



1.源定位类型
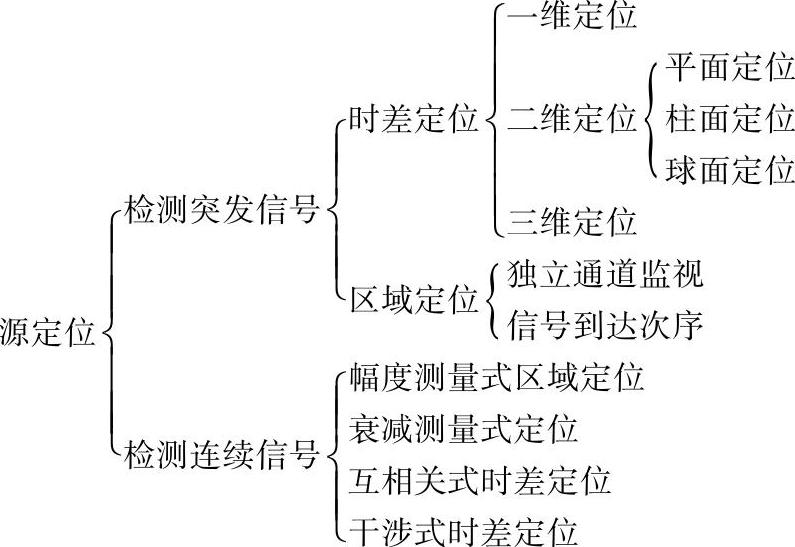
源定位是声发射检测的主要目的之一,也是声发射检测系统的主要功能之一。源定位是指在被检件表面将一个或多个传感器按照一定的几何关系布置成传感器阵列,利用声发射应力波到达阵列中各传感器的时序特征对声发射源位置进行估算的一种声发射检测技术。根据需要检测的不同声发射信号类型,声发射源定位具体分类见表3.1-8。
表3.1-8 源定位分类
2.区域定位
区域定位是一种处理速度快、简便而又粗略的定位方式,主要用于复合材料等由于声发射频度过高或传播衰减过大或检测通道数有限等难以采用时差定位的场合。区域定位的区域是指所确定的声发射不是一个点而是一个有一定体积的区域,通常这个区域是以某个传感器为中心的圆形范围。区域定位一般包括如下两种方式,其原理如图3.1-16所示。
(1)独立通道监视方式独立通道监视方式的区域定位是指在传感器阵列中按照信号衰减的规律,以任一传感器为中心画出该传感器的可接收信号范围,这样就将被检件分成若干区域,每个传感器主要接收该区域发生的声发射波,当这个传感器接收到信号后,就认为该信号源在这个区域内。这样就实现了按传感器监视区域的方式粗略确定出声发射源所处的区域。
