



本练习将展示在练习9-3建模过程中保证零冗余的一个短暂环节。这里将重新使用从练习9-3获得的模型,即运动学机构,并研究其模型创建阶段的早期,如图9-31所示。模型将出现一个冗余,本练习的目标是在多个几何约束(诸如点和轴的重合这样的简单配合及类似的情况)的帮助下移除这个冗余约束。
本练习将应用以下技术:
● 冗余
● 冗余的影响
● 在积分器中移除冗余
● 检查冗余
项目描述
本练习将以剪式升降机为对象,练习移除并控制模型自由度数量的过程。这里只有基座和第一层剪式支架,余下的零部件都已经被压缩了,主要零部件为cylinder和piston。
操作步骤
步骤1 打开装配体文件
打开文件夹“SolidWorks Motion Simulation\Lesson09\Exercises\Zero Redundancy Model”下的文件“Scissor_Lift.SLDASM”。platform和layers3~6都已经被压缩了。
步骤2 运行分析Exercise Study
马达已经在练习9-3中设置完毕,因此用户只需单击【计算】。
步骤3 查看自由度
本地配合组中显示有一个冗余。右键单击MateGroup1并单击【自由度】。在总自由度为零时,机构将按照预期运动。此时还可以看到一个冗余约束,且绕X转动的冗余约束Con-centric16将被移除,如图9-32所示。

图9-31 折叠架
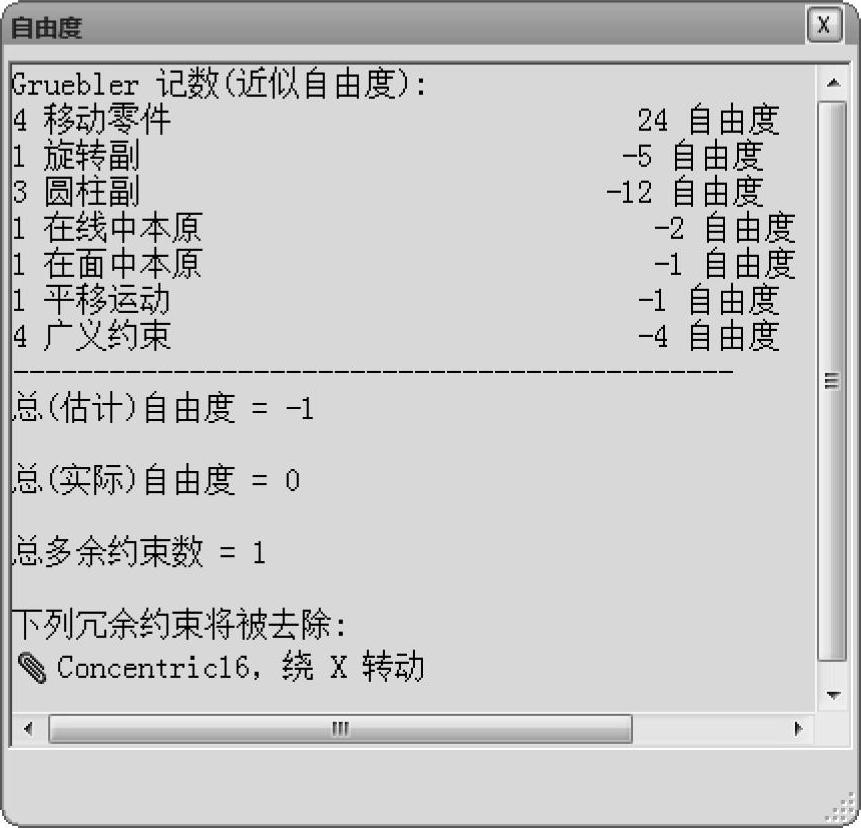
图9-32 自由度结果2
步骤4 确定方向
这个冗余约束与本地X轴有关,该如何确定这个本地坐标轴的方向呢?生成一个基于配合的图解。Concentric16是cylinder和piston之间的一个配合。对Concentric16生成一个图解,选择【反作用力】、【Y分量】。
如图9-33所示,X方向(红色)沿着两个零件的共同轴线。当我们观察到这个方向之后,取消离开图解。
这个同轴心配合是冗余的,因为cylinder和piston都不能绕这个轴转动。cylinder和Base存在铰链配合,而piston与横杆之间存在一个同轴心配合。
步骤5 移除配合
cylinder和piston需要保持同轴心,因此不能删除该配合。相反,使用两个简单的配合替换铰链配合(这将移除5个自由度)。
