



在这个练习中,将生成一个多片凸轮,用于控制滑块的运动,如图6-31所示。齿轮在旋转过程中,牵附着一个传动盘和滑块固定板,如图6-32所示。
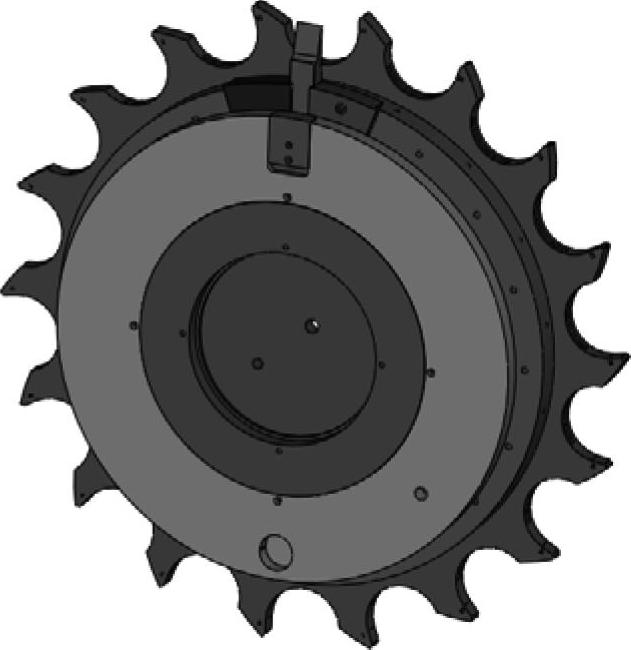
图6-31 多片凸轮
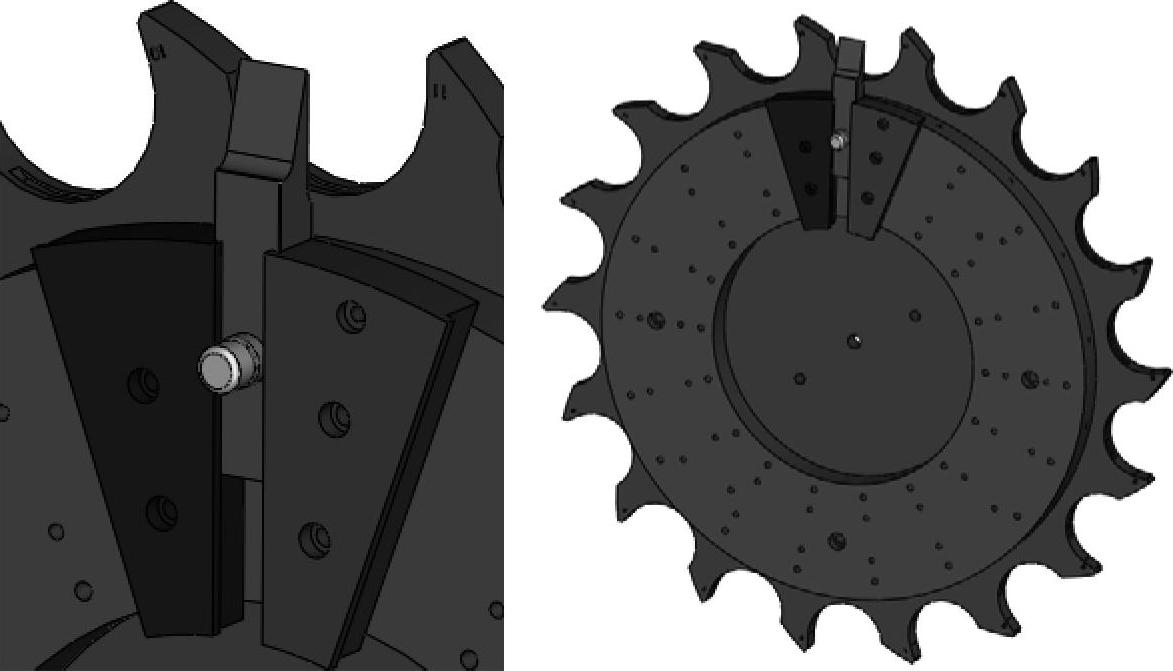
图6-32 模型细节
在滚轴的作用下,滑块将在两个凸轮盘之间沿一条路径上、下移动。该系统使得当内部的凸轮盘转动时滑块沿径向向外移动,当外部的凸轮盘转动时滑块沿径向向内滑动,如图6-33所示。
本练习将应用以下技术:
● 生成一个凸轮轮廓
● 跟踪路径
● 从跟踪路径生成曲线
项目描述
装配体以8000°/s的速度旋转。每转一周,滚轴将按照预先定义好的时间表径向移动,而这个时间表来自一个附加文件。从基于预先定义的运动路径生成凸轮,该运动路径源自一个单独文件,如图6-34所示。

图6-33 零部件位置
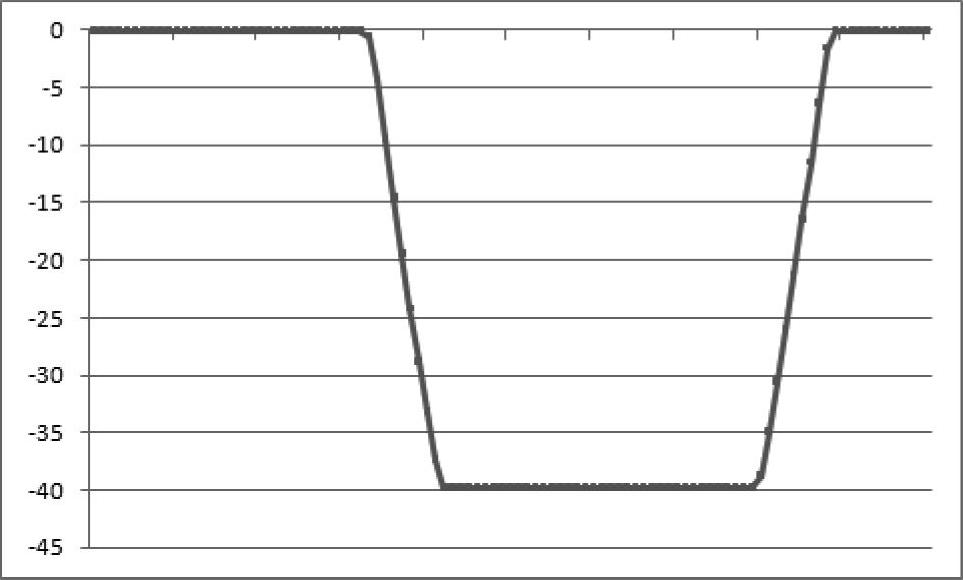
图6-34 路径曲线
操作步骤
步骤1 打开装配体文件
