



本练习将从一个闭锁机构中输出载荷到SolidWorksSimu-lation中,处理并分析这个零件,如图10-38所示。
本练习将应用以下技术:
● 输出结果
项目描述
确定零件JSpring的最大应力及挠度。
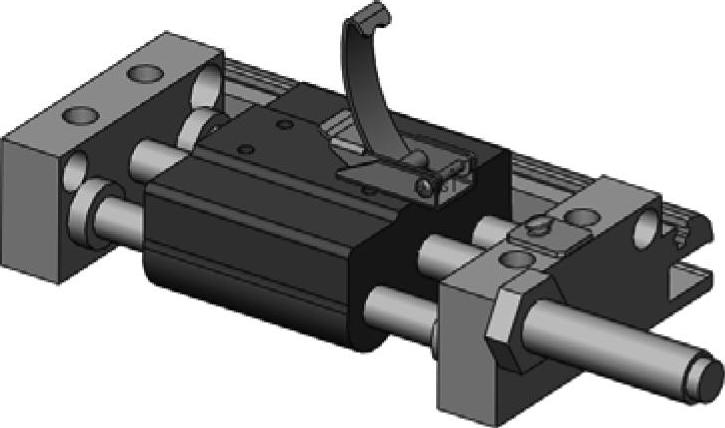
图10-38 闭锁机构
操作步骤
步骤1 打开装配体文件
打开文件夹“SolidWorks Motion Simulation\Lesson10\Exercises\Latching mechanism”下的文件“Full latch mechanism”。这和第4章中用到的装配体相同,已经设置并运算完成了运动算例。
步骤2 播放此算例
单击【播放】(无需运算),回想该机构是如何工作的。
步骤3 指定承载面
找到配合Concentric6,这个配合用做弹簧枢轴。编辑这个配合,指定显示为承载面的四个面。在爆炸视图中可以更加清楚地显示这两个零件。在【配合位置】中,选择夹子或销钉分割面的边线,如图10-39所示。