【删除】配合Hinge1。cylinder的末端现在可以自由移动了,如图9-34所示。
步骤6 添加配合
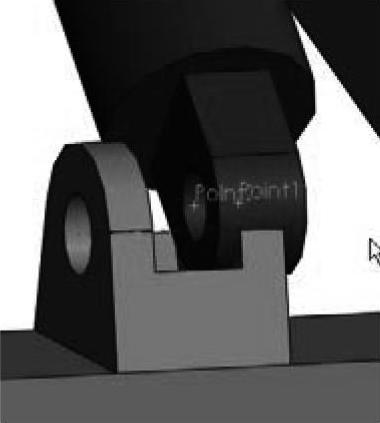
对下面的配合,我们将配合点和轴,保证可以看清二者,如图9-35所示。
提示
为了看到点,用户需要设置装配体模式为【还原】。
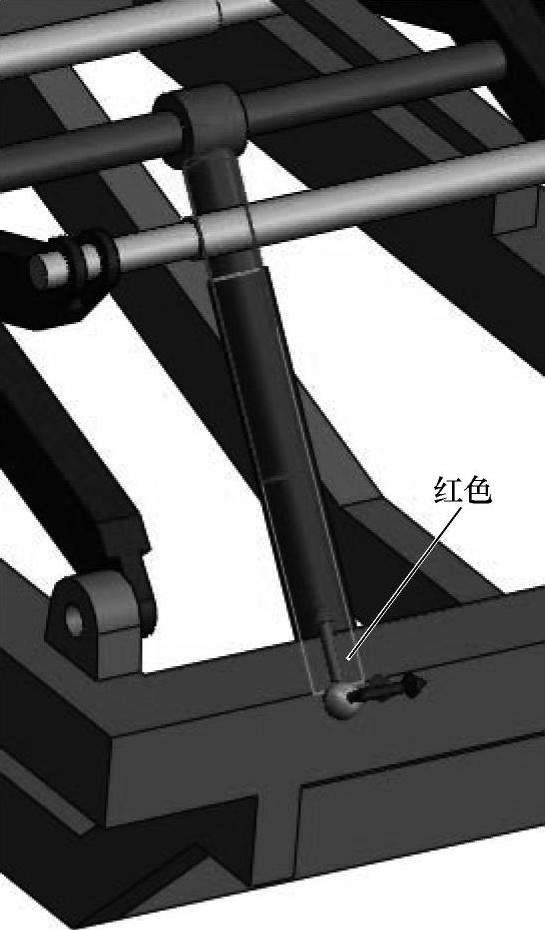
图9-33 确定方向
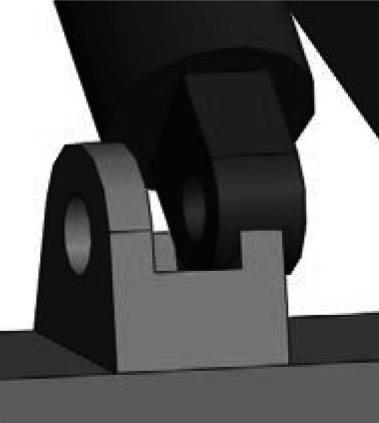
图9-34 移除配合
 (https://www.xing528.com)
(https://www.xing528.com)
图9-35 添加配合
在cylinder末端的孔内已经生成了两个点。Point1位于孔的轴线上,在两个平行面的中间位置。Point2也位于孔的轴线上,但与一侧的表面共面。在Point1和支架孔的轴线之间添加一个【重合】配合,如图9-36所示。在Point2和支架凸台的内侧面之间添加第二个【重合】配合,如图9-37所示。