这种定位方式对于不同检测通道应是互斥的,在检测系统中为了实现这种互斥,采取某个通道首先接收到信号后,则将该阵列的其他通道闭锁一段时间,然后再打开进行检测。因而可以发现,在阵列中其他检测通道闭锁期间,一方面避免了该信号再被其他通道接收,但另一方面也失去了接收其他声发射信号的机会。目前,国外先进全数字式声发射仪器为了尽可能多的采集声发射信号,采取只要通道有触发并能形成撞击(hit)就接收并保存为原始数据文件的方式,而将各种定位处理放在软件中进行,仅显示出所要求的定位结果但不破坏原始数据文件,这样就避免了由于通道闭锁而丢失信号情况的发生。
(2)按信号到达顺序定位按信号到达顺序定位是在独立通道监视方式的基础上,除了记录信号首先到达的通道外,还记录信号到达同一阵列其他传感器的顺序,这样依据信号到达的次序可以将声源定位在更小的区域内。如图3.1-16b所示,在一个三通道组成的区域定位阵列中,信号首先到达1号通道,则该信号一定来自主区中,信号第二到达2通道,则声源位置将进一步缩小到第二分区内,信号第三到达3通道,则声源位置就进一步缩小到第三分区内。这样一个信号当考虑两个或两个以上到达次序时,就可以将声源位置进一步限定在第二、第三、第四……分区内。
3.时差定位
时差定位又称计算定位,是指在两个或两个以上通道组成的定位阵列中,通过信号到达各通道的时序,以首先到达通道的时刻为基准计算出信号到达其他通道的时差,结合阵列中传感器间距和声速来计算声源的位置或坐标的定位技术。时差定位是一种精确而又复杂的定位方式,由于能给出较精确的声源位置信息而在声发射频度不太高且传播衰减不太大的金属构件检测中广泛应用。