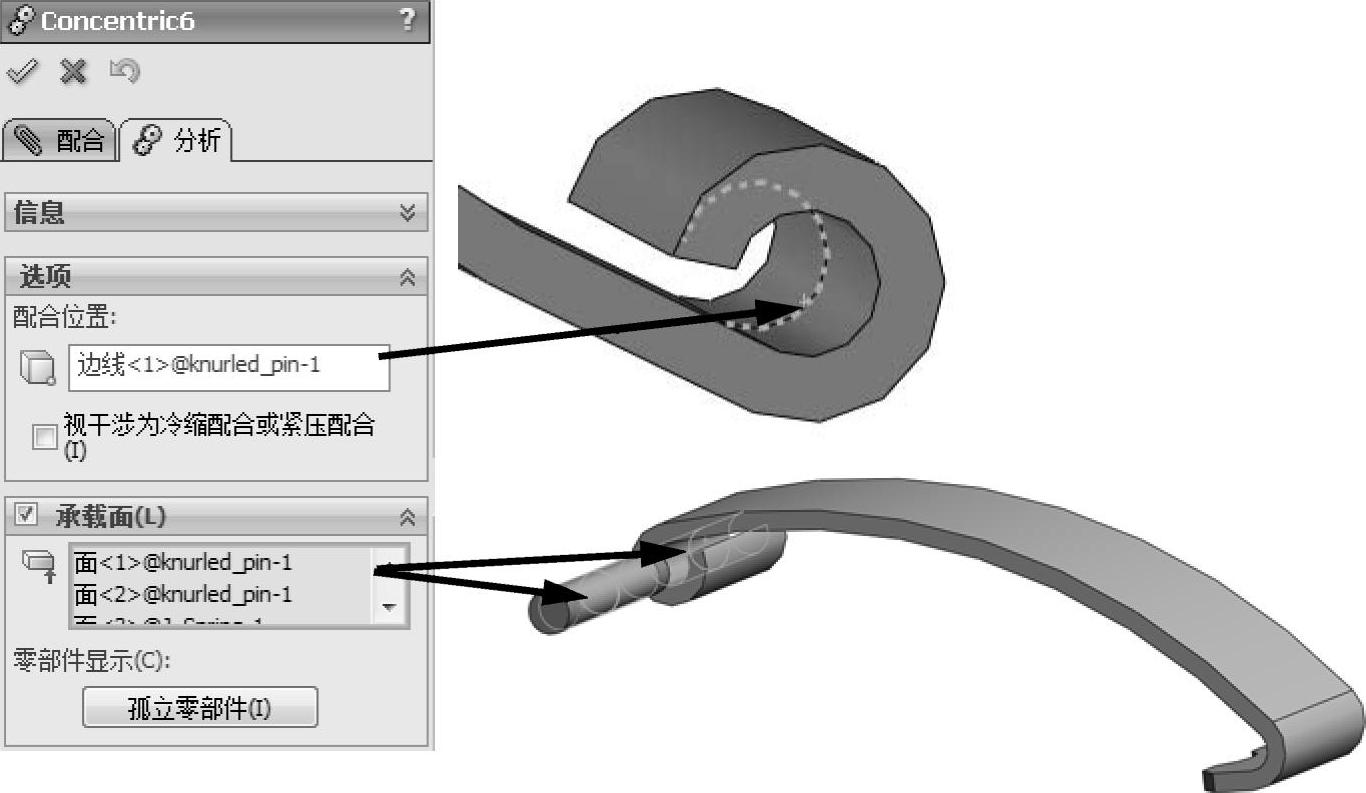
图10-39 指定承载面
步骤4 重新运行仿真
因为接触面和配合位置发生了改变,运动仿真需要重新计算。
步骤5 检查接触力的图解
如图10-40所示,J_spring和keeper之间的接触力幅值图解已经创建完毕,可以看到最大值出现在大约2.4s处。
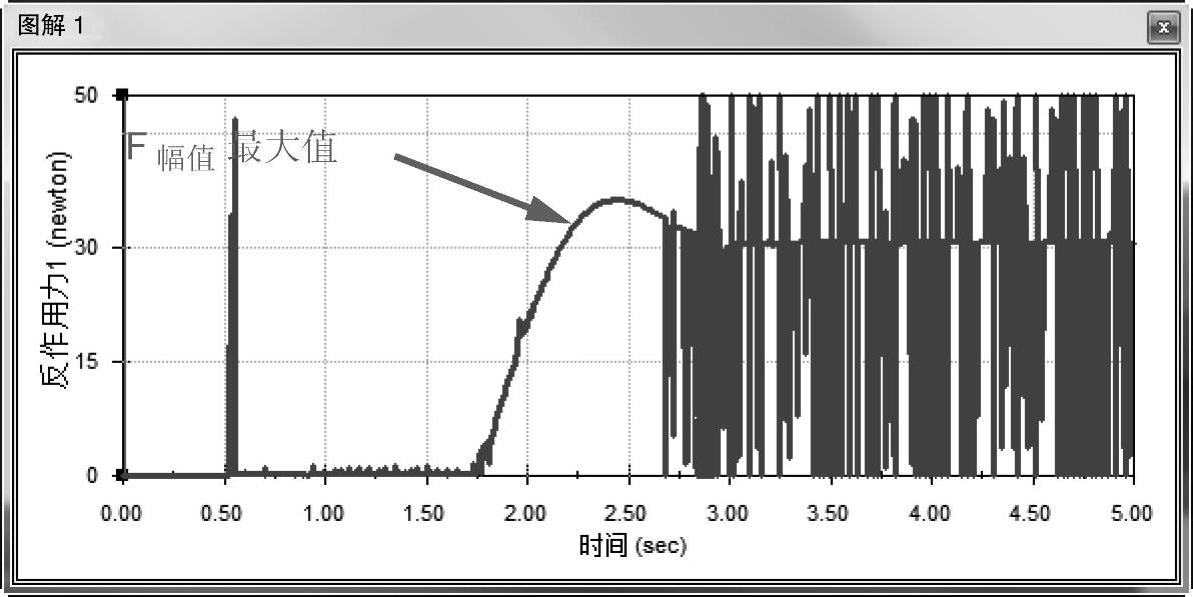
图10-40 查看图解(一)
步骤6 生成其他图解
图解显示X(红)和Z(蓝)这两个分量的接触力,如图10-41所示。由于期望Y(绿)分量为零,或接近于零,因此没有必要在此分析。
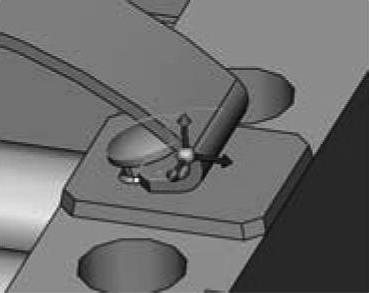
图10-41 定义图解(一)
提示
