



Desmodromic凸轮可以使用各种机构在多个方向启动和控制,如图6-21所示。在下面的练习中,我们将首先使用一个传统的扭力弹簧来创建一个简单的机构。然后,再创建第二个凸轮来替换系统中的扭力弹簧。这时,机构只会由凸轮系统驱动。
本练习将应用以下技术:
● 生成一个凸轮轮廓
● 跟踪路径
● 从跟踪路径生成曲线
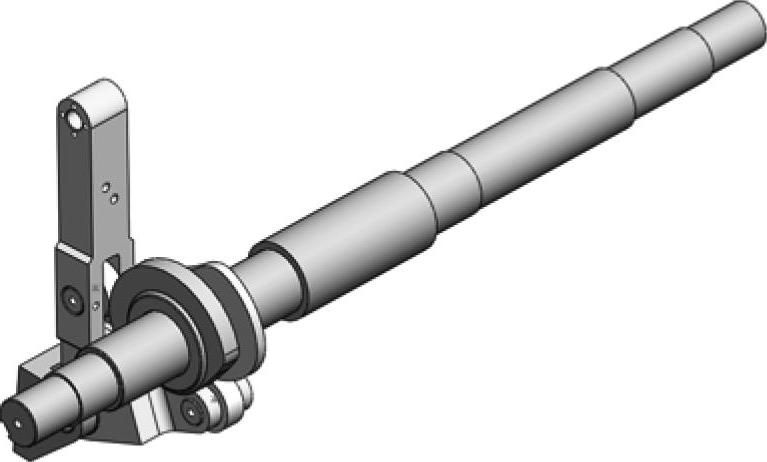
图6-21 带凸轮模型
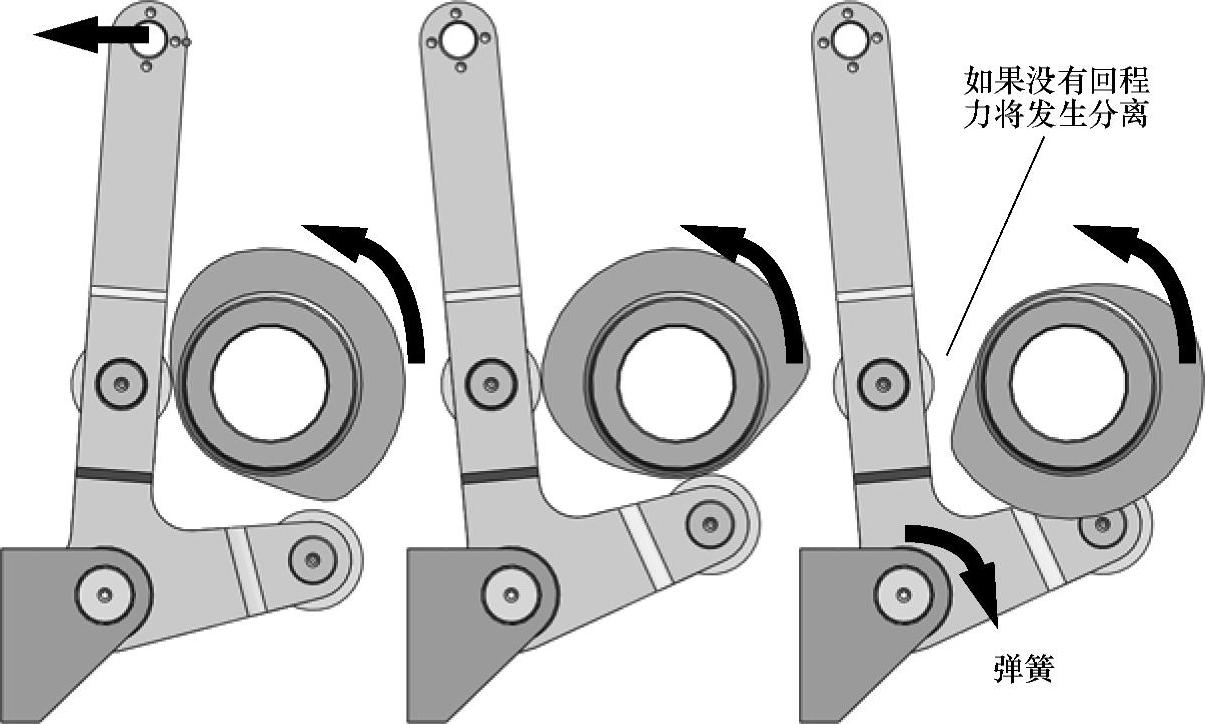
图6-22 运动轨迹
项目描述
在这个项目中,我们已经设计了一个凸轮,可以驱动连接件按预期运动。当凸轮转动时,它将通过接触推动连接件逆时针方向运动,如图6-22所示。在本练习的第一部分,我们将对连接件应用一个扭力弹簧来保证接触。
操作步骤
步骤1 打开一个装配体文件
打开文件夹“SolidWorks Motion Simulation\Lesson06\Exercises\Desmodromic CAM”下的文件“DesmodromicCAM”。第一个凸轮(cam1)已经创建完毕,并通过一个凸轮配合与从动件roller1配合在一起。
