



本练习和练习4-2:传送带(无摩擦)和练习4-3:传送带(带摩擦)中使用的传送带模型是相同的,只是在前面两个练习中是使用实体接触进行求解的,而本练习将使用曲线与曲线接触进行求解。如图5-13所示。
本练习将应用以下技术:
● 接触力
● 函数表达式
● 精确接触
项目描述
在这个练习中,我们将使用曲线与曲线接触来替代实体接触进行求解,并比较二者产生的结果。
我们的目标是使用函数控制一个力将传送带的速度维持在0.62m/s。
图5-13 传送带
操作步骤
步骤1 打开装配体文件
从文件夹“SolidWorks Motion Simulation\Lesson05\Exercises\Conveyor Belt”中打开文件“Conveyor Belt”。这个装配体包含练习4-3:传送带(带摩擦)中完成的文件组,当时使用了实体接触来模拟凸轮相切的条件。
步骤2 复制算例
复制算例“Solid body contact”到一个新算例中,并命名为“curve to curve contact”。
步骤3 删除所有实体接触
步骤4 曲线到曲线接触
在每个轮的边界曲线和模型conveyor_path的左侧(在上一步中,实体接触被删除的同一侧)边界曲线之间添加一个曲线到曲线接触。同样,这又将生成12个接触对。
在【材料】处选择【Steel(Greasy)】,保持静态和动态摩擦的默认数值不变。勾选【曲线始终接触】复选框,如图5-14所示。
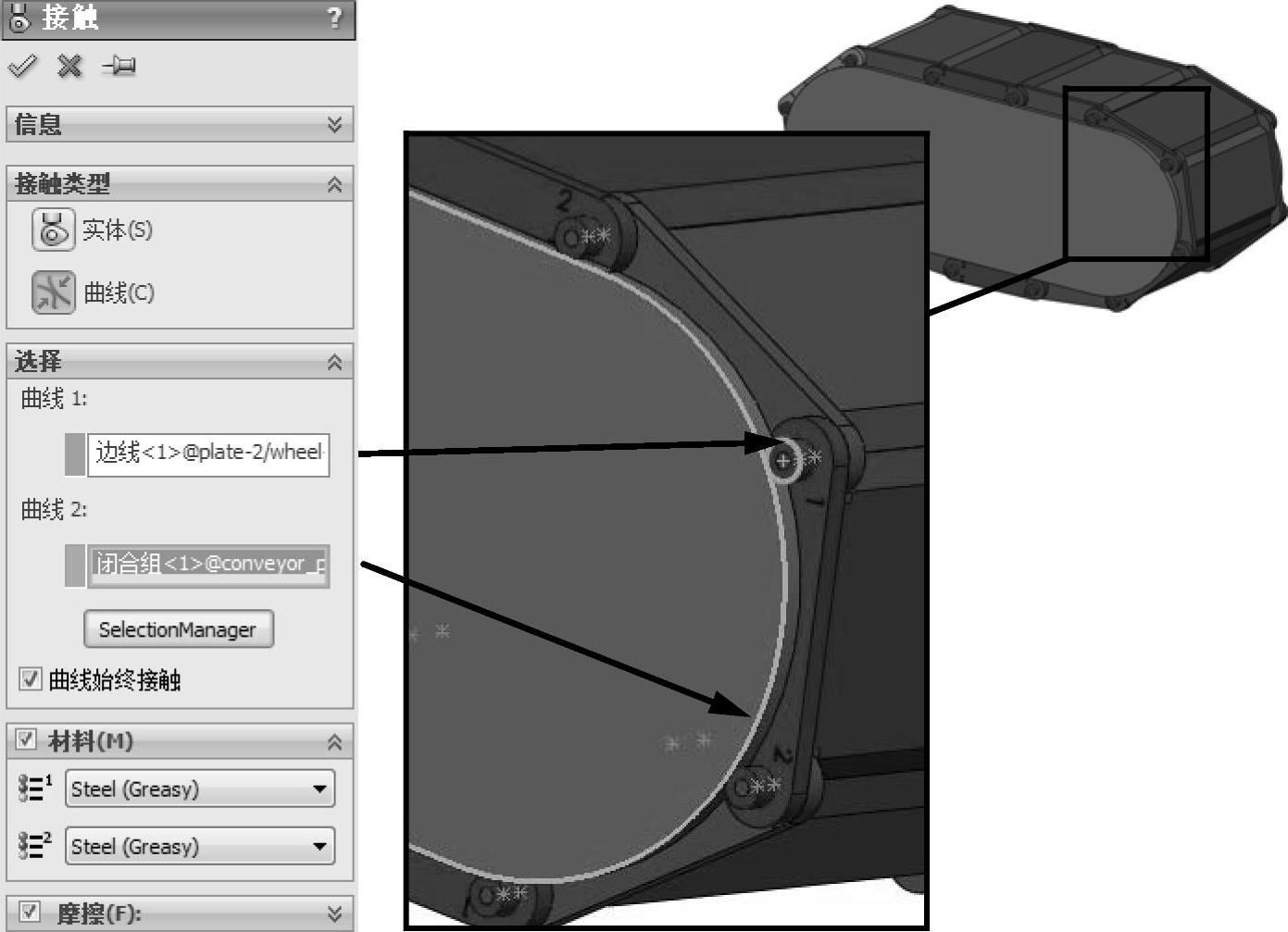
