



本练习将进一步检查使用本地柔性配合来正确计算作用力。练习中将使用和第3章一样的抛射器模型,如图9-56所示。当冗余很多时,SolidWorks Motion能够正确求解运动,但是力的分布可能不正确。
本练习将应用以下技术:
● 冗余
● 冗余的影响
● 在积分器中移除冗余
● 检查冗余
项目描述
计算长臂和配重块之间的枢轴上的力。

图9-56 抛射器
操作步骤
步骤1 打开装配体文件
打开文件夹“SolidWorks Motion Simulation\Lesson09\Exercises\Catapult”下的文件“Catapult-assembly”。这个装配体已经设置完毕并在算例“original study with results”中运算过。
步骤2 检查装配体
通过一个简单配合ConcentricB将配重块和长臂连在一起,通过Coincident4将配重块和长臂对齐在中间位置,如图9-57所示。
步骤3 运行仿真
步骤4 查看自由度
这个装配体有54个冗余约束,但运行起来没有任何问题。当求解这个运动学问题时,合力的分布可能不正确,如图9-58所示。

图9-57 查看配合
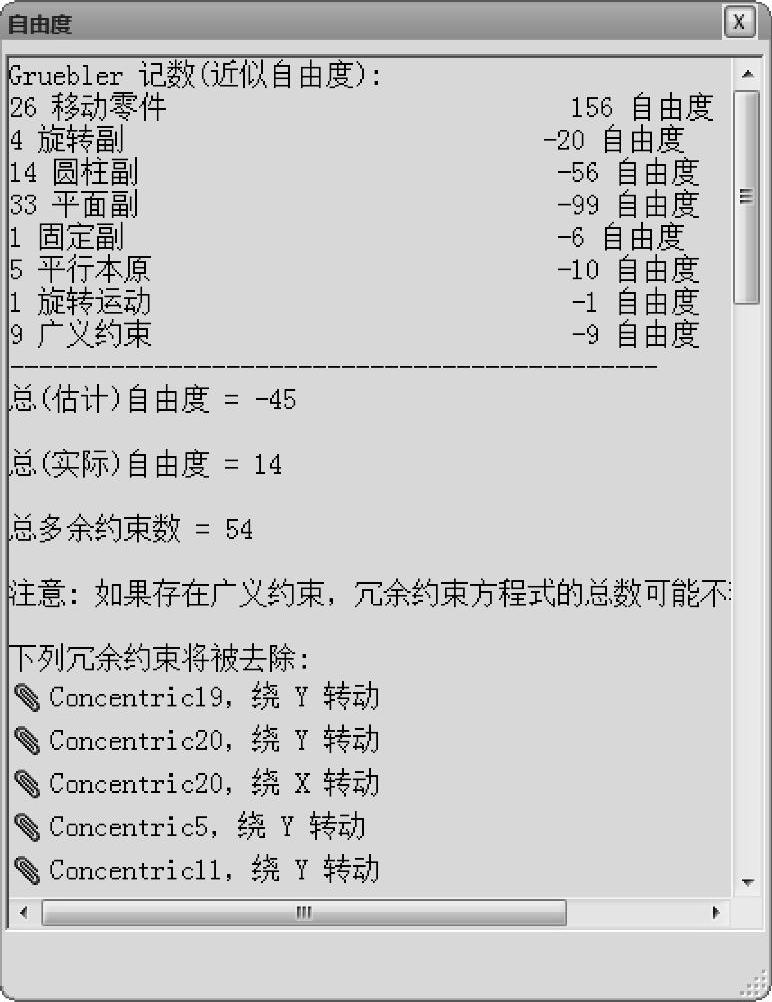
图9-58 自由度结果
步骤5 生成图解
对配合ConcentricB生成全局Y方向的反作用力图解,如图9-59所示。
可以看到当长臂转至开始提升配重块时,力的大小约为-1.22N。
步骤6 添加另一个配合
这里关注的是长臂和配重块之间的枢轴受力,因此需要对另一个枢轴也添加一个配合。
选择【模型】选项卡,对另一个枢轴添加一个【同轴心】配合,重命名为“ConcentricC”,如图9-60所示。