默认情况下,输出的力都采用装配体的全局坐标系,如图10-42和图10-43所示。
提示
用户不必选择真实的接触面,而只需选择零部件就可以了。
为突出效果,本练习将在X分量为最大值的点运行这个分析。
步骤7 生成一个附加图解
对连接J_spring和knurled_pin的配合Concentric6,生成一个图解显示接头的反作用力。
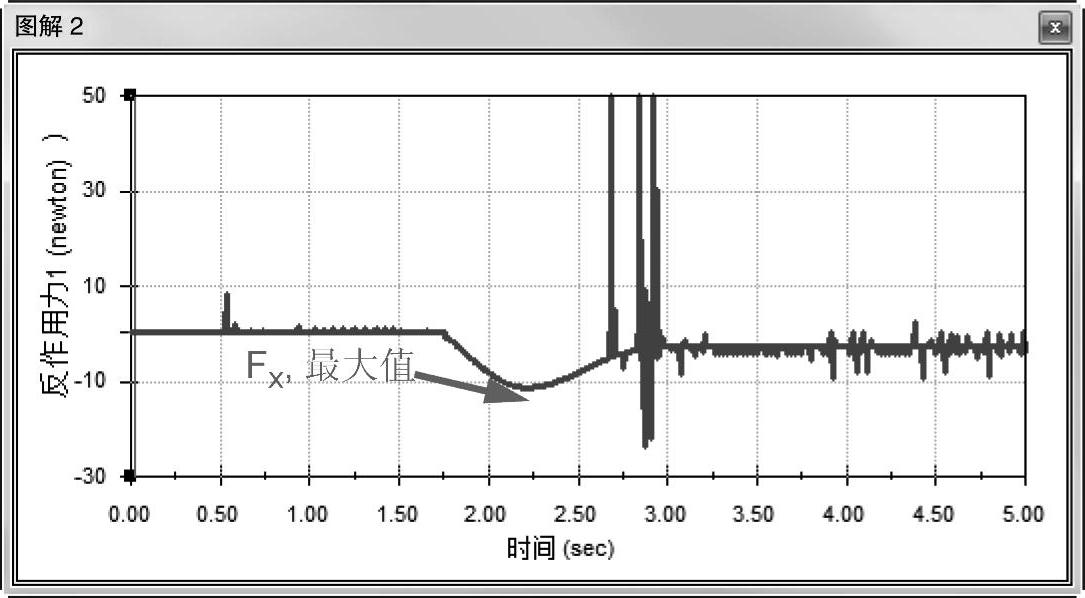
图10-42 查看图解(二)
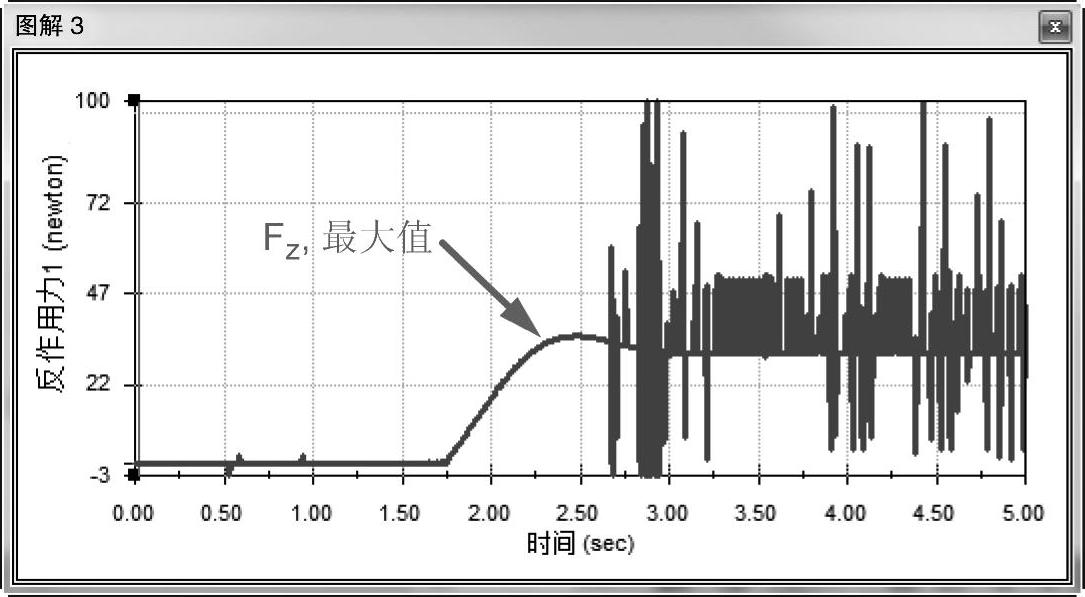
图10-43 查看图解(三)
修改图解的Y轴,将【终点】改为“50”,如图10-44所示。将这个图解和接触力的第一个图解进行比较。两个图解应该完全相同,比如,这个力的幅值必须与接触力的相同。关闭这个图解。
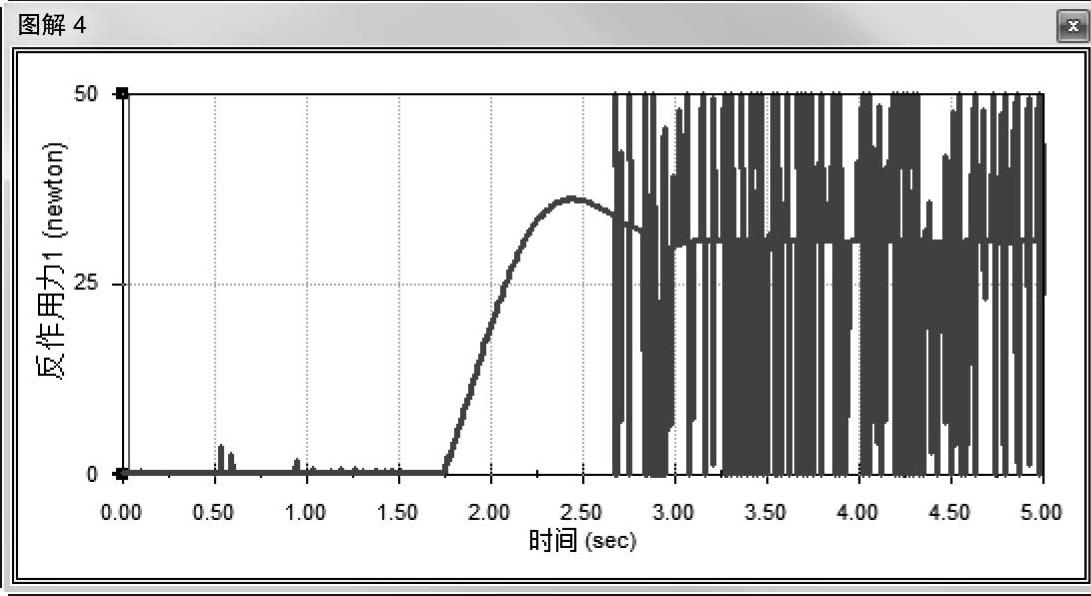