图5-14 定义接触(https://www.xing528.com)
提示
没有看到【向外法向方向】,是因为勾选了【曲线始终接触】复选框。
步骤5 运动算例属性
设置【每秒帧数】为“100”,在【高级选项】中选择【GSTIFF】积分器。勾选【以套管替换冗余配合】复选框,如图5-15所示。
提示
在这个模型中使用【以套管替换冗余配合】选项,是因为冗余情况比较复杂。我们将在第9章再讨论这个选项及冗余。
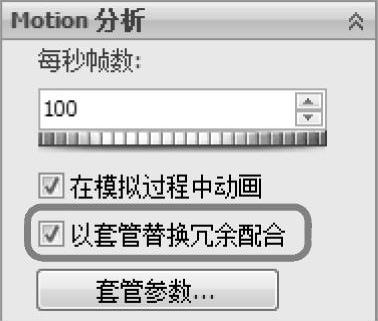
图5-15 定义运 动算例属性
步骤6 运行算例
设置算例持续时间为2s。
步骤7 播放动画
以25%的速度播放动画,观察传送带是如何运动的。
步骤8 图解显示结果
图解显示plate1的速度大小。速度并不像之前一样线性地递增,因为摩擦力阻碍了输入力的作用,而且带接触的运动更加复杂,如图5-16所示。
将上面的结果与练习4-3:传送带(带摩擦)中的结果进行比较,可以发现它们是非常相似的。
步骤9 保存并关闭文件
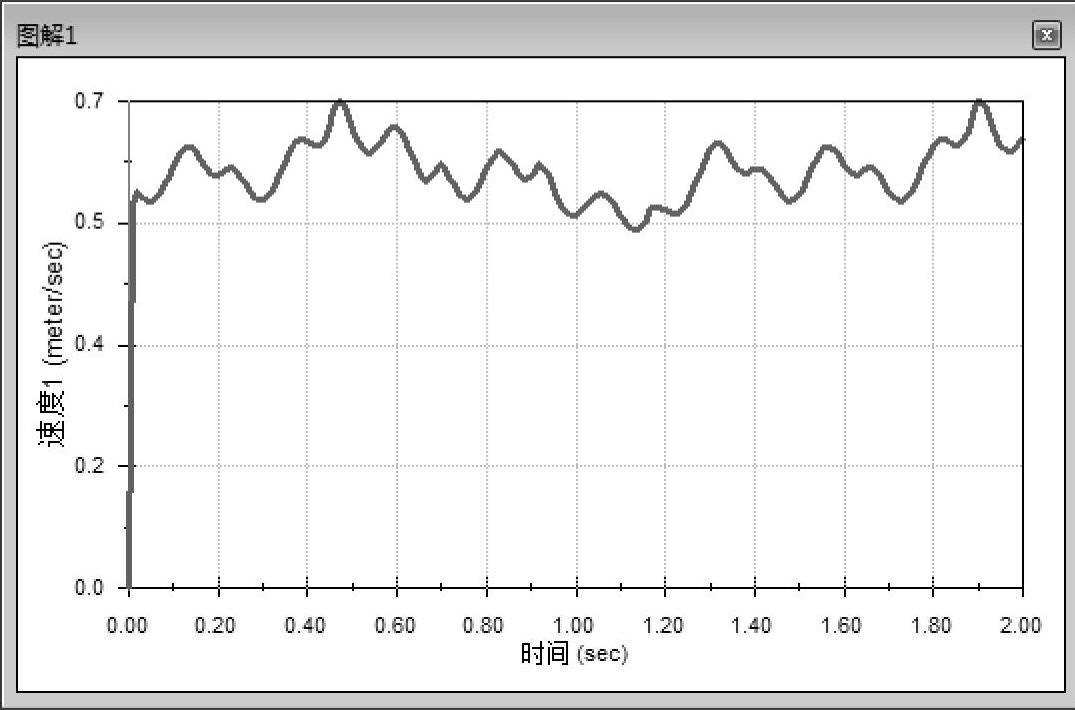
图5-16 查看图解
结论
在练习4-3:传送带(带摩擦)中我们借助实体接触求解了这个问题,而在这个练习中我们使用曲线到曲线接触进行求解。实践表明两种方法得到的结果是相似的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。