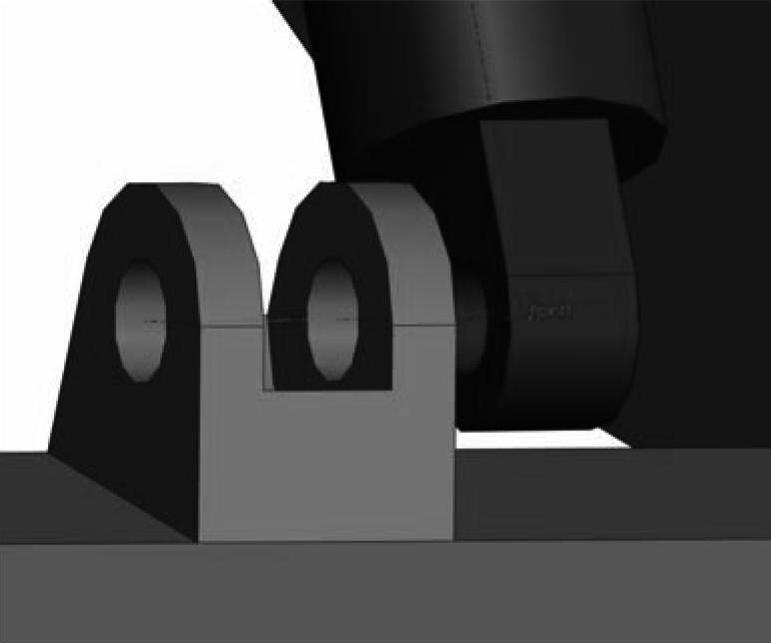
图9-36 添加第一个【重合】配合
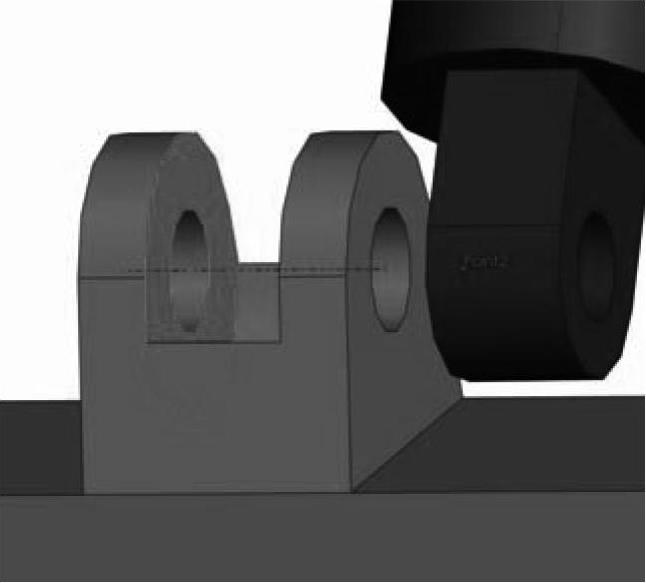
图9-37 添加第二个【重合】配合
提示
用户可以添加这些配合,而无所谓本地或全局。
步骤7 运行
运行仿真并观察结果。本算例能够正确运行。
步骤8 检查自由度
右键单击MateGroup1并单击【自由度】。可以看到仍然存在一个总自由度,对正确的结果而言,自由度应该为零,如图9-38所示。
步骤9 判定问题
尝试拖拽piston沿着横杆移动。此时可以看到cylinder会发生转动,如图9-39所示。
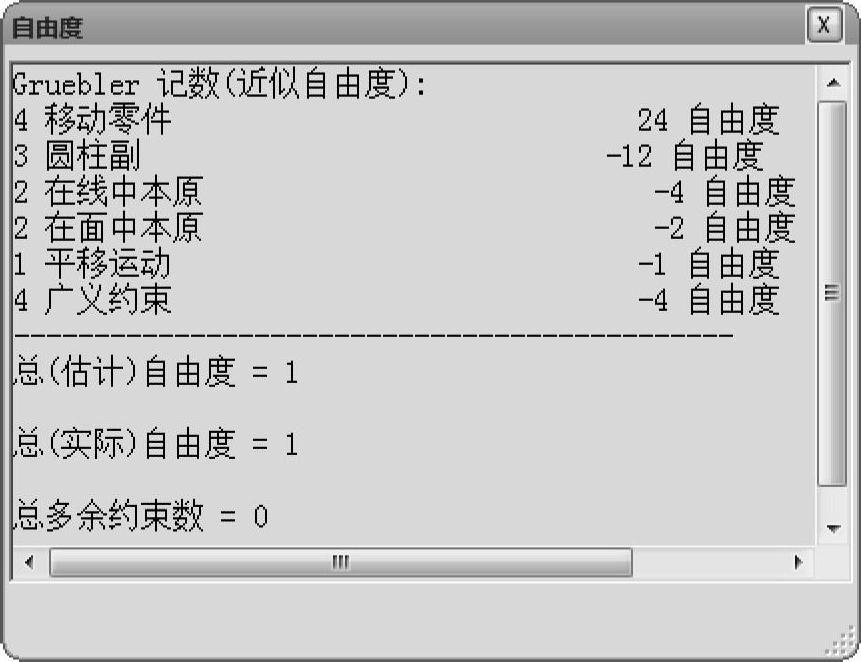
图9-38 自由度结果3
步骤10 编辑配合
Point2和面之间的配合不足以阻止旋转,因此不得不提升配合的等级,以移除一个额外的自由度。
编辑【重合】配合,将Point2替换为图中显示的边线,如图9-40所示。
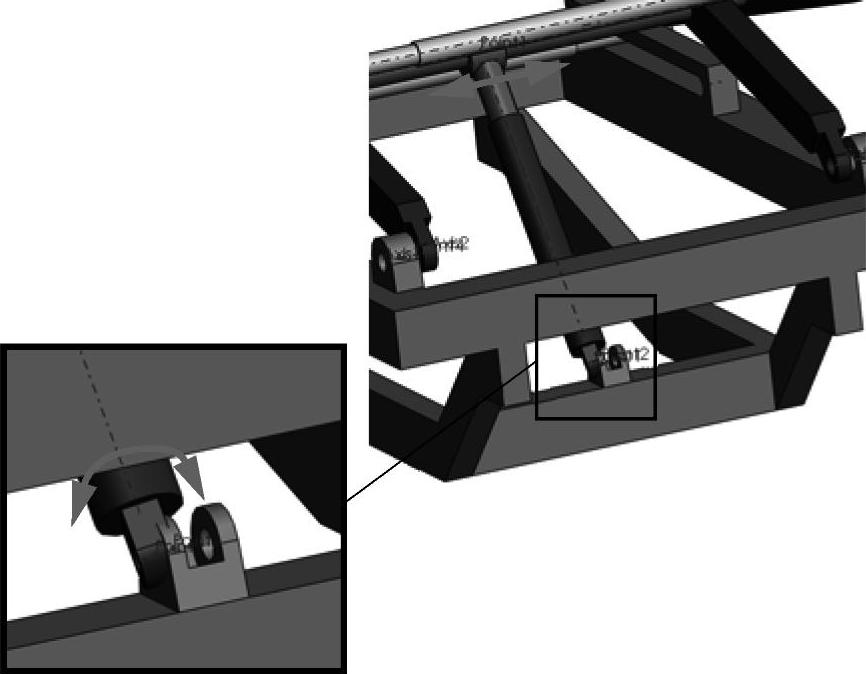