图10-44 查看图解(四)
步骤8 修改图解以显示帧
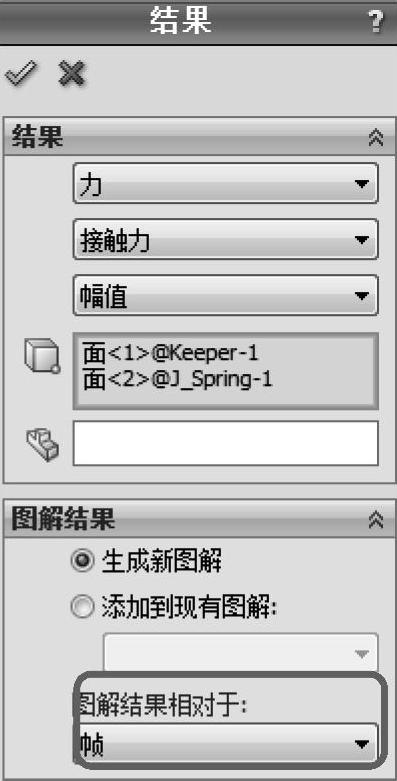
修改接触力幅值图解,将【图解结果相对于】处设置为【帧】,如图10-45所示。
步骤9 更改轴的范围
为了能更清楚地观察所关注的区域,需修改图解的X轴,显示帧的范围为300到350。
为了更容易识读图解,将X轴的主单位和次单位分别改为10和5,如图10-46所示。
10-45 定义图解(二)
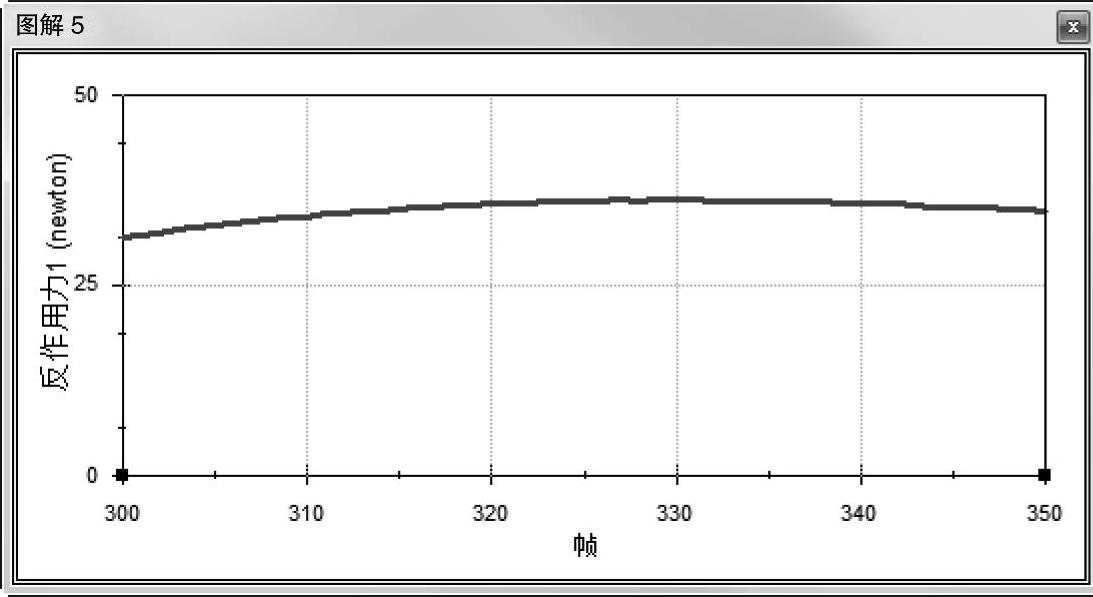
图10-46 更改轴的范围(https://www.xing528.com)
此时可以看到最大的载荷出现在约第325帧处。在输出运动载荷至SolidWorks Simula-tion时,将只输出这一帧的数据。
步骤10 修改图解
对接触力图解的X和Z这两个分量,更改X轴的显示为【帧】。
提示