从文件夹“SolidWorks Motion Simulation\RockerCAMProfile\Lesson06\Exercises”下打开文件“rocker cam profile exercise”。
步骤2 检查装配体
如果这里隐藏toothed wheel和drive_plate装配体,可以看到两个凸轮盘处在适当的位置,但是凸轮路径还没有定义,如图6-35所示。
步骤3 单位
确认装配体单位被设定为【MMGS(毫米、克、秒)】。
步骤4 新建算例
新建一个运动算例。
步骤5 定义滚轴运动
在rocker的底面添加一个线性马达。运动必须指定为相对于另一个零部件,因此需要选择图6-36所示的引导板(699-0431)。
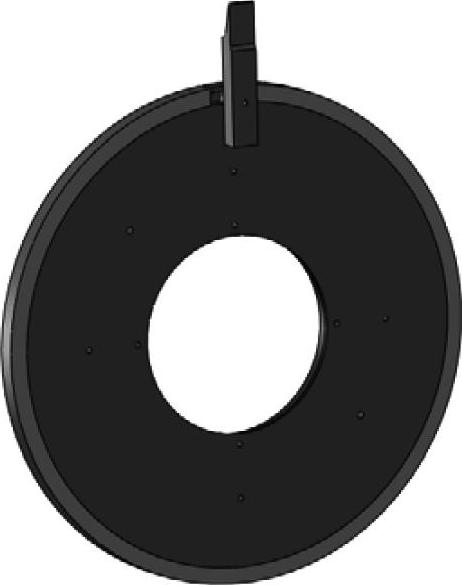
图6-35 凸轮位置
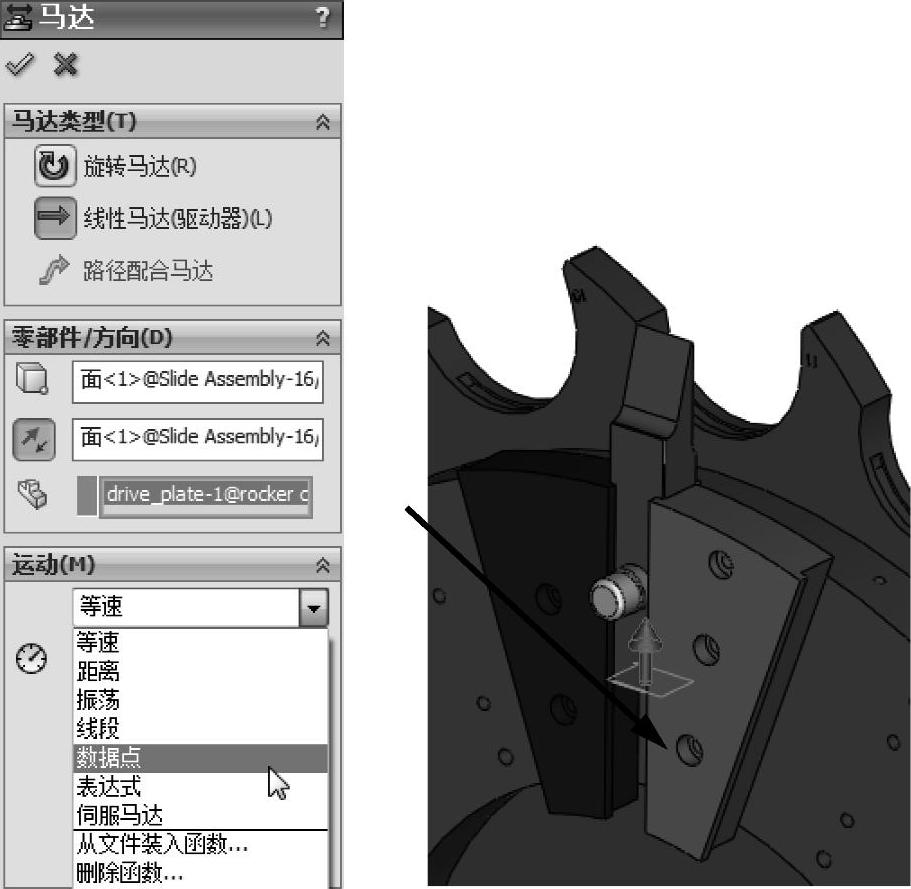
图6-36 定义马达
选用【数据点】、【位移】并加载文件“Slide Translation Motion.csv”。在Interpolation type中选择【立方样条曲线】。确保方向是沿径向朝外的,如图6-36所示。