步骤2 单位
确认装配体的单位设定为【MMGS(毫米、克、秒)】。
步骤3 新算例
新建一个运动算例。
步骤4 约束轴向运动
当前轴可以自由地沿轴向运动。添加一个线性马达以防止轴shaft的任何轴向运动,如图6-23所示。设置【持续时间】为“10s”。
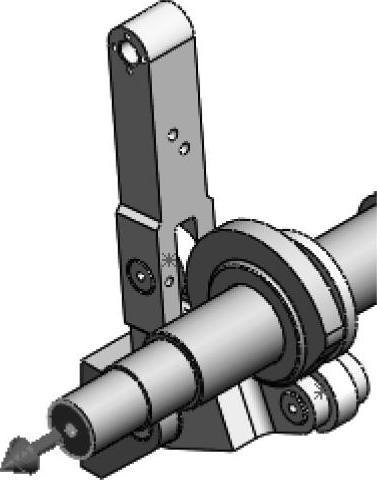
图6-23 马达方向
步骤5 添加旋转马达
对轴添加一个旋转马达,设置在10s之内旋转360°。
步骤6 凸轮配合
在SolidWorks中检查配合,注意到在cam1和从动件(roller<1>)之间存在一个凸轮配合,如图6-24所示。这个配合用于动画是可以接受的,但用于分析则显得不现实,因为这将强迫两个曲面在一起。
步骤7 运行算例
设置算例的时长为10s并运行。算例运行后将显示所需的运动。
步骤8 移除凸轮配合
在FeatureManager设计树中,压缩凸轮配合。