选择第325帧输出载荷,虽然X方向和Y方向力的最大值可能不会出现在同一帧中,用户可以选择邻近的任意帧输出力。
步骤11 输出力
在步骤6中,已确定两个关注的方向为X和Z,如图10-47所示。这里只输出这两个方向的力,因为Y方向在本质上应该为零。将J_Spring上的X和Z两个方向的接触力输出为CSV文件。右键单击每个图解并单击【输出到电子表格】。每个文件都会得到一个默认的名称,并保存在与装配体相同的路径中。
步骤12 检查输出数据
分别打开两个CSV文件,并注意第325帧的数值,如图10-48所示。
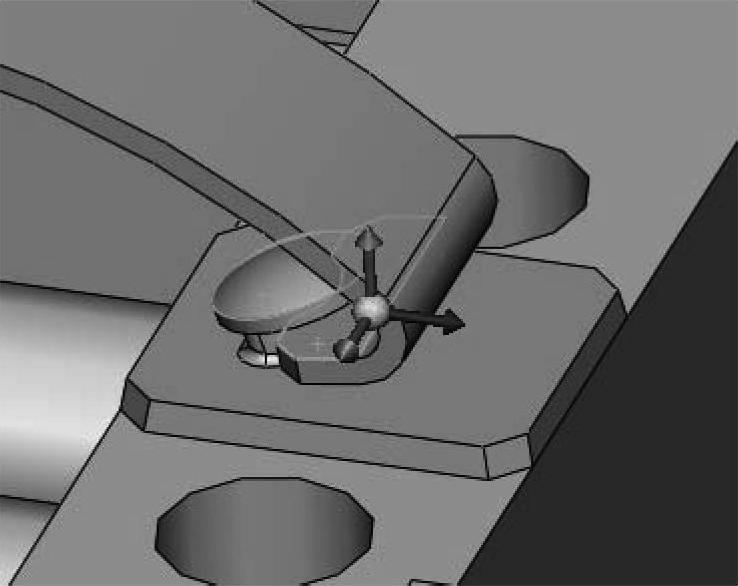
图10-47 输出力
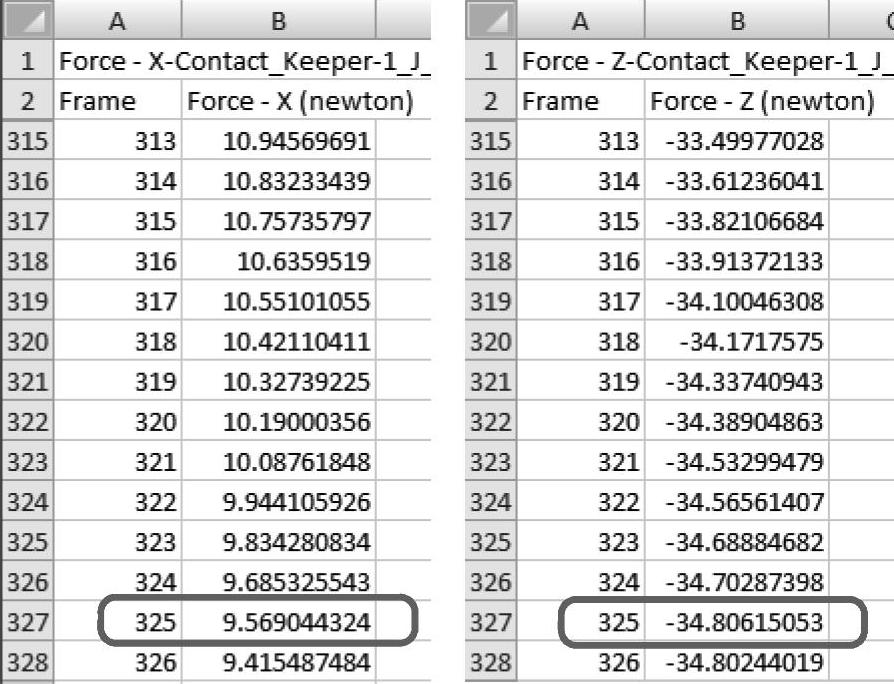
图10-48 输出数据
步骤13 输出运动载荷
在计算完成后,保存结果并只输出第325帧上JSpring-1的载荷,如图10-49所示。