提示
为了方便定义,用户可以隐藏Plate CAM Assembly。
步骤6定义旋转
对drive_plate assembly(或零件699-0414)添加一个旋转马达。设定马达以8000°/s的速度等速旋转。当从顶视图观察时,旋转应沿逆时针方向。
步骤7 运动算例属性
因为仿真的时间非常短暂,需要一个高的帧率来保证拥有足够的点数,以得到光滑的结果。设置运动算例属性,【每秒帧数】设定为“2500”。
步骤8 运行算例
设置时长为0.045s。在8000°/s的速度下,这刚好对应装配体转动了一整圈。
步骤9 定义一个结果图解
在rocker上的滚轴(699-0413)中心生成一个跟踪路径,如图6-37所示。
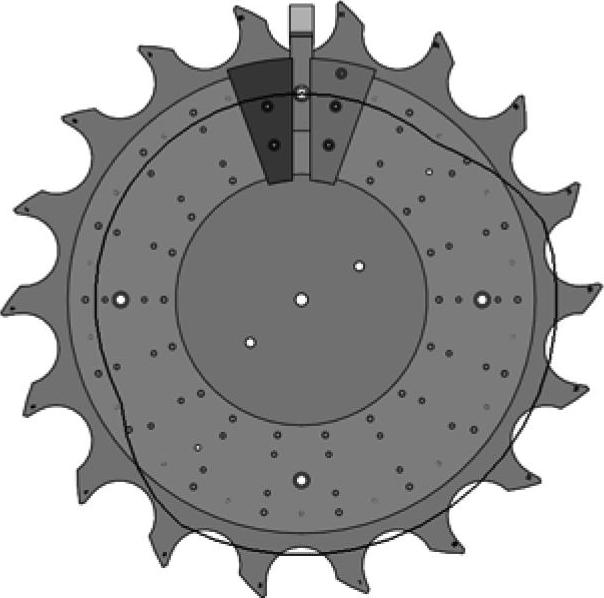
图6-37 生成跟踪路径
提示
如果曲线看上去不够光滑,可在【工具】/【选项】中提高图像品质。
步骤10 生成曲线
不用选择任何对象,右键单击跟踪路径图解,选择【从跟踪路径生成曲线】,然后选择【从路径生成曲线】。因为这里什么都没有选择,这条曲线将作为一个特征显示在装配体的FeatureManager设计树中。(https://www.xing528.com)