步骤7 运行(https://www.xing528.com)
确保不勾选【以套管替换冗余配合】复选框,然后重新运行此算例。
步骤8 生成图解
对配合ConcentricC生成另一个图解,显示Y方向(全局坐标)的反作用力,如图9-61所示。
可以看到力均匀地分布在两个配合之间,然而,这可能只是一个巧合,因为这个分布取决于软件如何移除冗余。这里不会使用柔性配合来确保正确的力分布。

图9-59 查看图解(一)
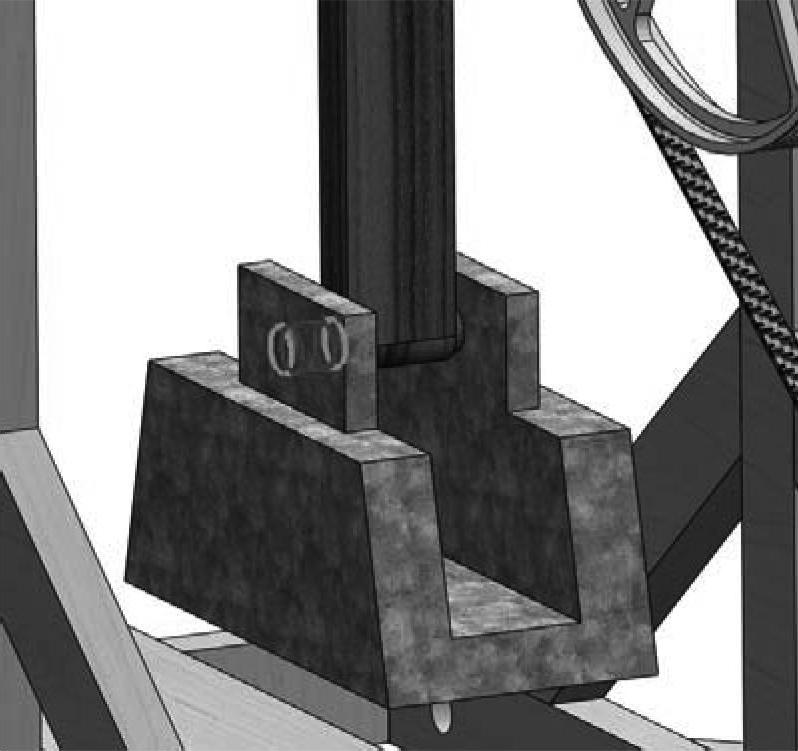
图9-60 添加配合
步骤9 生成本地柔性配合
编辑配合ConcentricB和ConcentricC。选择【分析】选项卡并勾选【套管】复选框。保持默认的数值。
步骤10 运行
确保没有勾选【以套管替换冗余配合】复选框,然后重新运行此算例。此时模型仍然存在大量冗余,但这些冗余并不影响分析两个枢轴。
