



在这一部分,提供了这个问题的完成结果。
操作步骤:
步骤1 打开装配体文件
打开文件夹“SolidWorks Motion Simulation\Lesson12\Case Study\Surgical Shear”下的文件“Surgical_shear”。
提示
配合的名称一般来说并不重要,但为了确保描述配合的文字与模型相符,在下面的步骤中给出了特定配合的名称。如果用户以不同顺序添加了配合,只需要将配合重新命名以符合图片所示的内容即可。
步骤2 锁定配合
两个刀片刚性地连接在固定和活动刀具上,因此合适的配合类型为锁定配合,如图12-6所示。
步骤3 重合配合
活动刀具沿着固定刀具的杆滑动,使用重合配合可以保证这个关系,如图12-7所示。
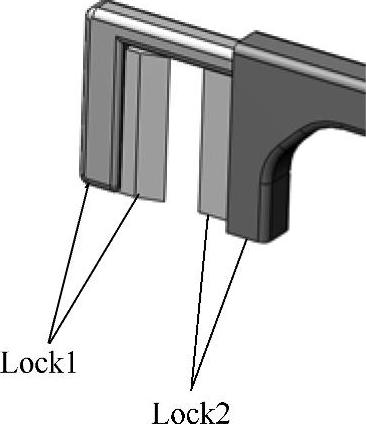
图12-6 锁定配合
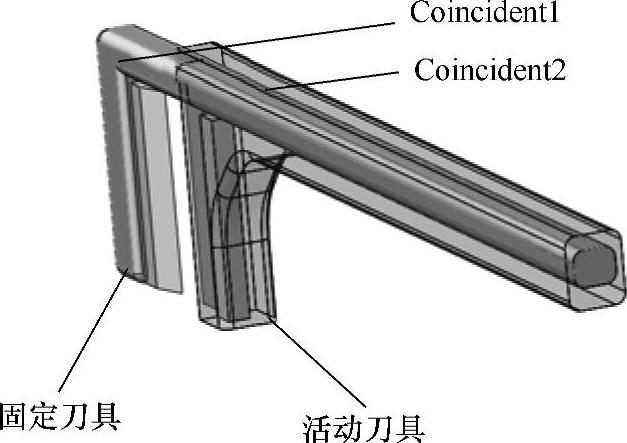
图12-7 重合配合
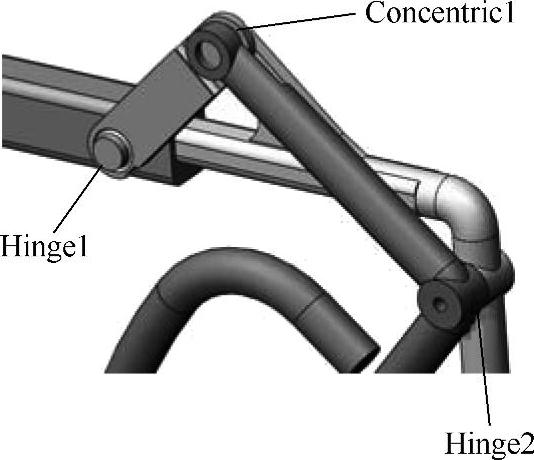
图12-8 配合连杆
步骤4 连杆的配合
这里需要三个配合来连接连杆。可以使用铰链配合将手柄handle连接到固定刀具fixed_cutter,另一个铰链配合将handle_link和moving_cutter连接在一起。
在余下的handle和handle_link之间的配合应当为一个【同轴心】配合,这里最好选择面,以避免过定义配合,如图12-8所示。
步骤5 闭锁机构的配合
闭锁机构需要两个不同的配合。使用一个铰链配合来控制相对于固定刀具fixed_cutter的旋转和位置,所选曲面如图12-9所示(活动刀具moving_cutter已经被隐藏)。
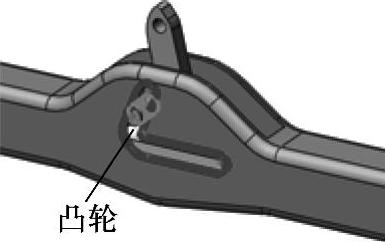
可以使用一个【凸轮】配合,将latch上的凸起配合到活动刀具moving_cutter的狭槽中,如图12-10所示。在这个问题最初的解决方案中,不会使用这个凸轮配合,但是会在运动算例中使用接触。

图12-9 铰链配合
 (https://www.xing528.com)
(https://www.xing528.com)
图12-10 凸轮配合