图9-39 拖动模型
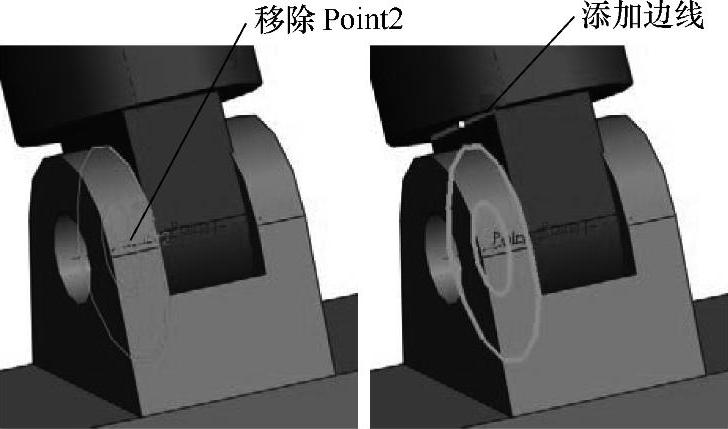
图9-40 编辑【重合】配合
步骤11 运行仿真
运行这个仿真并观察结果。
步骤12 检查自由度
右键单击MateGroup1并单击【自由度】。现在的自由度显示为零,这也是运动学系统中应该得到的结果,如图9-41所示。
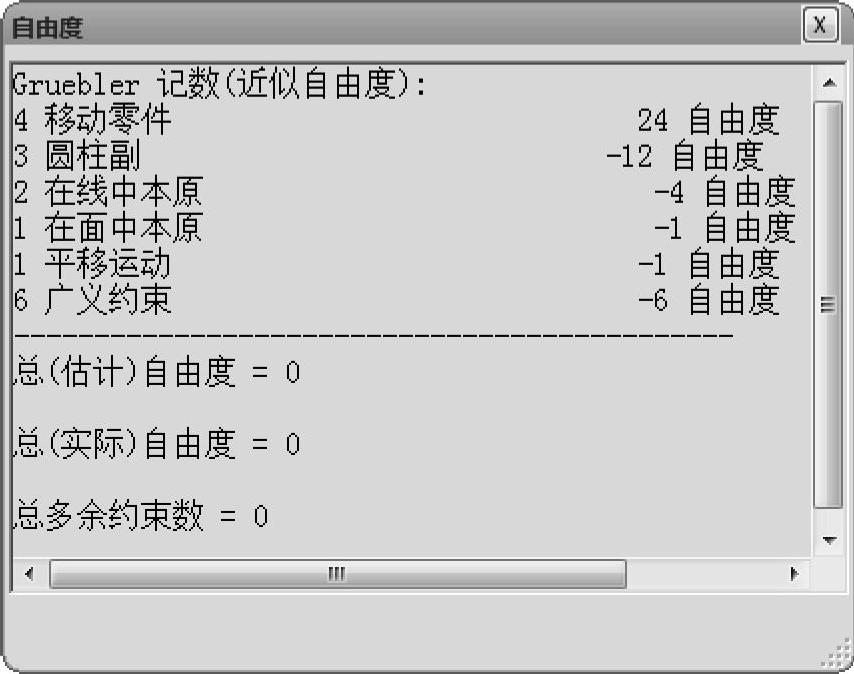
图9-41 自由度结果4
步骤13 保存并关闭文件
如果用户打算继续下一个练习,则可以维持装配体的开启状态,否则请保存并关闭文件。
总结
这个练习展示了如何检测一个配合带有冗余约束,移除并使用简单的几何约束组合进行替换,例如点与轴线的重合。和前面练习中提到的一样,这个技术需要额外的参考几何体(点、轴),且创建过程可能非常漫长。当其他技术无法给出所需的结果时才可以使用这种方法。总的来说,没有冗余的模型要比带有多个冗余的模型更容易让积分器计算出结果。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。