



【摘要】:传感器可以用于触发或停止事件。在基于事件的仿真中可以用到三种不同类型的传感器:● 传感器:用于检测碰撞。步骤6 定义接近传感器1使用两个接近传感器来控制这个系统。选择如图11-4所示的Sensor1上的面作为。域可以保持空白,以保持默认的竖直方向。提示当盒子抵达支架的水平平台时,12mm的范围被用于触发必要的事件。图11-5 尺寸范围步骤7 定义接近传感器2类似地,定义第二个接近传感器来探测带孔盒子,将此传感器更名为“Sensor2”。
传感器可以用于触发或停止事件。在基于事件的仿真中可以用到三种不同类型的传感器:
● 【干涉检查】传感器:用于检测碰撞。
● 【接近】传感器:用于探测越过一条线的实体运动。
● 【尺寸】传感器:用于探测零部件相对于一个位置的尺寸。

步骤6 定义接近传感器1
使用两个接近传感器来控制这个系统。Sensor1用来探测到达支架底部平台的实体盒子,通过Sensor2来探测带孔盒子,如图11-3所示。定义【接近】传感器,探测平台上实体盒子的存在。选择如图11-4所示的Sensor1上的面作为【接近传感器位置】。【接近传感器方向】域可以保持空白,以保持默认的竖直方向。在【要跟踪的零部件】域中选择两个实体盒子。在【接近传感器范围】中输入“12.00mm”,如图11-4所示。
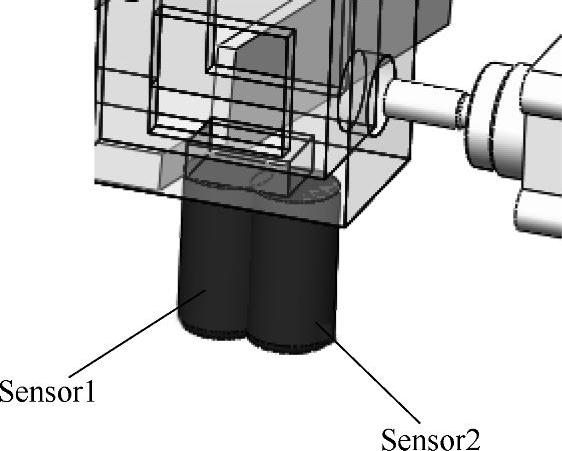
图11-3 传感器位置

图11-4 定义传感器
单击【确定】,将该传感器重命名为“Sensor1”。
提示(https://www.xing528.com)
当盒子抵达支架的水平平台时,12mm的范围被用于触发必要的事件。因为平台的厚度为10mm,当盒子接近平台时,任何大于10mm的传感器范围将触发一个事件,如图11-5所示。

图11-5 尺寸范围
步骤7 定义接近传感器2
类似地,定义第二个接近传感器来探测带孔盒子,将此传感器更名为“Sensor2”。
步骤8 定义接触
定义下列4个实体接触,如图11-6所示。操作时,应尽量使用接触组来简化接触方案。
步骤9 引力
在Y轴负方向定义【引力】。

图11-6 定义接触
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。