(1)一维定位一维定位是在布置成一维方式的传感器阵列中,利用相邻的两个通道确定声源的一维空间坐标位置,亦称为线定位。一维定位至少采用两个传感器和一组时差,是最为简单的时差定位方式,多用于长度型结构的检测,如桁架式金属结构、实验室试样、长管道、线焊缝等。一维定位原理如图3.1-17所示。
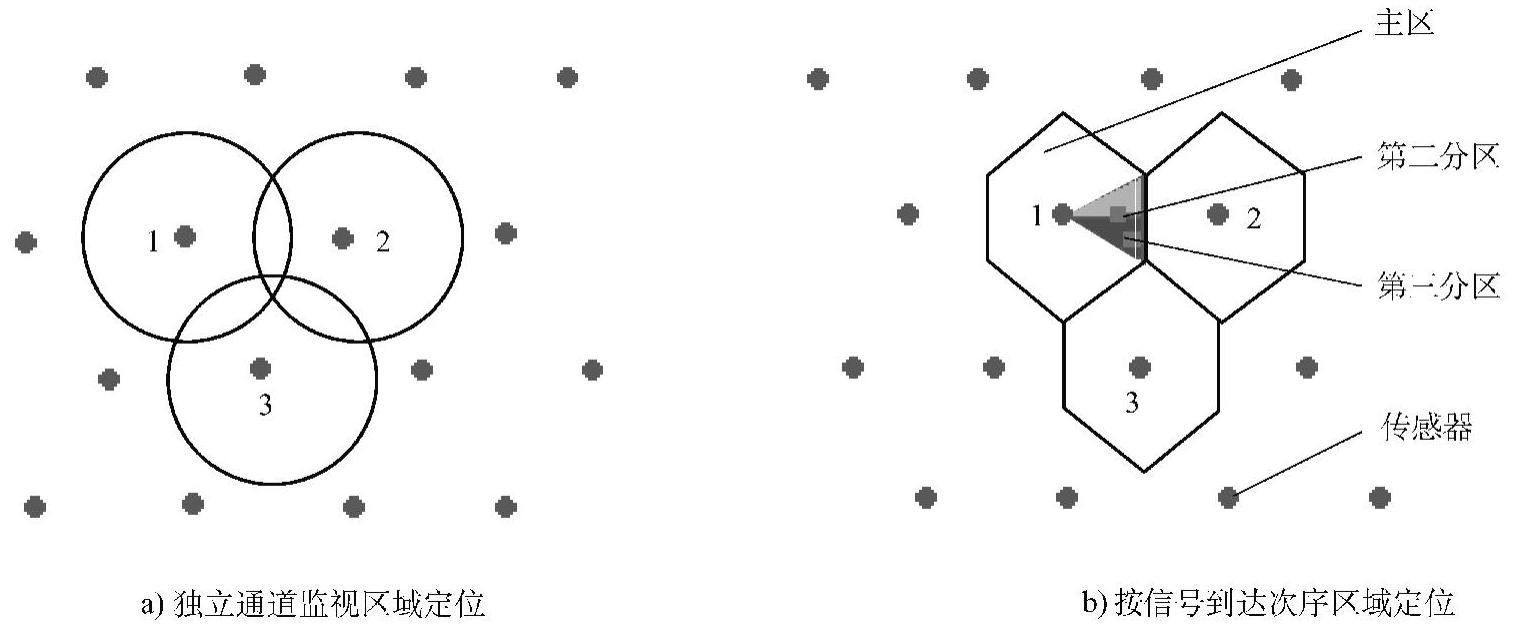
图3.1-16 区域定位原理
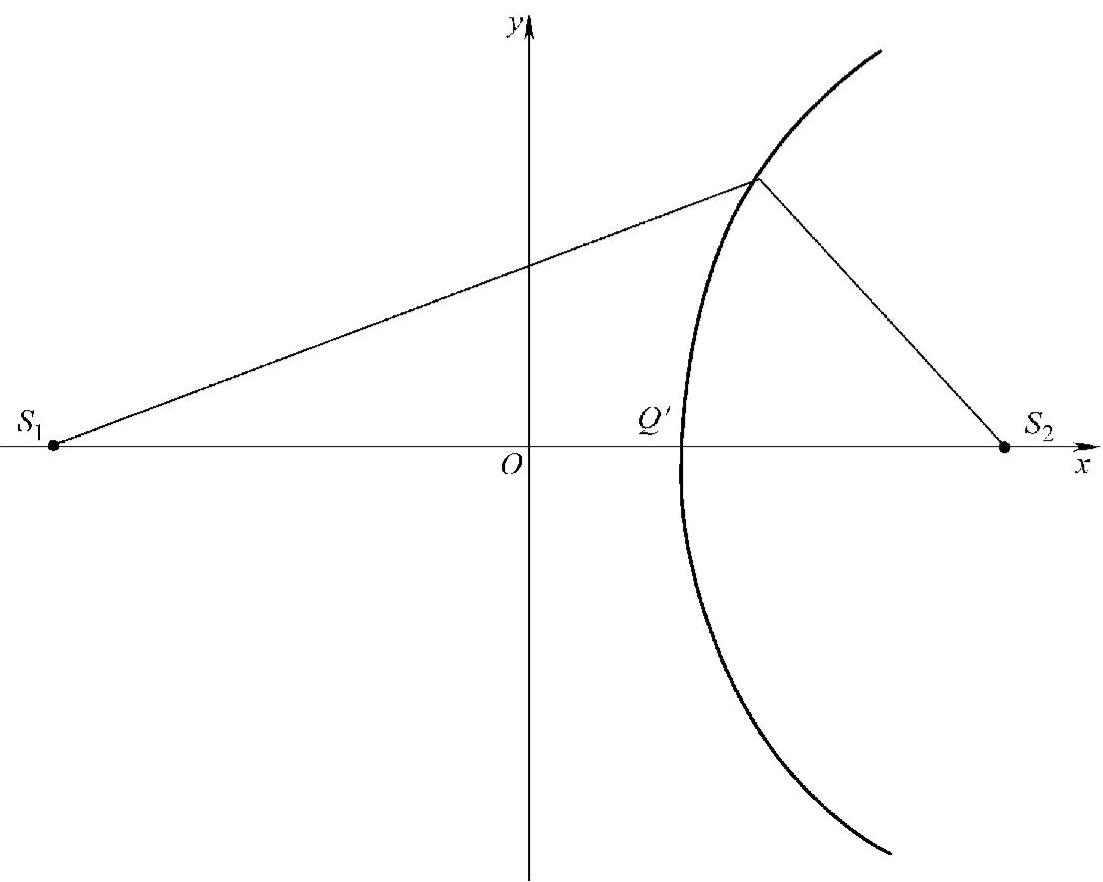
图3.1-17 一维定位法(https://www.xing528.com)
若声发射波从声发射源Q到达传感器S1和S2的时间差为Δt,波速为v,则可得下式
︱QS1-QS2︱=vΔt (3.1-5)
考虑到信号到达两个传感器的时序,可以确定出声源就位于以两个传感器为焦点的一条双曲线上的某个点上。以该双曲线与两个传感器连线的交点Q′的坐标来表示声源坐标。因此可以看出,一维定位所确定的声源位置不是一个点,而是一条双曲线。
(2)二维定位二维定位至少需要三个传感器和两组独立时差,但为得到单一解一般至少需要四个传感器和三组独立时差。传感器阵列形式可任意选择,但为运算简便,在考虑被检件形状的前提下尽可能采用简单阵列形式,如三角形、矩形、菱形等。