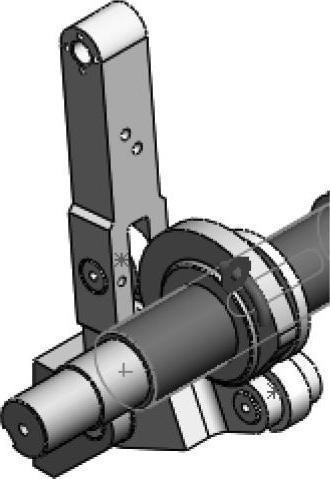
图6-24 凸轮配合
提示
在压缩配合前,用户必须将时间轴拖回0位置。
步骤9 运行算例
cam1仍会转动,但是连接件link不会再移动,因为在“cam1”和上面的从动件roller<1>之间没有连接。
步骤10 添加一个弹簧
爆炸展开装配体,可以更加容易地选择link上的曲面。添加一个扭转弹簧保证凸轮刚度系连在一起。刚度系数】设定为“10.00牛顿·mm/度”,【自由角度】设定为“30.00度”。当从前视图观看时,方向应该呈顺时针,如图6-25所示。
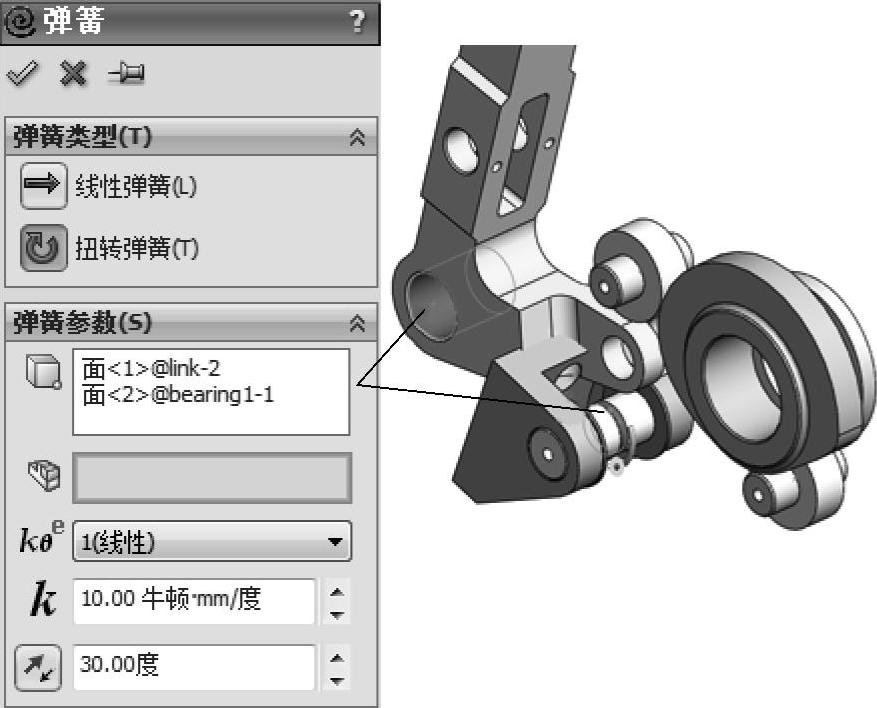
图6-25 添加弹簧
提示
【自由角度】定义了相对于当前配置未加载扭转弹簧的方向。
步骤11 添加接触
在“cam1”和靠上的从动件roller<1>之间添加一个实体接触。指定【材料】为【Steel(Greasy)】,并勾选【摩擦】选项卡。(https://www.xing528.com)
步骤12 运行算例