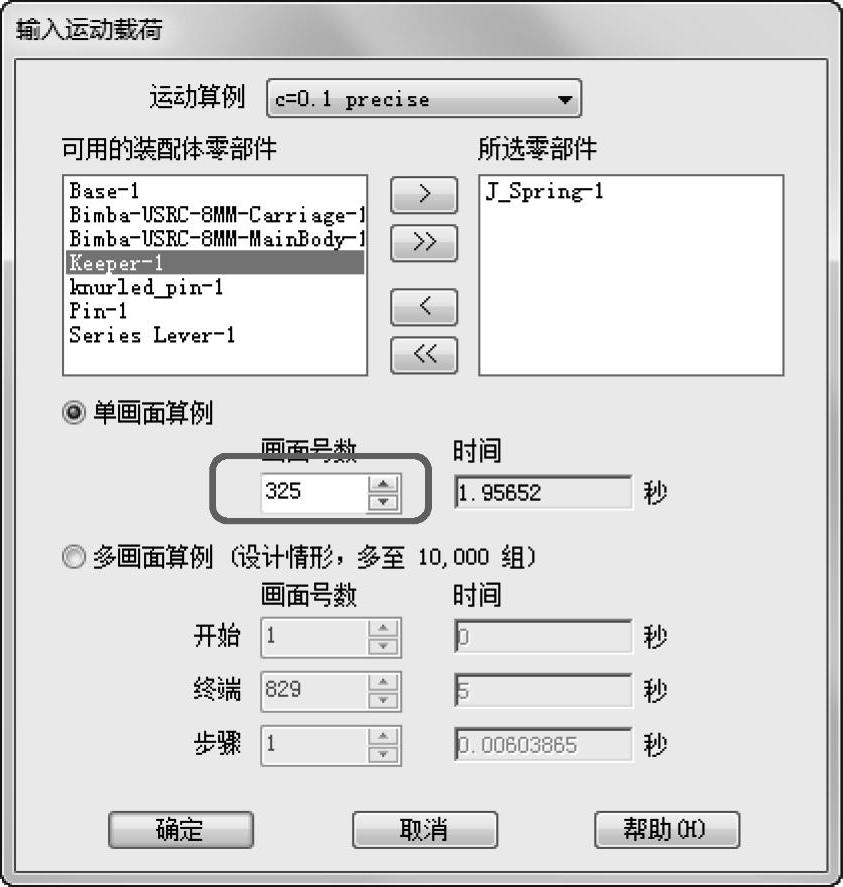
图10-49 输出运动载荷
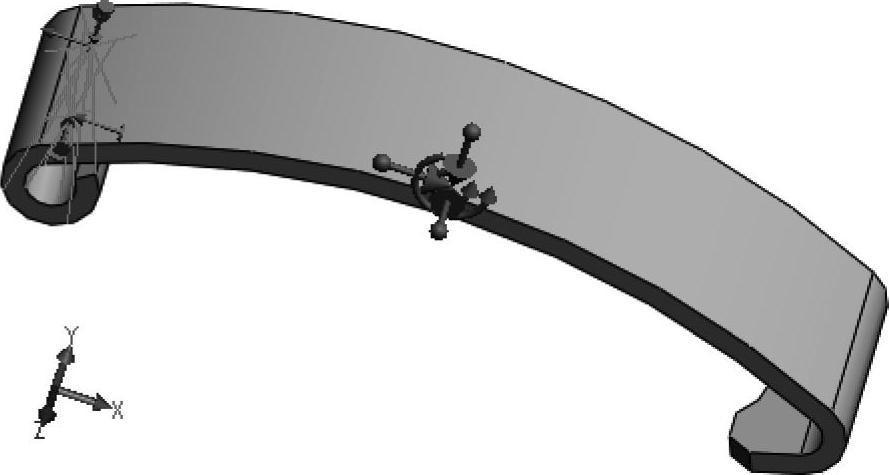
图10-50 加载力
步骤14 打开零件
在自身窗口打开零件J_Spring。
步骤15 仿真算例
选择新算例的仿真页面CM1-ALT-Frame-325。配合载荷已经输入到零件中,但是这里还必须手工加载接触力。请注意,这个零件的坐标系方向不同于装配体的坐标系方向。装配体中的X方向对应零件中的Y方向,装配体中的Z方向对应零件中的X方向。在对这个零件加载接触力时,必须确保在零件的坐标系上使用了正确的力,如图10-50所示。
步骤16 应用X向接触力
对图10-51所示的面添加一个大小为-9.94N和34.56N(来自CSV文件输出的数值)的力。选择Right基准面定义方向,如图10-51所示。
步骤17 应用材料
