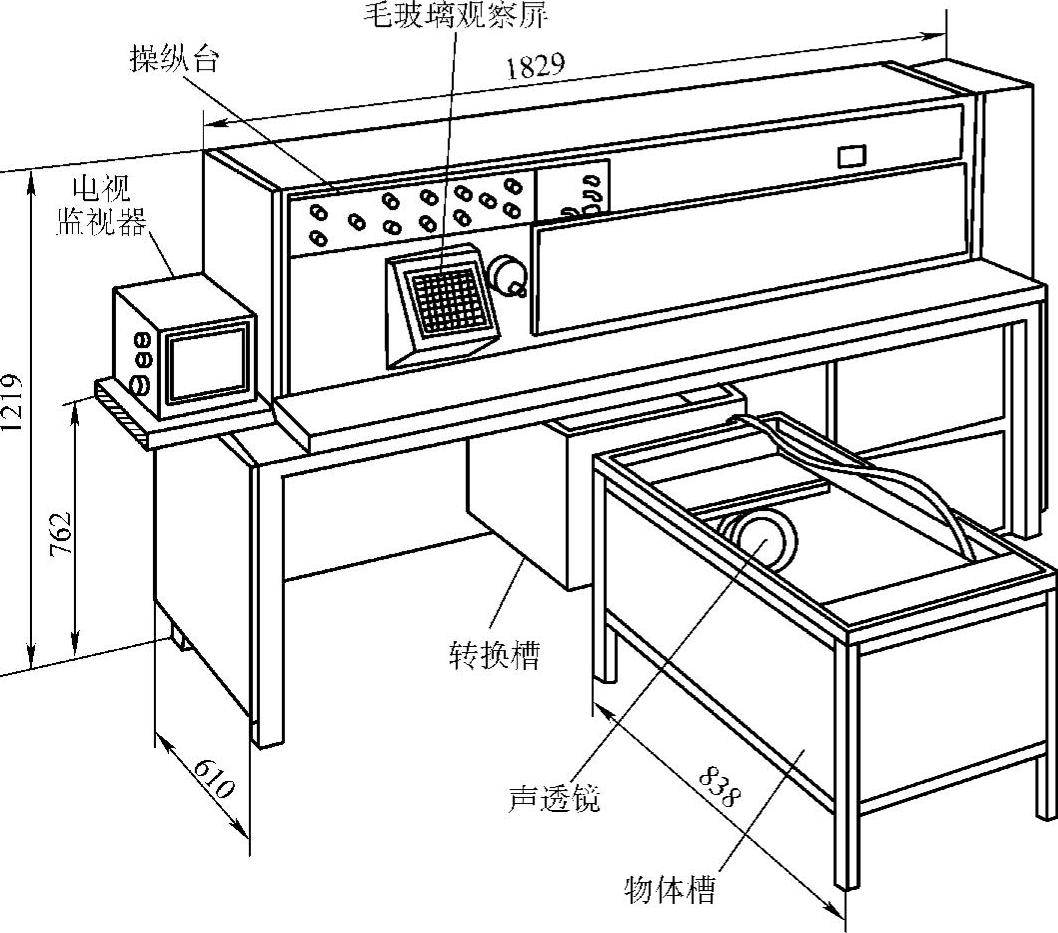
图3.4-6 检测小金属件的工业用液面全息装置
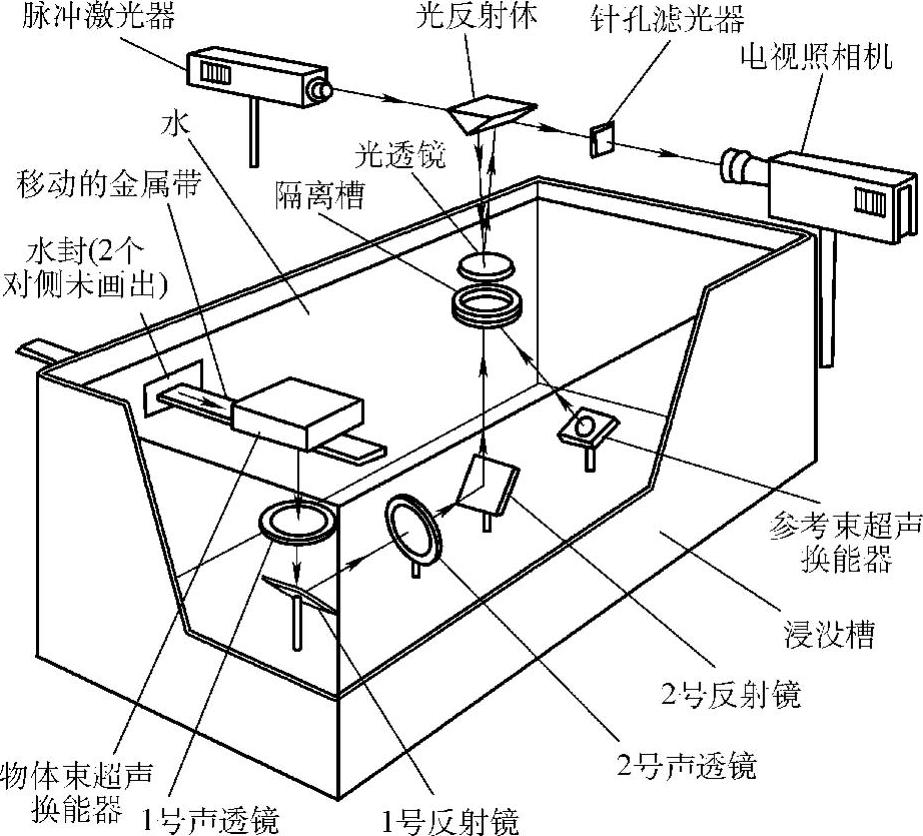
图3.4-7 检测连续移动金属带的液面声全息装置的声、光系统简图
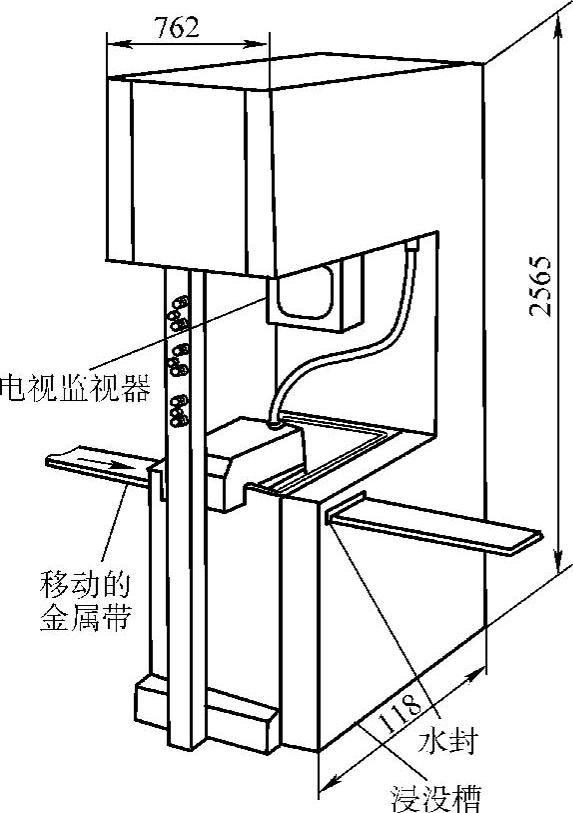
图3.4-8 检测连续移动金属带的工业用液面声全息装置
表3.4-8 液面声全息在25℃水中的某些参数
2.其他光学模拟装置
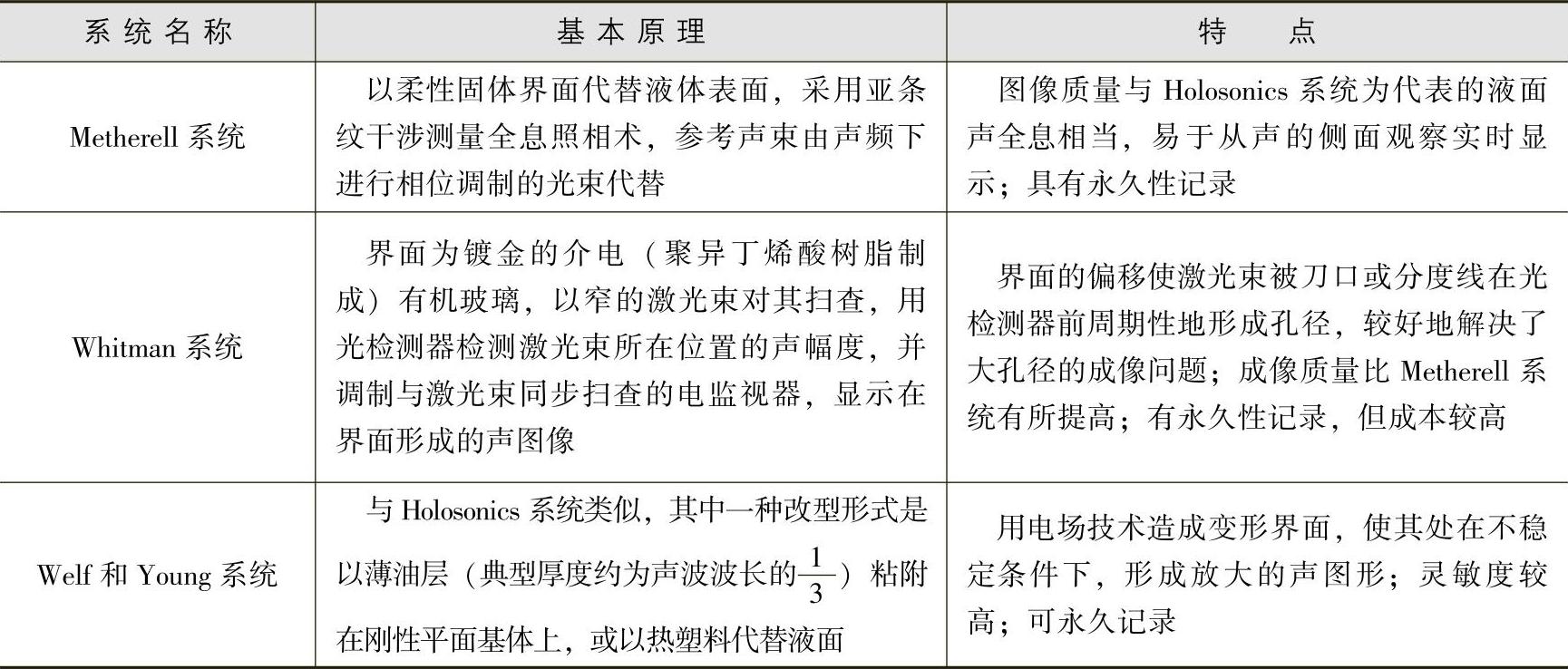