步骤11 建模
现在将单独处理装配体的零部件,因此不需要停留在运动算例中。单击【模型】选项卡。
步骤12 隐藏零部件
在装配体中生成凸轮路径,如果遇到不受影响的零件则直接隐藏,这样更容易看清操作过程。【隐藏】toothedwheel、Slide Assembly和drive plate装配体。
步骤13 编辑零件
选择PlateCAMAssembly下的零件699-0416,单击【编辑零件】 。
。
步骤14 编辑草图
编辑Base-Extrude下的Sketch3。这只是一个定义零件外侧面的圆形草图。这里将对跟踪路径曲线偏移滚轴直径的一半,并以此偏移后的曲线来替代这个草图。
在FeatureManager设计树中,选择曲线(这将位于零件和装配体的上面)。针对上一步骤中生成的跟踪路径曲线,使用【转换实体引用】来创建一条曲线,并设置属性为【作为构造线】。
单击【等距实体】并输入“6mm”(滚轴直径的一半)作为偏移量。确保偏移的方向朝内,如图6-38所示。单击【确定】完成偏移,【删除】草图中最初的圆。退出草图和零件编辑模式,轮廓形状如图6-39所示。
步骤15 外侧凸轮
编辑“Plate CAM Assembly”中的零件699-0417。在面向699-0417零部件的表面上(当使用下视图时更靠近的面),使用相同的步骤生成一个草图。此次是朝外偏移6mm。拉伸一个切除特征并指定深度为8.8mm,如图6-40所示。退出零件编辑模式。
步骤16 确定内径
从外侧凸轮板的中心和图6-41所示的顶点之间测量距离。这和生成keeper上轮廓曲线的半径相同。
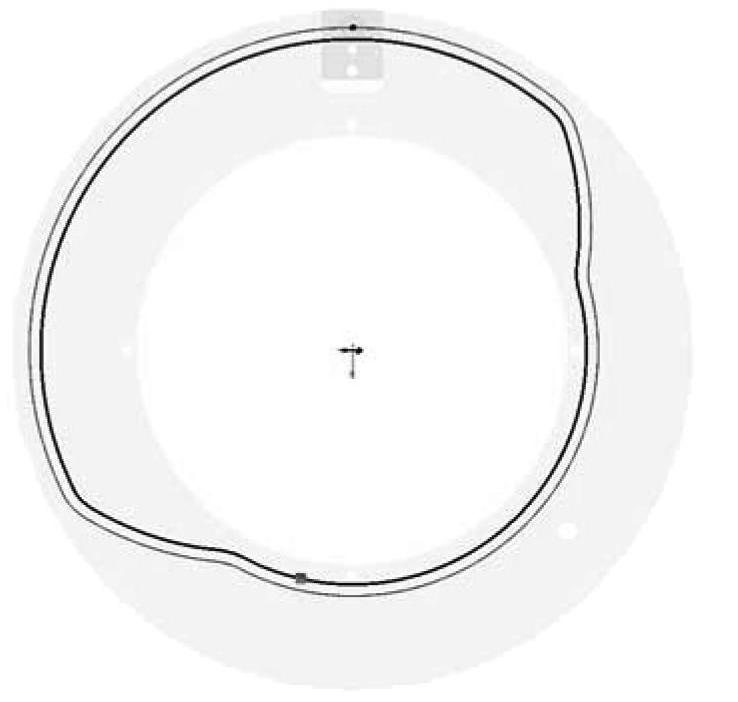
图6-38 编辑草图
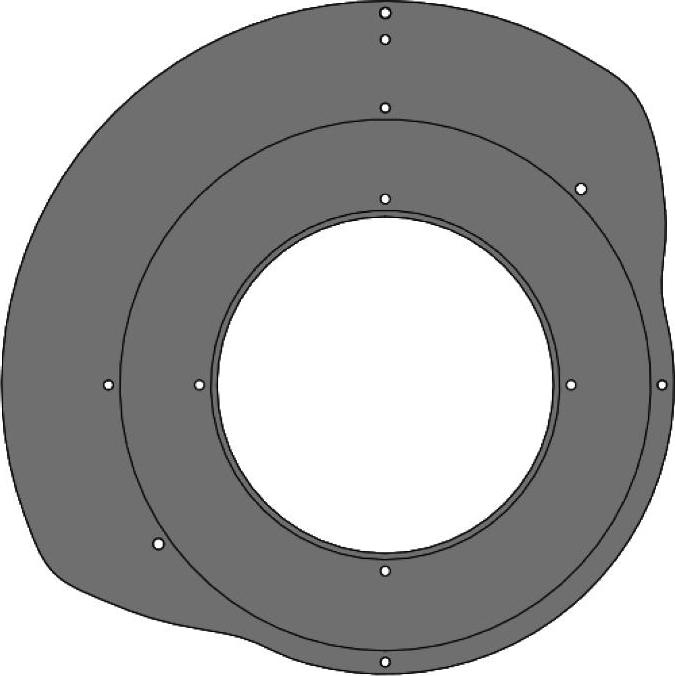
图6-39 轮廓形状

图6-40 拉伸切除
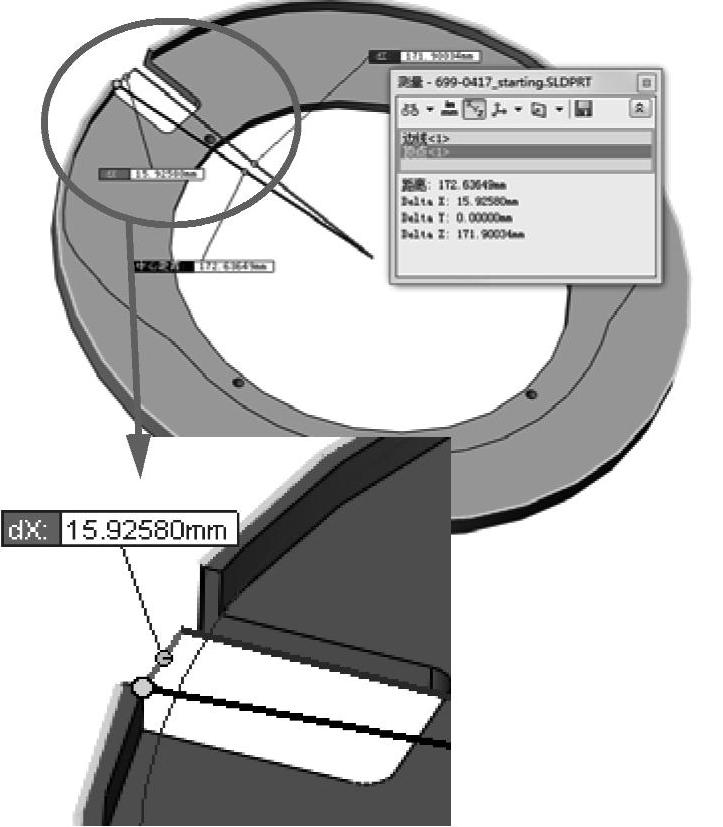
图6-41 测量尺寸
加亮显示“距离”并按下<Ctrl-C>复制数值至粘贴板,因为在下一步中会用到它。
步骤17 显示零件
返回【编辑装配体】模式并显示零件keeper。keeper是用于装配滚轴时允许进入的锁片。