在Simulation Study树中指定零件材料为“合金钢”(Alloy Steel)。
步骤18 划分模型网格
在Simulation Study树中右键单击【网格】,然后单击【生成网格】。
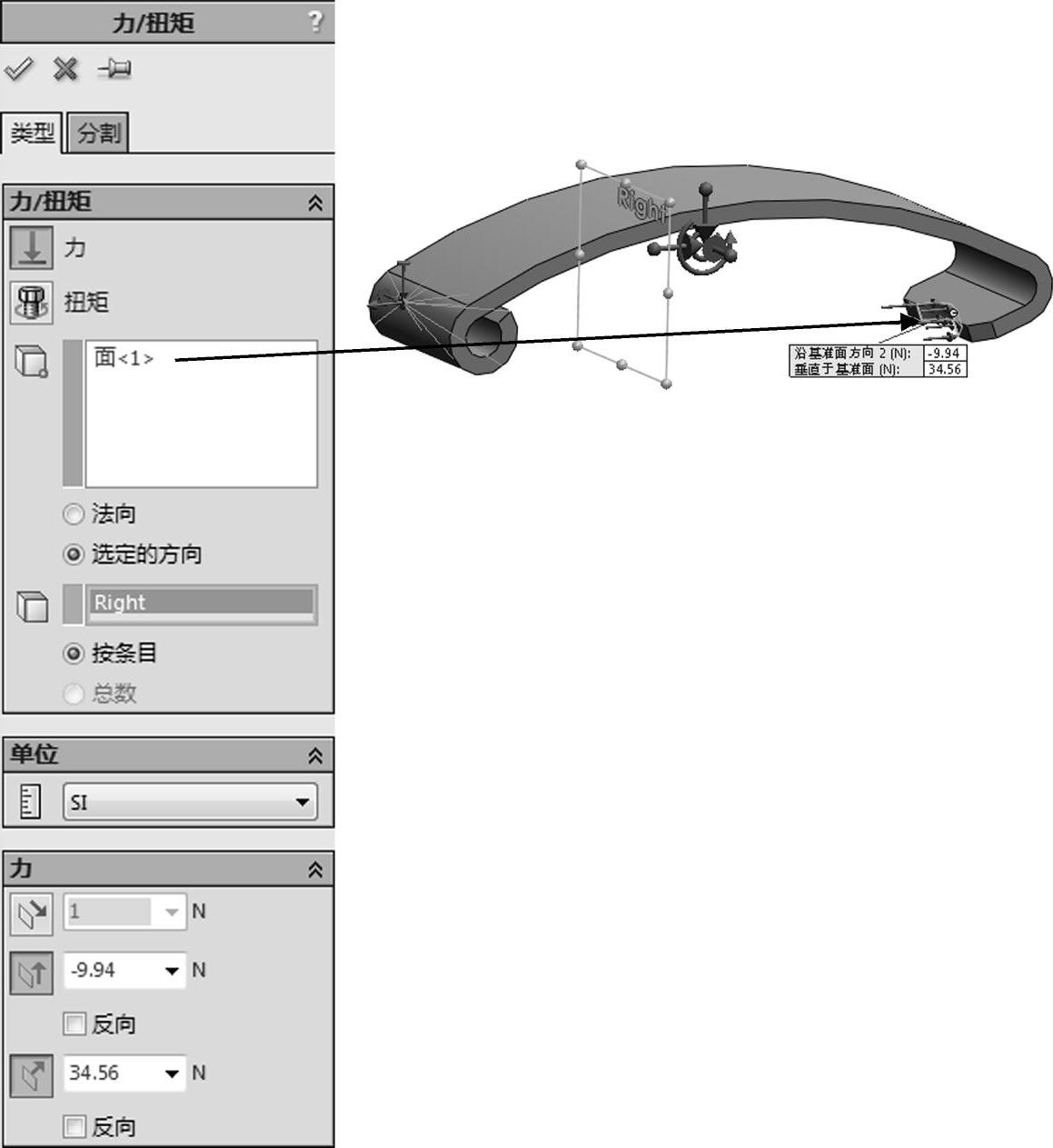
图10-51 定义力1
在【网格参数】下选择【基于曲率的网格】,使用默认设置,生成效果如图10-52所示。单击【确定】。
步骤19 运行算例
右键单击算例并单击【运行】。此时将会得到一个警告提示:“警告:在X-方向中存在大量的外部不平衡力,此将在应用相反惯性力后被平衡。除非您的模型承受这样的力或者多少承受一点不平衡力,应用惯性卸除可改变您的模型的特性。”这是从运动仿真中输出载荷并手工输入数值的结果。因此这个零件可以考虑为近乎自平衡的,所以单击【是】。
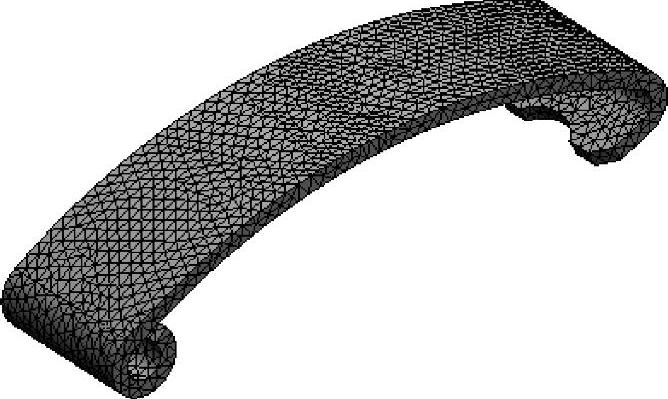
图10-52 网格结果