在低速下,能够获得正确的运动,设计工作正常。
如果在高速下运行这个系统,可能会碰到一些问题,即弹簧无法确保从动件与凸轮紧密接触。如果发现发生分离,则从动件会在凸轮上发生跳动,得到的运动将与设计的初衷相违背。
这时为了强制接触,将设计第二个凸轮。当从前视图来观察系统时,第一个凸轮可以通过接触绕连接件逆时针转动,顺时针转动取决于弹簧。在接下来的部分,将使用第二个凸轮来替代弹簧,可以绕连接件顺时针转动。两个凸轮一起工作,确保在凸轮和从动件之间发生接触。
步骤13 压缩扭转弹簧
提示
在压缩弹簧时必须将时间轴拖至0处。
步骤14 删除接触并解压缩凸轮配合
使用跟踪路径功能来生成第二个凸轮路径。因为需要在整个旋转中维持接触,将采用凸轮配合来强制接触。删除cam1与它的从动件cam1之间的接触。在FeatureManager设计树中,解压缩凸轮配合。
步骤15 运行算例
步骤16 跟踪图解
新建一个图解,生成第二个凸轮的曲线。这时需要选择第二个从动件roller的中点,可以通过选择第二个从动件roller上用于定义中点的边线来实现。同时选择cam2的表面,如图6-26所示。