由四个传感器构成的菱形阵列二维定位原理如图3.1-18所示。
若由传感器S1和S2间的时差Δty所得双曲线为2,声发射源Q离传感器S1和S3,S2和S4的距离差分别为ΔLx和ΔLy,波速为v,两组传感器间距分别为a和b,那么声发射源就位于两条双曲线的交点Q(X,Y)上,其坐标可表示为
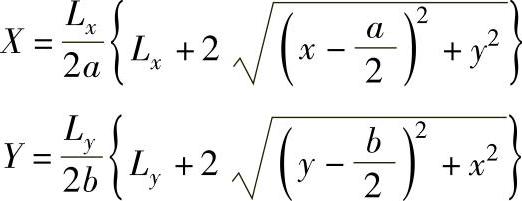
在源定位算法上,不同算法其计算精度和效率也不同,在国外全数字化仪器中还开发了非线性衰减算法(NLR)和过定位算法,他们引入了距离-幅度修正曲线,用于自动生成衰减图谱,以帮助设置适当的传感器间距和检测门槛值以达到预定的检测灵敏度。在进行时差单位计算时,对于二维定位也不限于固定独立时差数量,可以智能地利用3~8撞击信号来进行源定位计算,这样大大改善了定位精度。二维定位的阵列布置除了上述菱形定位方式外,常见的还有三角形定位、矩形定位、传感器任意布局定位、柱形定位、球面定位等,如图3.1-19所示。
(3)时差定位的局限性时差定位因能够给出声源较为准确的位置信息,而在金属结构件检测中广泛应用。不过需要注意的是,时差定位由于涉及多个声发射通道的数据进行复杂的运算,因而使得可以计算出位置坐标的信号条件变得苛刻,这样就有很多信号由于不能定位而不能形成有效声发射事件。例如,在一个两通道线定位阵列中,由于通道间距上的衰减使得在某个传感器附近的低幅度信号在传播到另一个传感器时而不能越过门槛,这样该信号就不能产生定位,就不能形成有效声发射事件。
