



将现实问题转化为一个数学模型求解时常会涉及冗余,冗余是刚体运动仿真时的固有问题,理解冗余并了解冗余如何影响机构的仿真及结果是非常重要的。
从基本层面上讲,当对配合机构上的某一指定的自由度添加了多余的约束时,将产生冗余约束。
SolidWorks Motion中的约束通过在微分-代数方程(Differential and Algebraic equations,DAE)的控制系统中添加代数约束方程,从系统中移除自由度(DOF)。
SolidWorks Motion用6个代数方程描述被配合约束的自由度(见图9-4),具体如下:
方程1~3约束了移动自由度,而方程4~6约束了旋转自由度,其中“i”标记在第一个零件上,“j”标记在第二个零件上。上面的方程可以理解如下:
1)Xi-Xj=0表示在世界坐标系下,“i”、“j”标记的X轴的值相等。
2)Yi-Yj=0表示在世界坐标系下,“i”、“j”标记的Y轴的值相等。
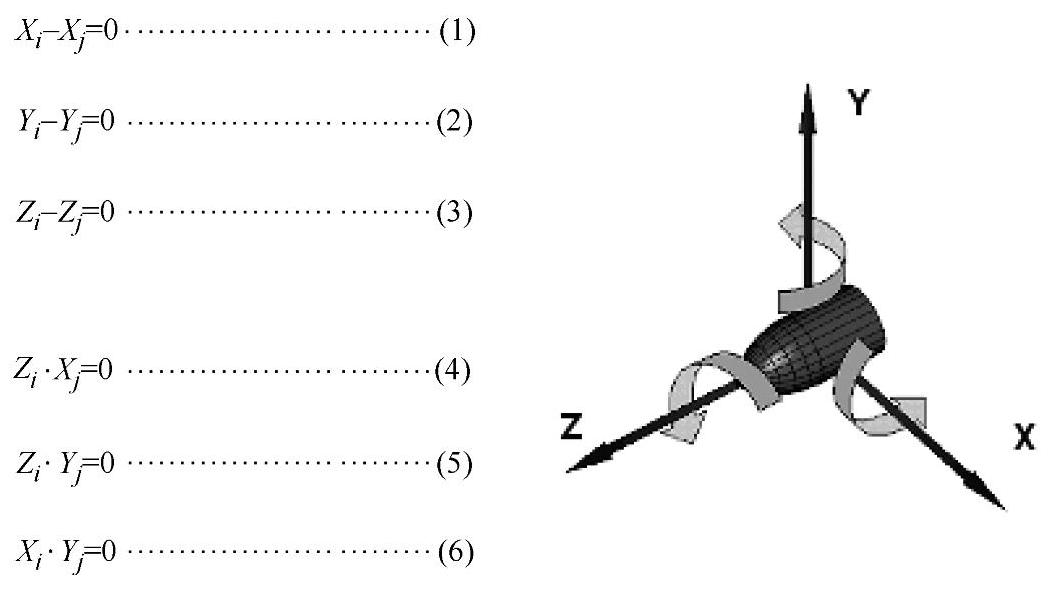
图9-4 自由度约束
3)Zi-Zj=0表示在世界坐标系下,“i”、“j”标记的Z轴的值相等。(https://www.xing528.com)
4)Zi·Xj=0表示“i”标记的Z轴与“j”标记的X轴保持垂直(也就是说围绕公共Y轴没有旋转)。
5)Zi·Yj=0表示“i”标记的Z轴与“j”标记的Y轴保持垂直(也就是说围绕公共X轴没有旋转)。
6)Xi·Yj=0表示“i”标记的X轴与“j”标记的Y轴保持垂直(也就是说围绕公共Z轴没有旋转)。
方程4~6中的符号“·”表示点积运算。当两个矢量的点积为零时,矢量间相互垂直。
模型中每个固定配合使用6个方程(1~6),一个同轴心配合(两个球)使用3个方程(1~3),一个铰链配合使用5个方程(1~5)等。
注意这些配合是如何使用方程1和2的。任何约束自由度的重复都将导致系统的过约束,或者说引入冗余约束方程。
SolidWorksMotion输出警告信息以帮助理解哪个方程是冗余的,哪些自由度并不需要约束。有一个冗余约束意味着有两个或更多的配合都试图控制一个特定的自由度。在简单情况下,积分器将自动移除一个冗余约束方程以消除冗余。在复杂情况下,积分器移除的可能不是正确的方程,这将影响到原始设计。
注意
这导致仿真还在运行,但给出了错误的运动或答案。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。