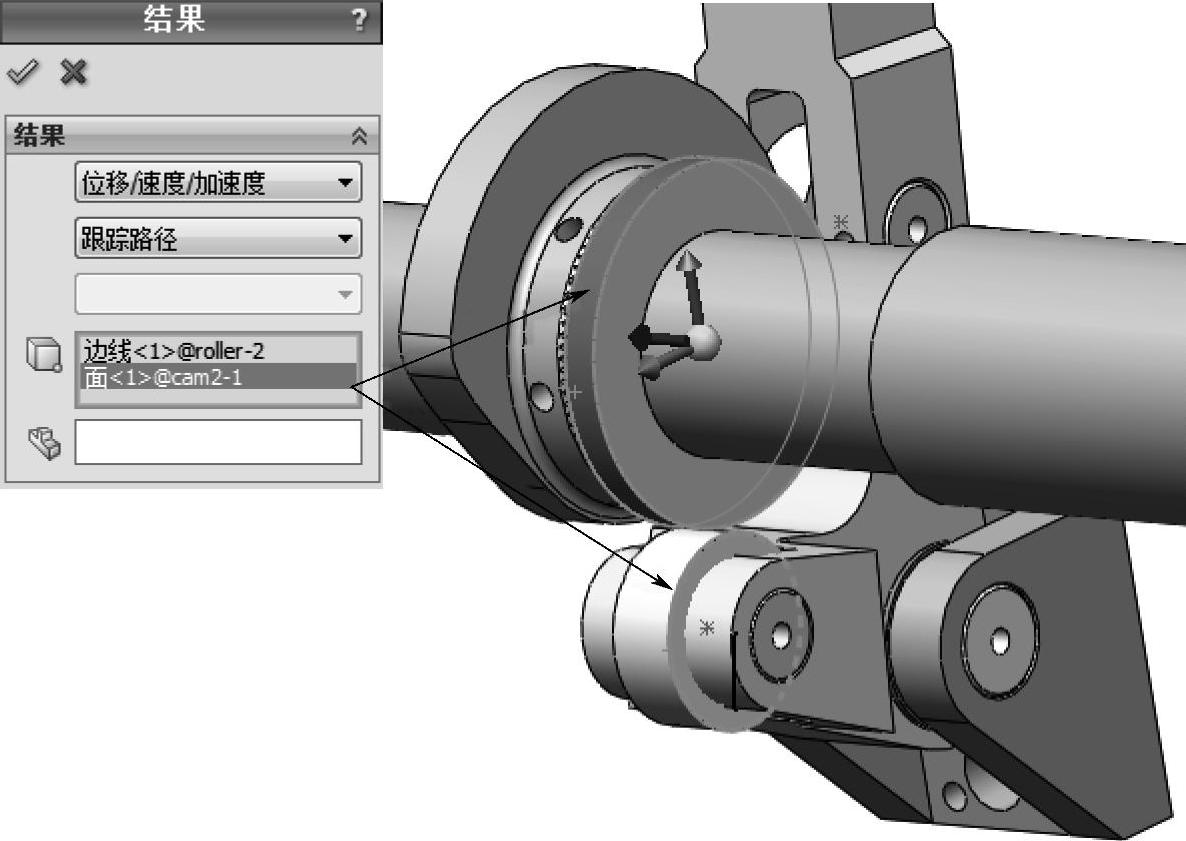
图6-26 定义图解
步骤17 查看图解
现在得到了基本的路径,但是这太大了,此时必须跟踪第二个从动件roller<2>的中心。
测量第二个从动件roller<2>。因为得到的尺寸为52mm,不得不将cam2的大小减去一半,也就是26mm,如图6-27所示。
步骤18 输出曲线到参考零件
步骤19 打开零件
在cam2的窗口打开零件。
步骤20 拉伸新的凸轮
在零件的Front基准面上生成一幅草图。
基于已有零件的外部边线,在草图中使用【转换实体引用】来生成一个圆。
再次使用【转换实体引用】,从跟踪路径生成一条曲线。将这个转换得到的曲线设置为【作为构造线】的类型。
从跟踪路径选择【作为构造线】的曲线,并生成一根朝内等距,尺寸为26mm的曲线。
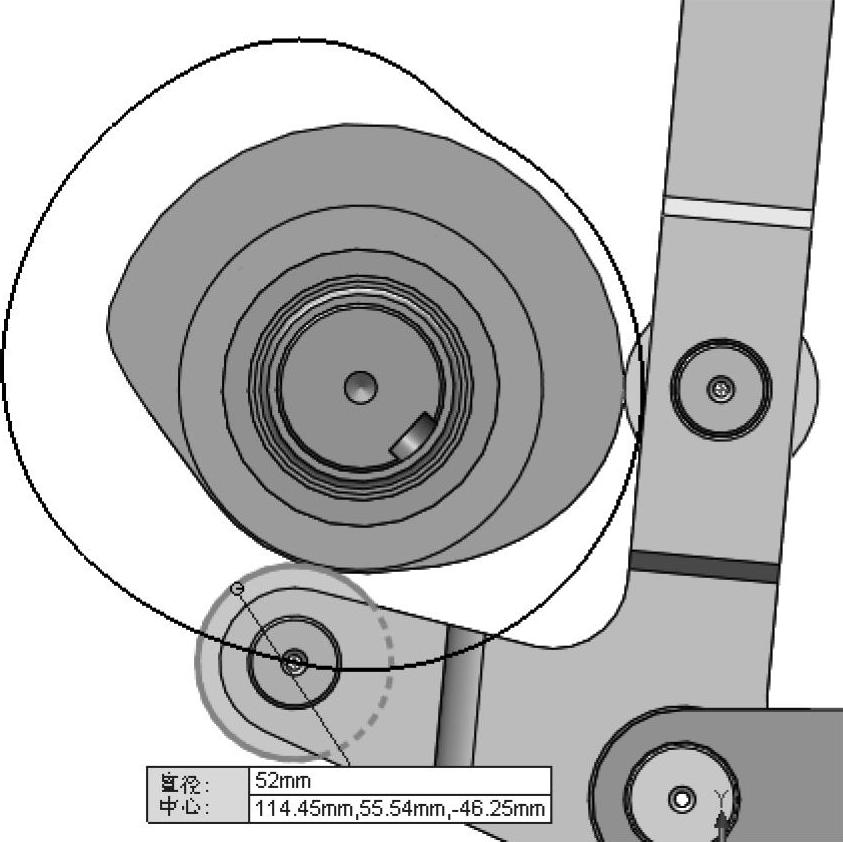
图6-27 测量尺寸