步骤11 查看图解
现在图解显示力被两个配合承担,如图9-62所示。
步骤12 更改比例
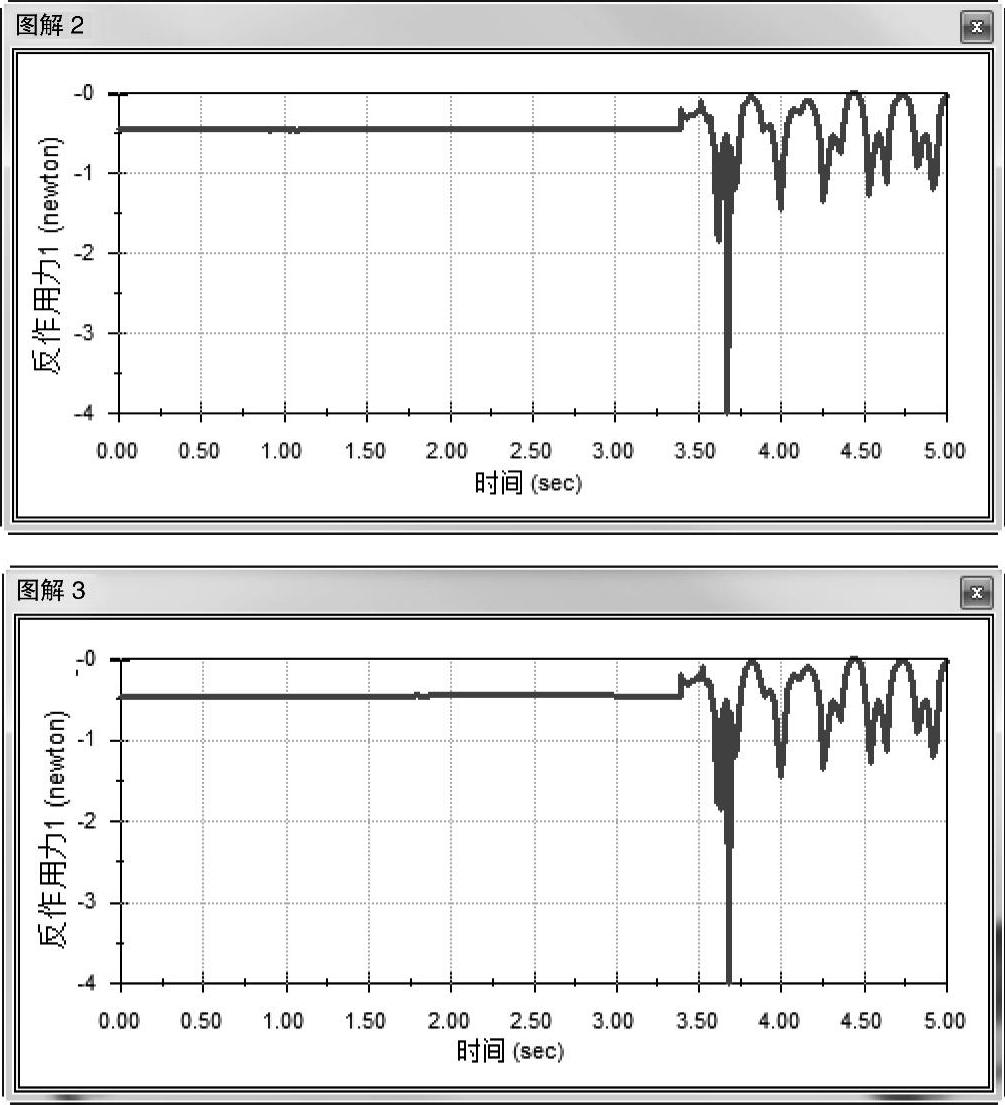
图9-61 查看图解(二)
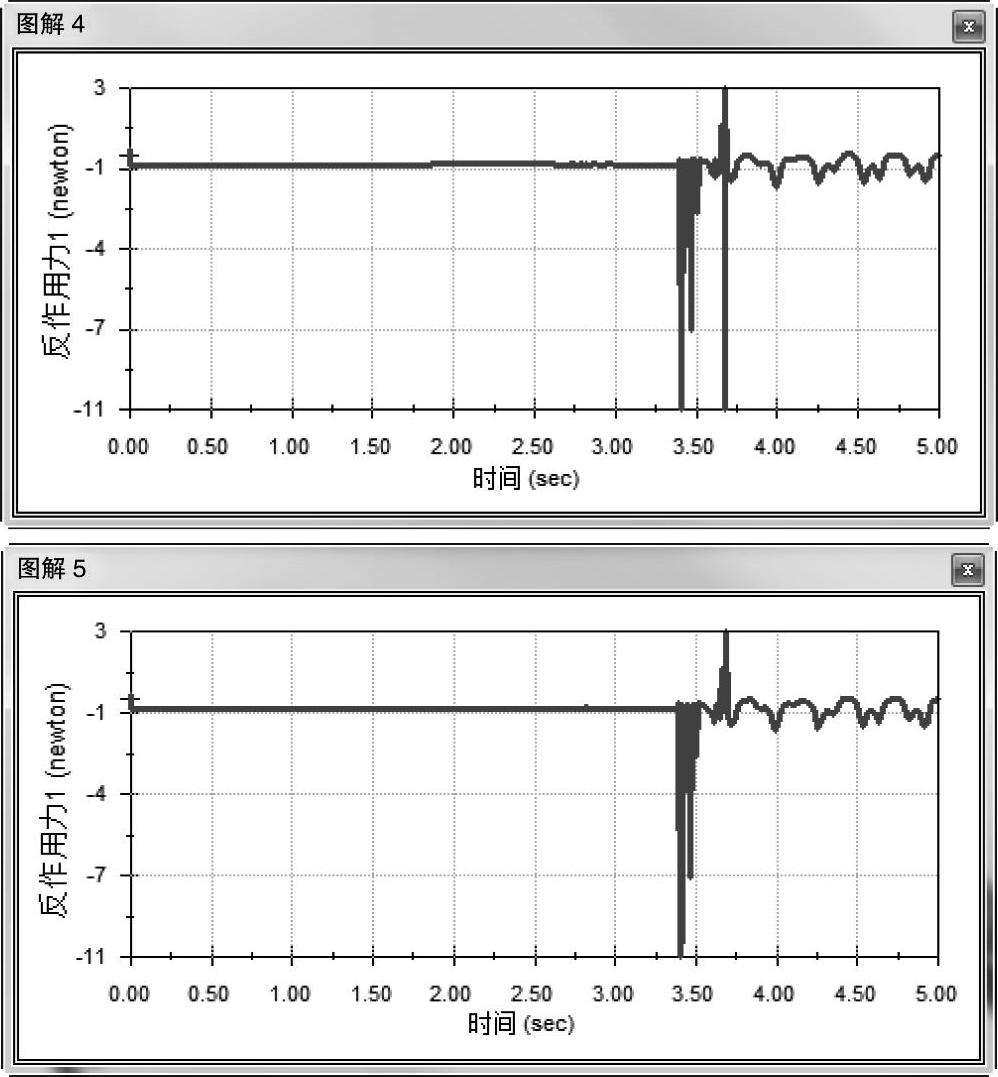
图9-62 查看图解(三)
为了便于阅读,修改这两个图解以显示Y轴:
● 【起点】设置为“-5”。
● 【终点】设置为“5”。
● 【主单位】设置为“1”。
可以看到力几乎完全一致,如图9-63所示。
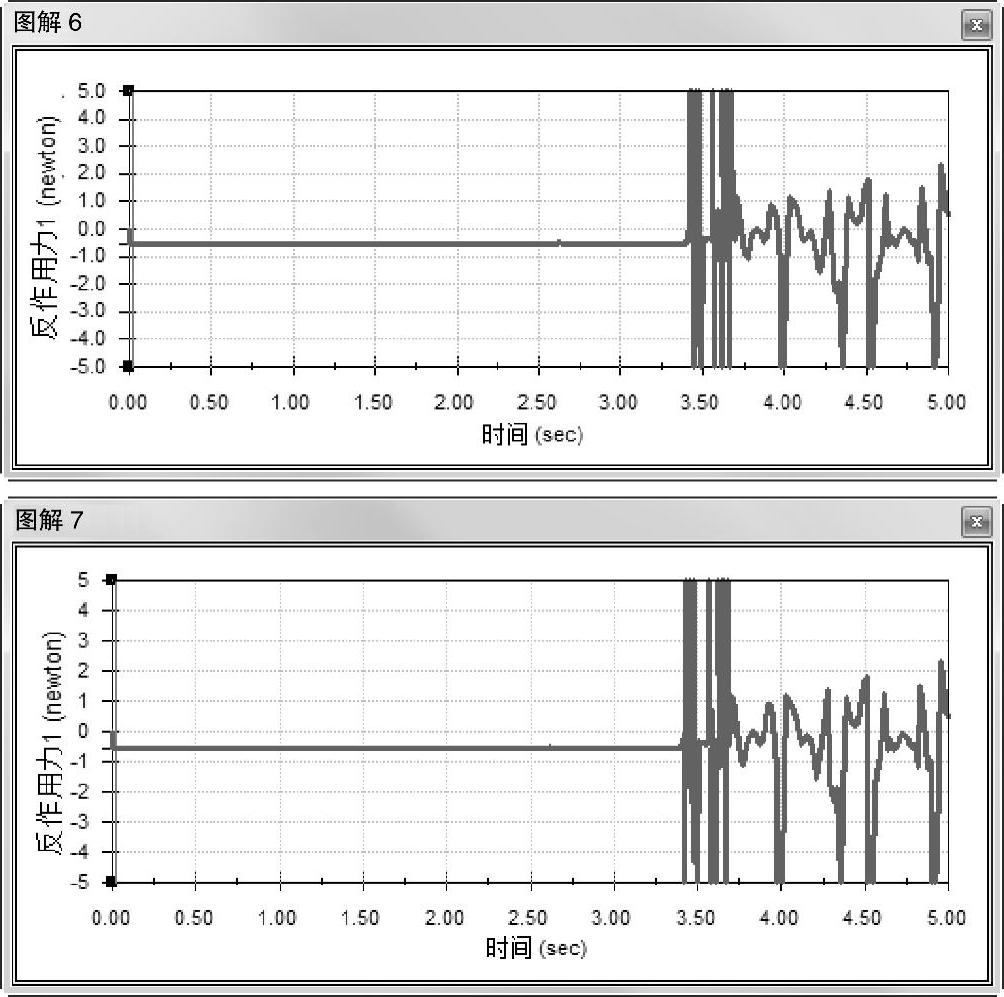
图9-63 查看图解(四)
步骤13 保存并关闭文件
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。