步骤6 设置最初位置
在生成运动算例之前,需要将活动刀片的初始位置设定为与固定刀片间距为7.25mm的位置,如图12-11所示。使用【只用于定位】的配合来设置这个距离。其他所有部分都已定位完毕,接下来还需要确保latch上的凸起接触到正确的曲面,在添加配合和一个弹簧时,这些条件将强制凸起接触曲面。然而这里要确定当运动算例开始时,凸起不会移至曲面,也没有必要生成一个不会发生在物理零件上的瞬时条件。
临时将活动刀具moving_cutter设为【固定】,使用【相切】和【只用于定位】选项设置latch上的凸起配合到狭槽的曲面,如图12-12所示。然后再将moving_cutter设置为【浮动】。
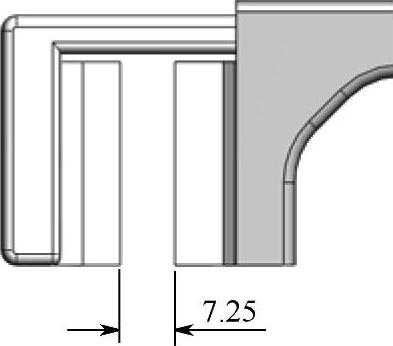
图12-11 设置最初位置
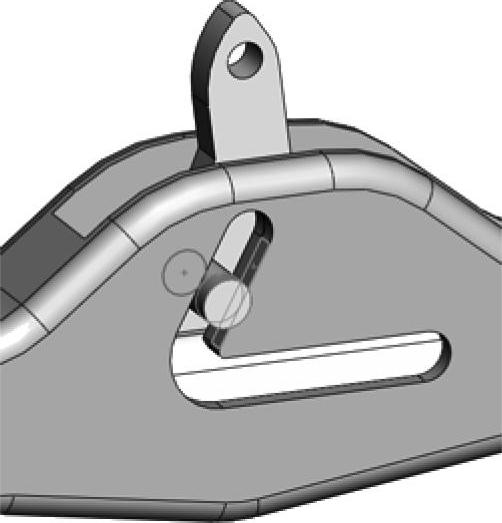
图12-12 定义配合关系
步骤7 新建一个运动算例
步骤8 添加一个弹簧
添加一个线性弹簧用于连接latch和fixed_cutter。将【刚度系数】设为“0.175牛顿/mm”,【自由长度】设为“40mm”,如图12-13所示。
步骤9 添加接触
在latch和moving_cutter之间添加【实体】接触,指定【材料】为【Steel(Dry)】,选择动态和静态【摩擦】,单击【确定】。
步骤10 添加一个旋转马达
当外科医生使用这个外科剪时,握住手柄将其转动12°,再松开这个过程大约需要1s。为了模拟这个操作,这里将添加一个【旋转马达】。马达参数应该设定为【振荡】、“12度”、“1Hz”,保留【相移】为“0度”,如图12-14所示。
步骤11 设置运动算例属性
设置属性并设置【每秒帧数】为“100”,勾选【使用精确接触】复选框,确定没有选择【以套管替换冗余配合】。
步骤12 运行仿真
运行此仿真1s。
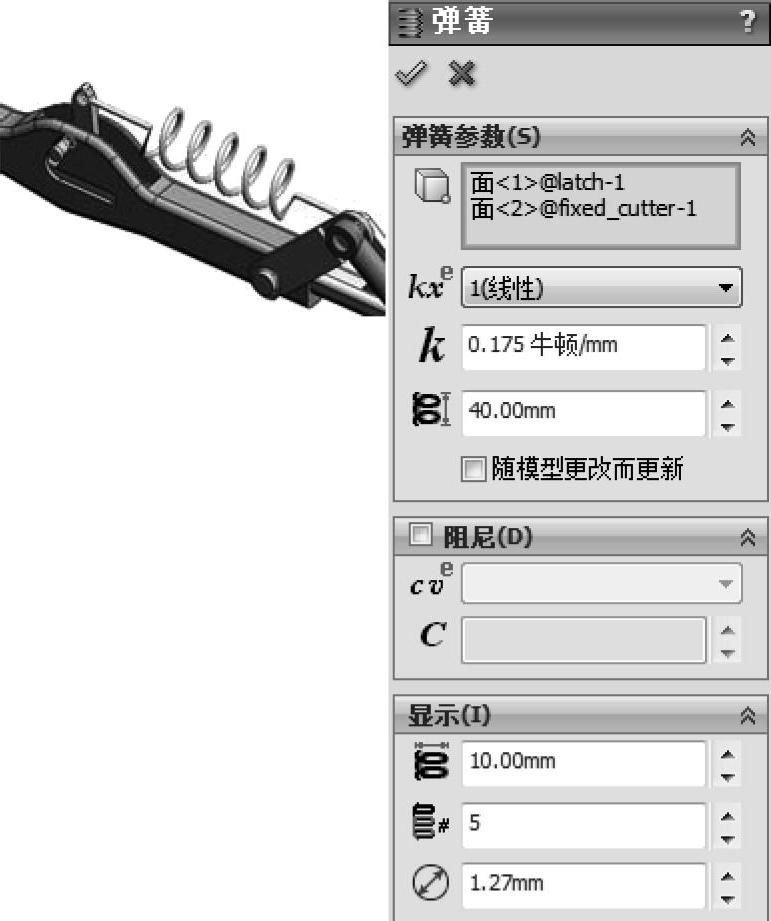
图12-13 定义弹簧
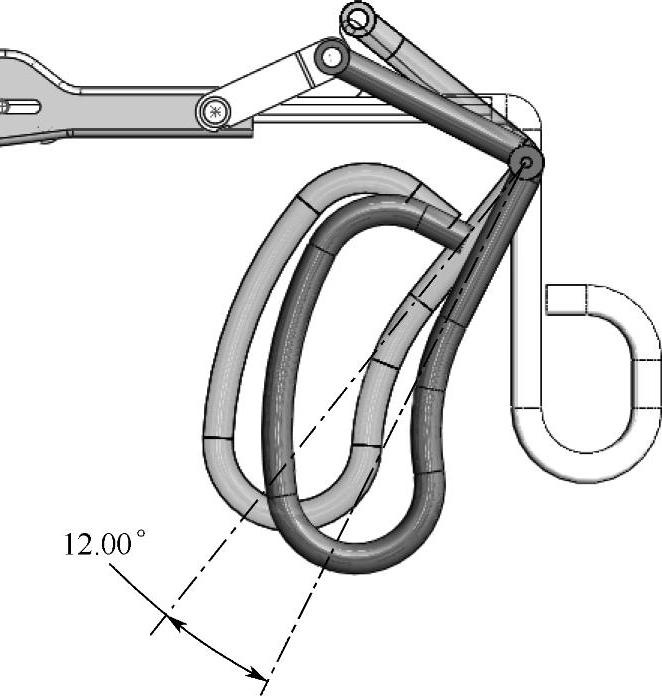
图12-14 添加马达
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。