将这个新的cam2拉伸10mm,则两个实体刚好重合。【合并】结果如图6-28所示。
步骤21 运行算例
返回至装配体窗口。现在将运行使用两个凸轮驱动运动的算例,如图6-29所示。【压缩】凸轮配合。在每个凸轮和对应的从动件之间添加接触。【材料】为【Steel(Greasy)】,并选择【摩擦】。
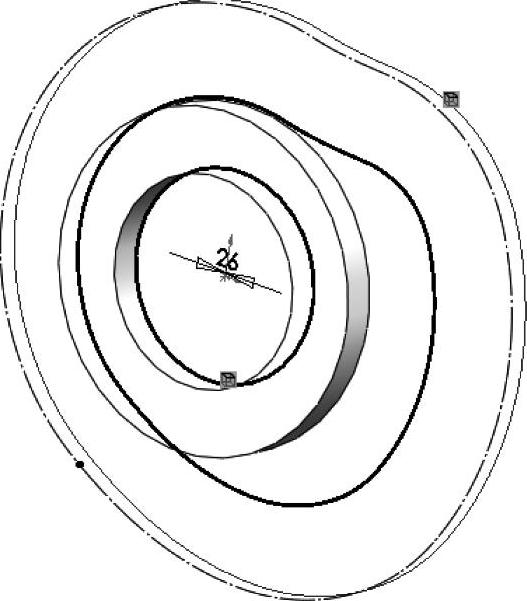
图6-28 拉伸凸轮
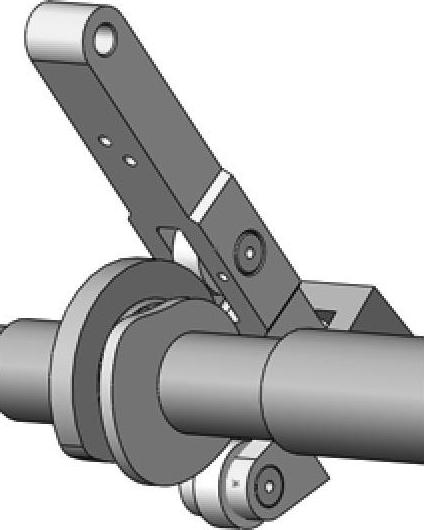
图6-29 添加接触
步骤22 运行算例
步骤23 查看结果
两个凸轮在整个旋转过程中始终与它们的从动件保持接触,其中一个绕连接件逆时针转动,而另一个则顺时针转动。
技巧
使用一个竖直分割先切分平面,在轴转动时观察前后视图,如图6-30所示。
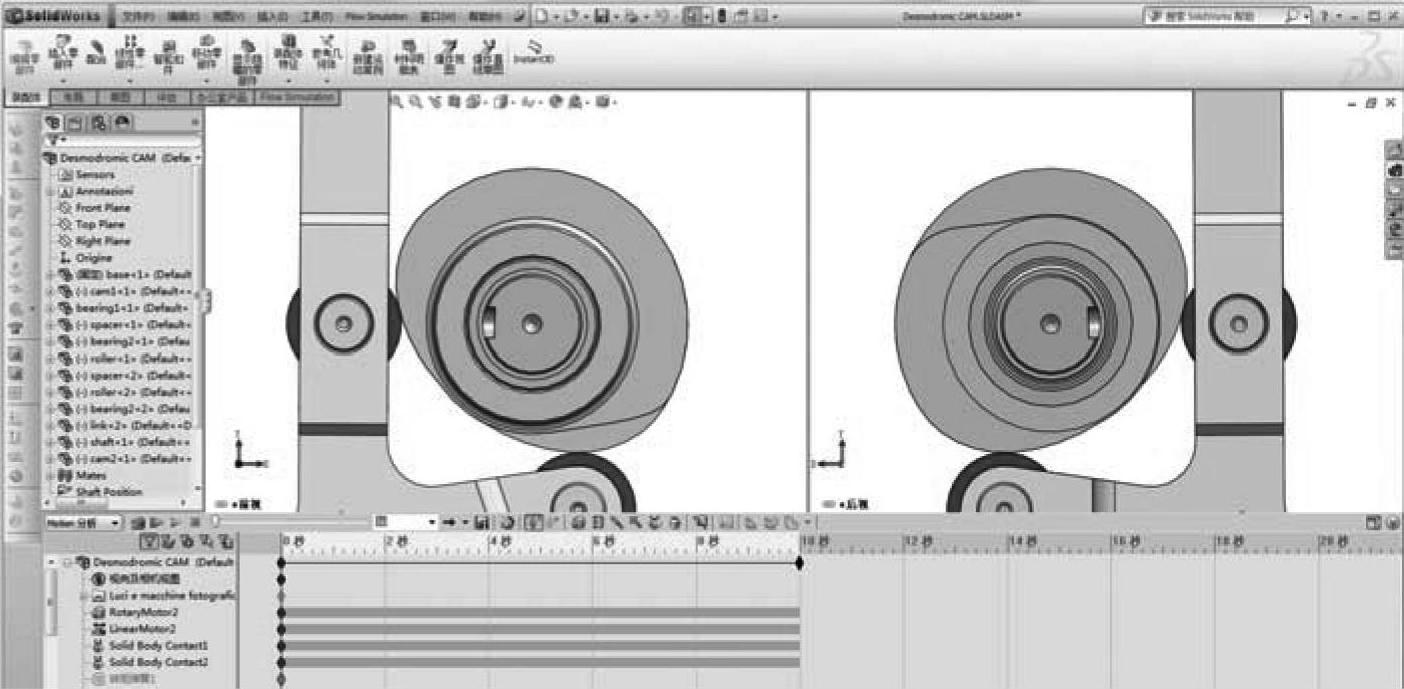
图6-30 前后视图
步骤24 保存并关闭文件
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。