步骤20 应力图解
查看应力图解,可以看到最大应力为148.23MPa,低于J_spring的屈服极限,如图10-53所示。
步骤21 定义安全系数图解
生成一个安全系数图解来判断零件是否屈服失效。右键单击结果文件夹,单击【定义安全系数图解】。使用默认值生成一个图解,显示安全系数的分布,如图10-54所示。单击【确定】。
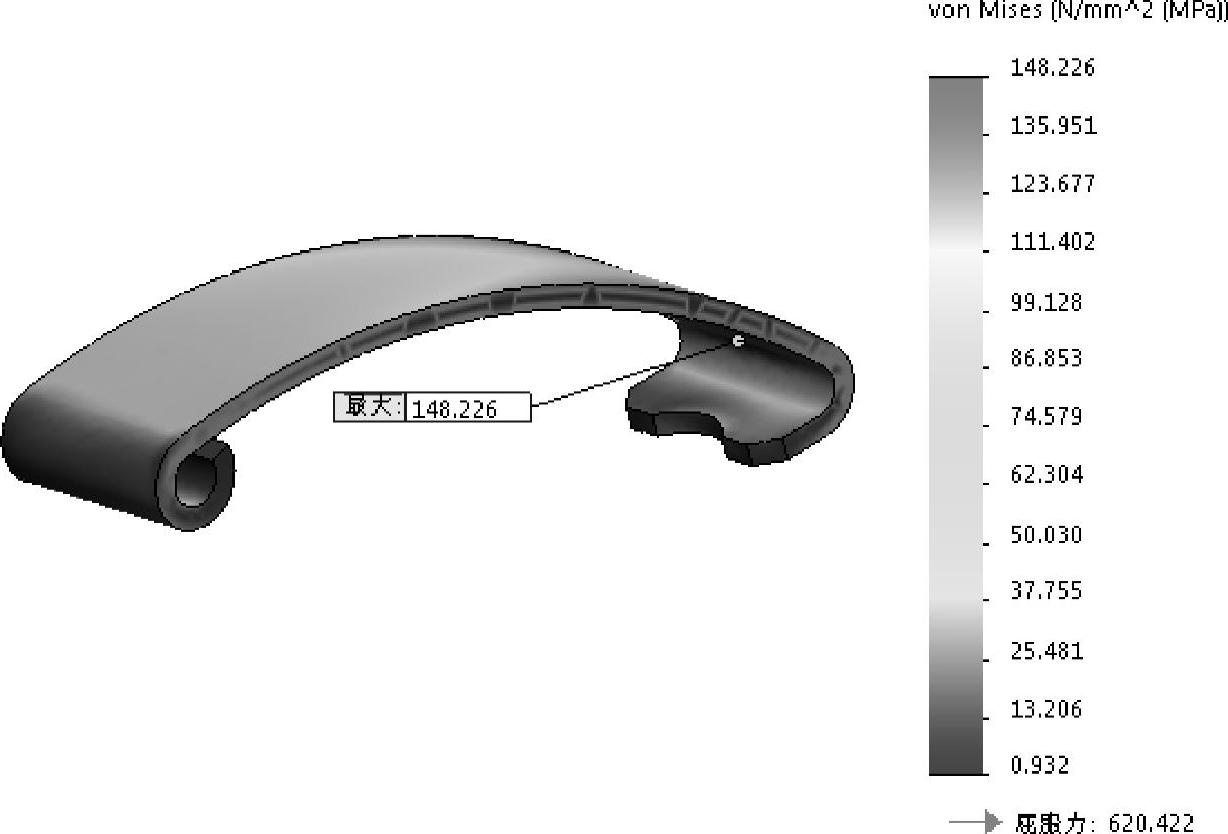
图10-53 应力图解
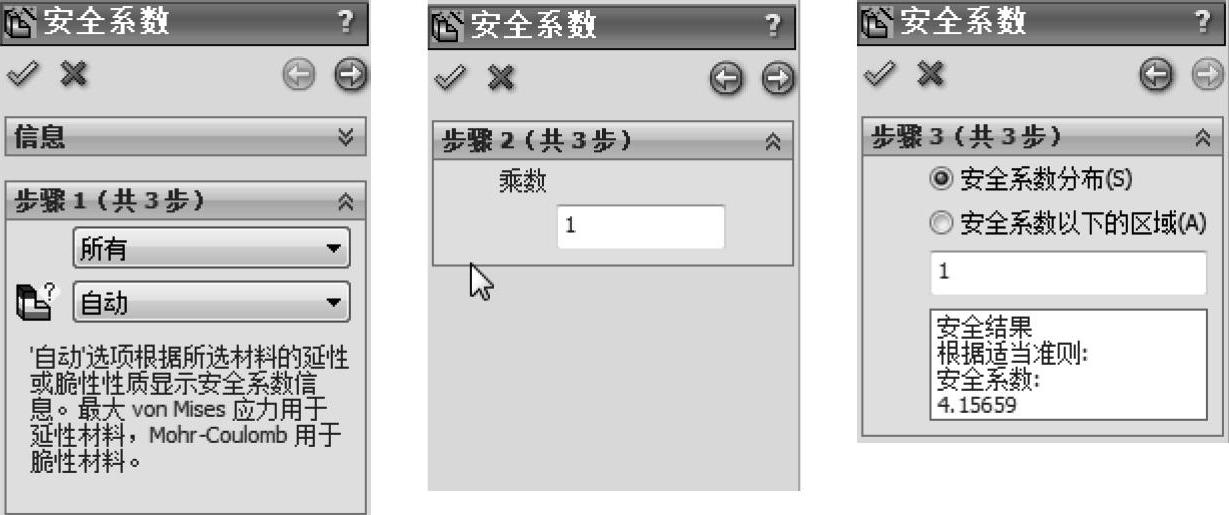
图10-54 定义安全系数图解
步骤22 检查图解
此时可以看到最小安全系数为4.19,因此这个零件并没有屈服失效,如图10-55所示。

图10-55 安全系数图解
步骤23 保存并关闭文件
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。