(1)其他可动界面可替代液体表面声全息系统的,较为成熟且实用效果较好的其他可动界面见表3.4-9。
表3.4-9 几种实用的可动界面系统
(2)粒子室粒子室又称为Pohlman室,可用于实时超声波观察。主要由两平板之间的二甲苯内铝粒子的近胶态悬浮体构成。两平板中的一块用以透声,另一块作为光的观察窗。粒子室如果灵敏,其响应时间很慢。表3.4-10示出了不同溶液中悬浮铝560粉末的粒子室响应时间。响应时间是指被检工件移动停止以后,形成全息图像所需的时间。从表3.4-10可以看出,偶极距对粘滞系数的比值越小,响应时间越长。
表3.4-10 在不同溶液中悬浮铝560粉末的粒子室响应时间

为了解决响应时间过长的问题,Cunnigham和Cuatre设计了一种改进型粒子室,它是悬浮于水中的,由直径1μm聚苯乙烯球构成的厚为20μm的薄膜装置。
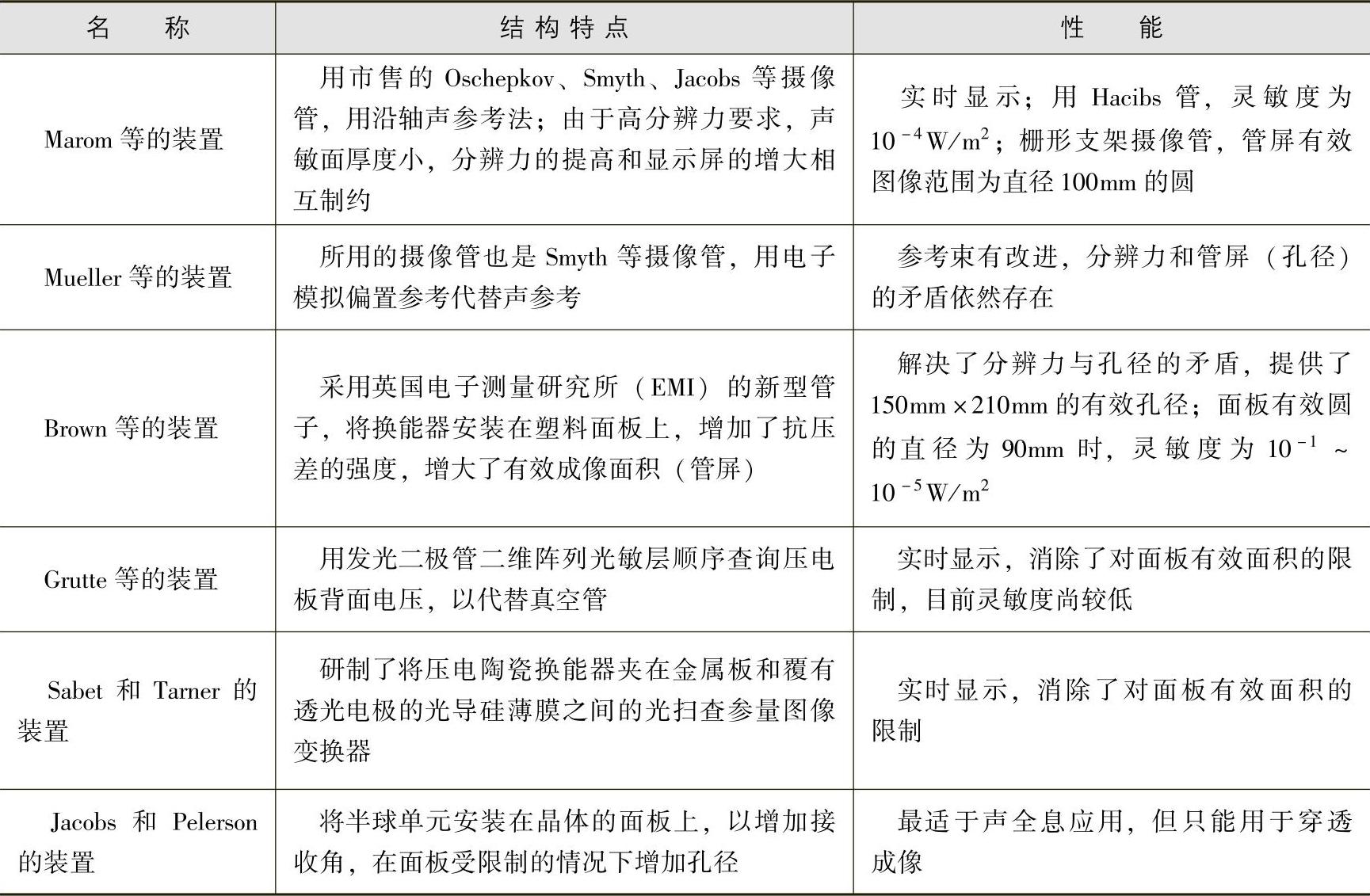
(3)超声波摄像装置超声波摄像装置相当于电视系统的正摄像管,只是将光敏面改为声敏面,通常用“半波长厚度”的压电材料制成(多用石英谐振晶片,也可用钛酸钡或锆钛酸铅)。声场把振荡应力施加于压电面板,并用电子束对此面板的背面扫查,产生的二次发射逐点地被该点的声场调制,收集这些二次发射电子,用其电流来调制与摄像装置电子束同步的示波管光点的强度。这样,示波管显示的就是摄像装置面板上的声强度变化的可见像了。已用于声全息照相的摄像装置见表3.4-11。
(4)照相底片法照相底片记录声全息图是全息应用于声成像技术中的方法之一。其工作原理是:在显影前和显影期间,用超声波激励照相乳胶可提高底片的感光灵敏度。因此,如果声场出现空间强度变化,乳胶受到最大激励的部位会比其他部位显影得快,从而在底片显影后会显现出全息图。处理后的胶片,当声强为5×103W/m2时,曝光时间只需30~50s。
用照相乳胶记录超声波的其他方法还有在显影或定影时用声激励浸于含碘溶液中涂过淀粉的片子。表3.4-15总结了这些方法的相对效率。
表3.4-11 几种实用摄像装置
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。