步骤18 编辑草图
编辑“Boss-Extrude1”的草图。双击圆弧半径的尺寸并粘贴来自粘贴板的测量距离,如图6-42所示。
步骤19 查看完成的凸轮
返回到装配体中检查刚生成的凸轮。此时得到的应是一条光滑的凸轮路径,如图6-43所示。
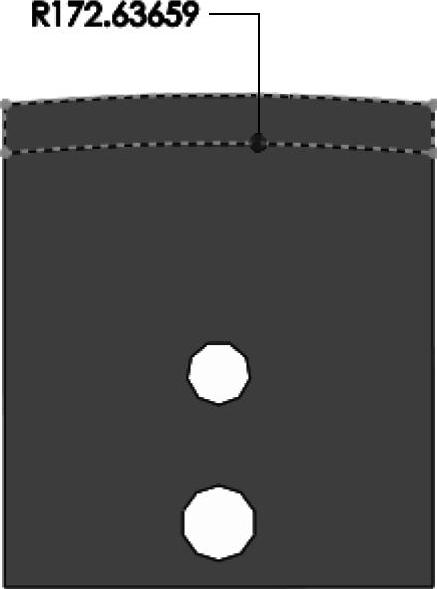
图6-42 编辑草图
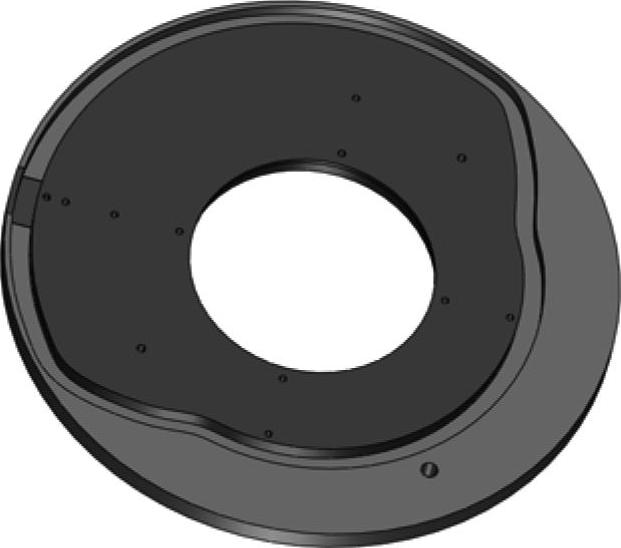
图6-43 凸轮路径
步骤20 新建运动算例
复制现有运动算例到一个新的算例中,将新的算例命名为“withcontacts”。
步骤21 压缩线性马达
步骤22 接触
在所有必要的零部件之间创建实体接触。
技巧
用户可以方便地使用接触组来减少定义的数量。
步骤23 设置算例属性
勾选【使用精确接触】复选框。
步骤24 计算运动算例
步骤25 分析结果
检验设计的凸轮装配体是否提供了滚轴预期的运动。
步骤26 保存并关闭文件
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。