另外需要注意的是,声发射时差源定位技术受多种因素的影响会使定位精度大大降低。结构件上的衰减不均匀、声速的变化、系统时差精度的限制、大量小信号的干扰、传感器耦合质量差异、通道灵敏度差异等等都会造成定位精度的急剧下降。一般而言,用铅笔芯折断模拟源校准的定位精度可以达到5%~10%,但实际检测中,针对实际声发射信号的定位精度会大大降低。因此,在声发射检测中不可盲目追求定位的准确度,而应统计的观察定位结果,不能将定位显示与被检件相应位置进行一一对应,但定位集中区域与被检件具有良好的对应关系。
时差定位需要利用声速进行计算,因而可以应用时差定位技术的被检材料应具有在各个传播方向上基本一致的传播特性,也就是各向同性的材料才可应用时差定位技术。但在纤维增强复合材料检测中,某些情况下也可以采用一维时差定位技术。
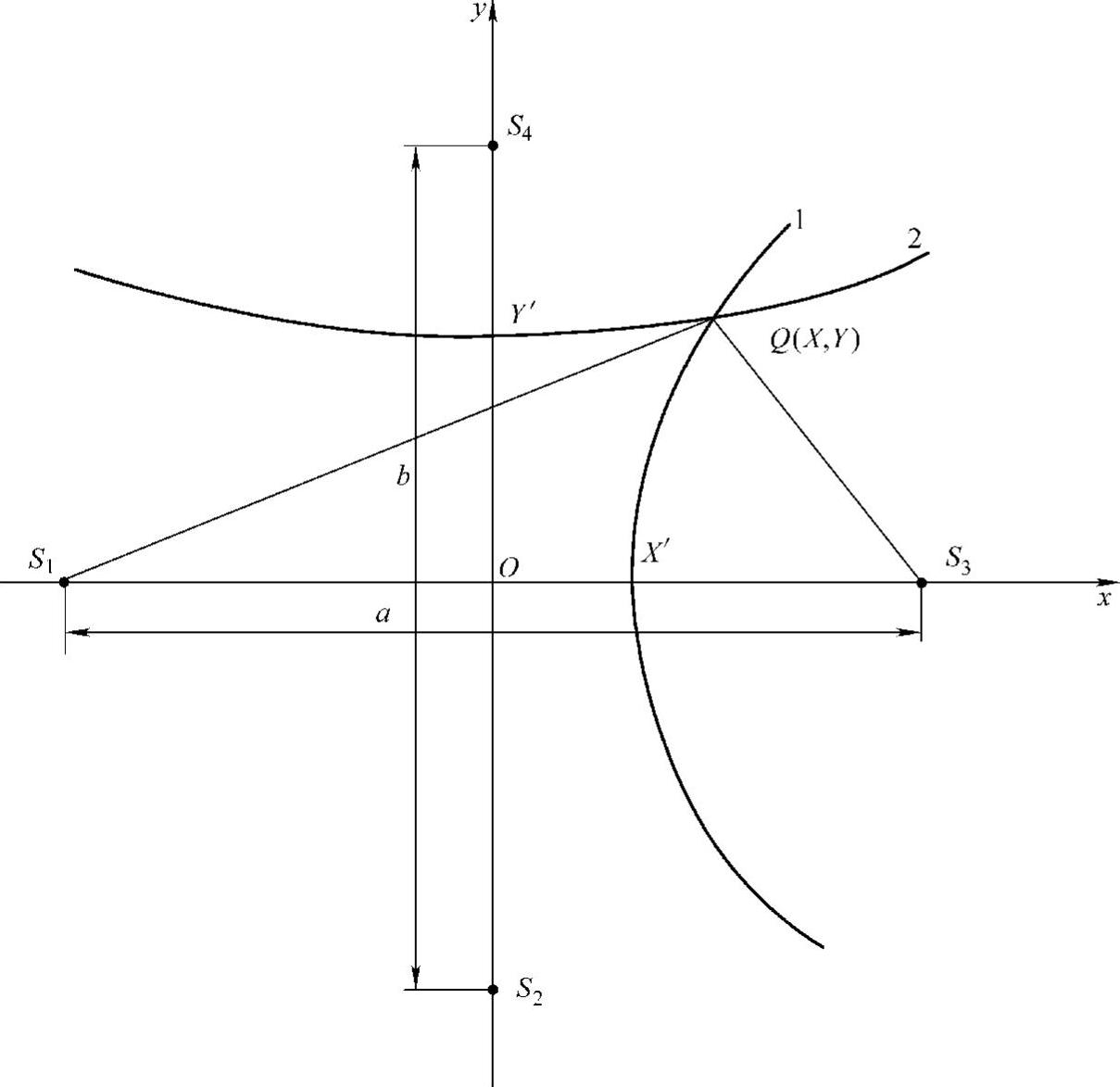
图3.1-18 二维定位
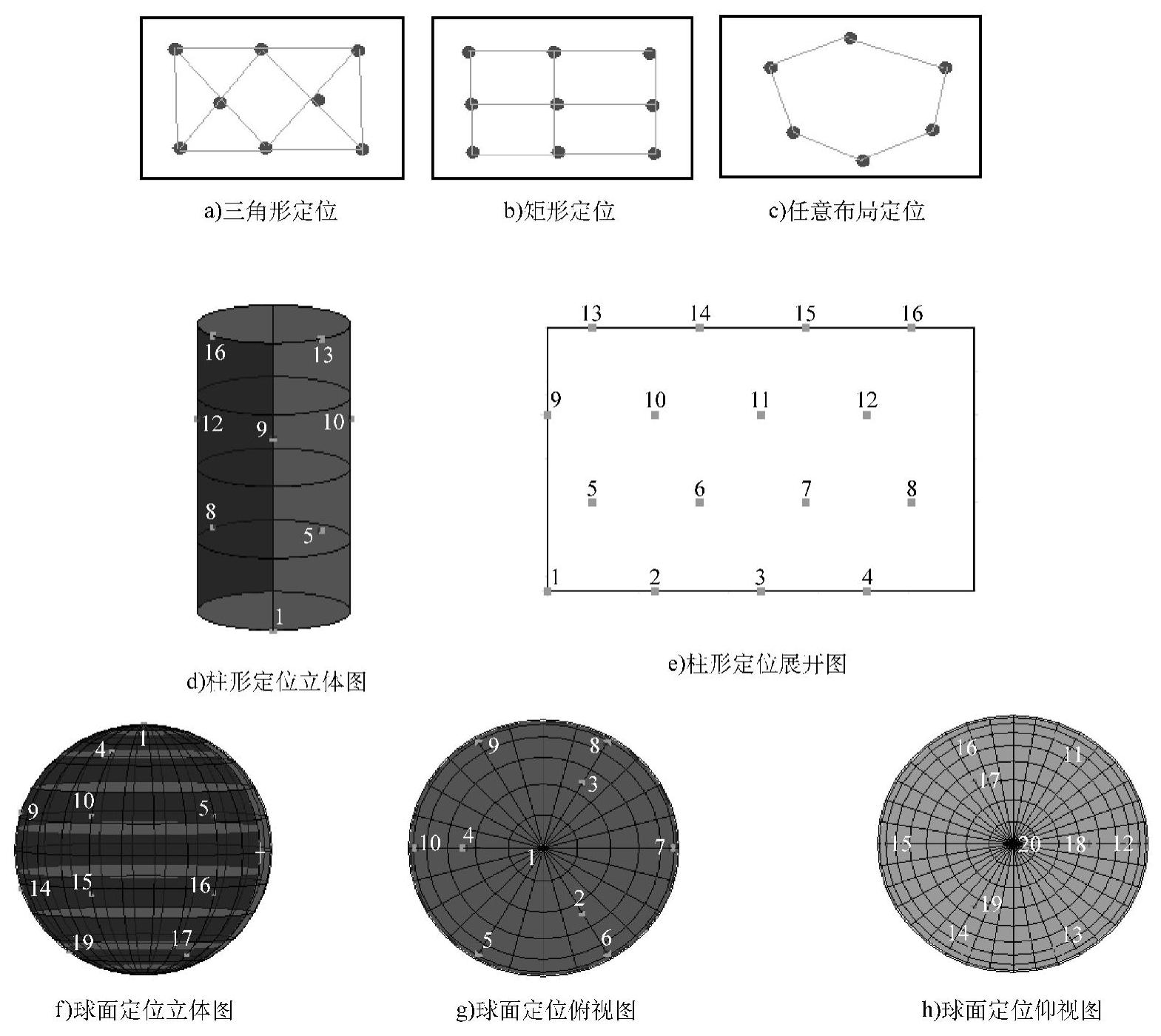
图3.1-19 不同定位阵列示意
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。